基于超宽带的井下巷道的定位导航方法及其装置与流程
本公开涉及定位导航,尤其涉及一种基于超宽带的井下巷道的定位导航方法及其装置。
背景技术:
1、随着煤矿机械化、信息化、数字化和智能化开采的发展,推动了煤矿井下设备技术的升级和设备更新,井下作业对精确定位的要求也越来越高。
2、相关技术中,超宽带(ultra-wideband,uwb)是一种无载波的窄脉冲的无线电通信技术,利用非正弦载波的纳秒级或亚纳秒级的脉冲实现无线通信。uwb定位测量的精度在井下复杂环境中的传播会存在损耗,面对井下巷道纵横交错且大多弯曲和井下复杂性的环境,人员、设备和车辆的位置遮挡、重叠,就会造成uwb定位数据的异常波动和获取时间延时,无法快速精准的有效获取定位数据。因此,如何满足以uwb定位法为基础多技术共融,帮助解决煤矿井下uwb定位技术的数据丢失以及改善数据卡顿延迟,实现煤矿slam视觉雷达实时导航定位,已经成为重要的研究方向之一。
技术实现思路
1、本公开旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本公开的一个目的在于提出一种基于超宽带的井下巷道的定位导航方法。
2、本公开的第二个目的在于提出一种基于超宽带的井下巷道的定位导航装置。
3、本公开的第三个目的在于提出一种电子设备。
4、本公开的第四个目的在于提出一种非瞬时计算机可读存储介质。
5、本公开的第五个目的在于提出一种计算机程序产品。
6、为达上述目的,本公开第一方面实施例提出了一种基于超宽带的井下巷道的定位导航方法,包括:
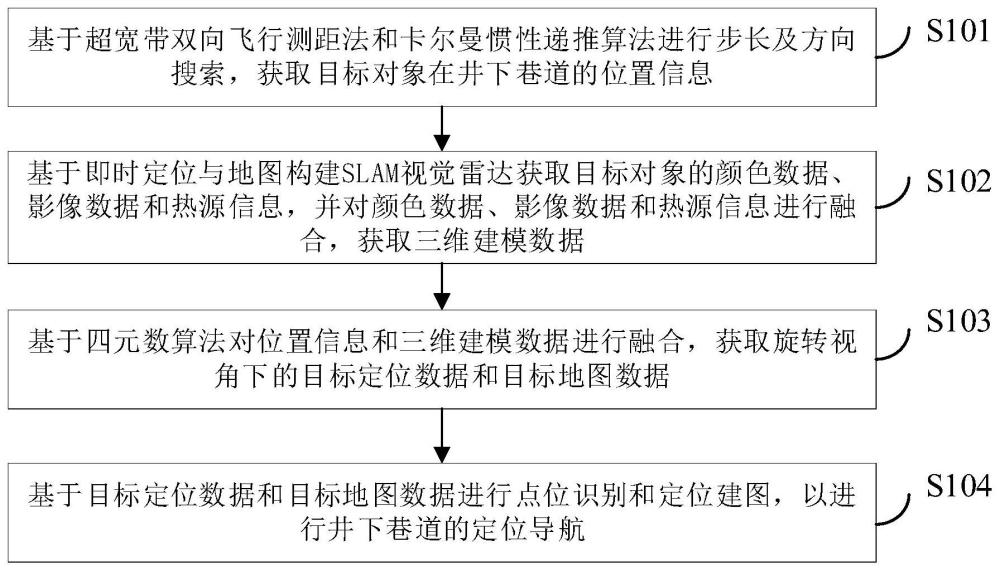
7、基于超宽带双向飞行测距法和卡尔曼惯性递推算法进行步长及方向搜索,获取目标对象在井下巷道的位置信息;
8、基于即时定位与地图构建slam视觉雷达获取目标对象的颜色数据、影像数据和热源信息,并对颜色数据、影像数据和热源信息进行融合,获取三维建模数据;
9、基于四元数算法对位置信息和三维建模数据进行融合,获取旋转视角下的目标定位数据和目标地图数据;
10、基于目标定位数据和目标地图数据进行点位识别和定位建图,以进行井下巷道的定位导航。
11、本公开实施例中,基于超宽带双向飞行测距法和卡尔曼惯性递推算法进行步长及方向搜索,获取目标对象在井下巷道的位置信息,可以近距离短时间内避免定位数据丢失卡顿的问题,快速精准的有效获取定位数据。基于即时定位与地图构建slam视觉雷达获取目标对象的颜色数据、影像数据和热源信息,并对颜色数据、影像数据和热源信息进行融合,获取三维建模数据;基于四元数算法对位置信息和三维建模数据进行融合,获取旋转视角下的目标定位数据和目标地图数据,可以满足以uwb定位法为基础多技术共融,基于目标定位数据和目标地图数据进行点位识别和定位建图,以进行井下巷道的定位导航,可以帮助解决煤矿井下uwb定位技术的数据丢失以及改善数据卡顿延迟,实现煤矿slam视觉雷达实时导航定位。
12、为达上述目的,本公开第二方面实施例提出了一种基于超宽带的井下巷道的定位导航装置,包括:
13、第一获取模块,用于基于超宽带双向飞行测距法和卡尔曼惯性递推算法进行步长及方向搜索,获取目标对象在井下巷道的位置信息;
14、第二获取模块,用于基于即时定位与地图构建slam视觉雷达获取目标对象的颜色数据、影像数据和热源信息,并对颜色数据、影像数据和热源信息进行融合,获取三维建模数据;
15、第三获取模块,用于基于四元数算法对位置信息和三维建模数据进行融合,获取旋转视角下的目标定位数据和目标地图数据;
16、定位导航模块,用于基于目标定位数据和目标地图数据进行点位识别和定位建图,以进行井下巷道的定位导航。
17、为达上述目的,本公开第三方面实施例提出了一种电子设备,包括:
18、至少一个处理器;以及
19、与至少一个处理器通信连接的存储器;其中,
20、存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行本公开第一方面实施例中提供的基于超宽带的井下巷道的定位导航方法。
21、为达上述目的,本公开第四方面实施例提出了一种计算机可读存储介质,其上存储有计算机指令,其中,计算机指令用于使计算机执行根据本公开第一方面实施例中提供的基于超宽带的井下巷道的定位导航方法。
22、为达上述目的,本公开第五方面实施例提出了一种计算机程序产品,包括计算机程序,计算机程序在被处理器执行时实现本公开第一方面实施例中提供的基于超宽带的井下巷道的定位导航方法。
技术特征:
1.一种基于超宽带的井下巷道的定位导航方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于即时定位与地图构建slam视觉雷达获取所述目标对象的颜色数据、影像数据和热源信息,并对所述颜色数据、所述影像数据和所述热源信息进行融合,获取三维建模数据,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于四元数算法对所述位置信息和所述三维建模数据进行融合,获取旋转视角下的目标坐标定位数据和目标地图数据,包括:
4.根据权利要求1-3任一项所述的方法,其特征在于,所述基于所述目标定位数据和所述目标地图数据进行点位识别和定位建图,以进行井下巷道的定位导航,包括:
5.根据权利要求4所述的方法,其特征在于,更新后的所述环境栅格地图用于多种业务,包括地图漫游业务、精确定位业务、轨迹路线查询业务和地图工具业务。
6.一种基于超宽带的井下巷道的定位导航装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述第二获取模块,还用于:
8.根据权利要求7所述的装置,其特征在于,所述第三获取模块,还用于:
9.根据权利要求6-8任一项所述的装置,其特征在于,所述定位导航模块,还用于:
10.一种电子设备,包括:
技术总结
本公开提出了一种基于超宽带的井下巷道的定位导航方法及其装置,涉及定位导航技术领域。包括:基于超宽带双向飞行测距法和卡尔曼惯性递推算法进行步长及方向搜索,获取目标对象在井下巷道的位置信息;基于即时定位与地图构建SLAM视觉雷达获取目标对象的颜色数据、影像数据和热源信息,并对颜色数据、影像数据和热源信息进行融合,获取三维建模数据;基于四元数算法对位置信息和三维建模数据进行融合,获取旋转视角下的目标定位数据和目标地图数据;基于目标定位数据和目标地图数据进行点位识别和定位建图,以进行井下巷道的定位导航。本公开中,可以帮助解决煤矿井下UWB定位技术的数据丢失,改善数据卡顿延迟,实现煤矿SLAM视觉雷达实时导航定位。
技术研发人员:田原,李起伟,张子良,李超,袁晶丽,朱文硕
受保护的技术使用者:煤炭科学技术研究院有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!