一种基于机械臂控制的静电测试方法及测试系统与流程
本发明属于电子产品静电测试领域,尤其涉及一种基于机械臂控制的静电测试方法及测试系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、电子产品的静电测试对于保障产品的稳定运行起到至关重要的作用,目前,现有的测试方法中,主要以手工测试方法为主。此方式下,测试一款产品,往往需要较久的测试时间,且测试过程中无法脱离人工,大量的占用了测试人力;同时,对于进行该类测试的人员来说,其体力消耗也相对较大。
3、发明人发现,公开专利号为cn202222282193.7,专利名称为《一种电子产品防静电测试装置》中描述了一种通过控制机械臂的方式实现的一种静电测试装置,上述方法中的不足之处在于:
4、1、自动化替代程度较低,完成单点位测试后,需要人工干预调整,方可进行下一点位的测试;
5、2、无法自动判断测试结果,测试过程中依旧无法脱离人工;
6、3、测试过程中没有反馈,无法及时根据测试过程中设备的状态进行对应调整。
技术实现思路
1、为了解决上述背景技术中存在的至少一项技术问题,本发明提供一种基于机械臂控制的静电测试系统,其采用了硬件+软件的控制系统,以实现对于静电测试的全流程全自动监管。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种基于机械臂控制的静电测试方法,包括如下步骤:
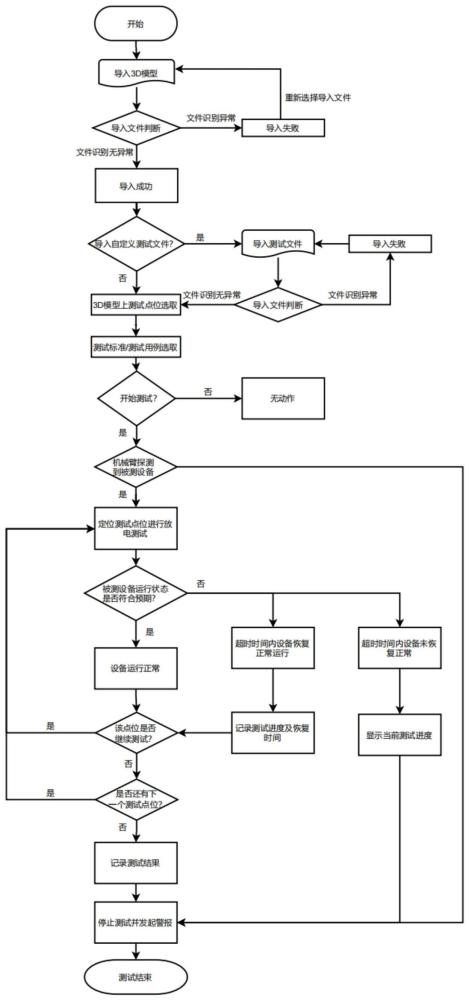
4、导入被测设备的3d模型及测试用例;
5、在导入的3d模型上进行对应的测试点位标注,选定标注点位后,对不同点位设置对应的测试用例;
6、控制机械臂移动至被测设备的3d模型中标注的测试点位,施加静电干扰,对被测设备进行测试;
7、根据对应的测试用例,判断被测设备当前运行状态是否符合预期,若符合,设备运行正常,则继续对该点位进行下一次测试,完成设定次数的测试后,进行下一点位的测试,直至完成所有点位的测试,并记录测试结果。
8、进一步地,所述方法还包括:根据对应的测试用例,判断待测设备在施加静电干扰后的运行情况,根据待测设备的运行情况,进行相应的处理。
9、进一步地,所述根据对应的测试用例,判断待测设备在施加静电干扰后的运行情况,根据待测设备的运行情况,进行相应的处理,具体包括:
10、若待测设备为非通信类产品,通过检测其在测试中,工作电流是否稳定在正常的区间内,如果是,则测试产品依旧正常运行,继续执行后续的测试;
11、若待测设备为通信类产品,通过检测其在测试后,工作电流是否依旧稳定在正常的区间,同时在测试中,其输入输出的信号是否符合预期,若符合,则测试产品依旧正常运行,继续执行后续的测试,若不符合上述的预期,开始进行设定的超时计时,如在超时时间内,测试产品恢复,则系统继续执行后续测试;如在超时时间内,设备未能恢复正常,则系统暂停测试,并报警。
12、进一步地,所述控制机械臂移动至被测设备的3d模型中标注的测试点位的过程包括:
13、确定被测设备在测试台的基准点位;
14、将实际被测设备的摆放方式映射为3d模型,放置在确定好的基准点位;
15、在3d模型上确定测试点位和测试方法;
16、通过对3d模型的操纵,计算机械臂最终点位的定位信息以及计算机械臂的位移方式;
17、将定位信息和位移方式结合后驱动机械臂进行位移寻找测试点位。
18、本发明的第二个方面提供一种基于机械臂控制的静电测试系统,包括:
19、配置文件导入模块,用于导入被测设备的3d模型及测试用例;
20、测试点位选取模块,用于在导入的3d模型上进行对应的测试点位标注,选定标注点位后,对不同点位设置对应的测试用例;
21、机械臂控制模块,用于控制机械臂移动至被测设备的3d模型中标注的测试点位,施加静电干扰,对被测设备进行测试;
22、静电测试模块,根据对应的测试用例,判断被测设备当前运行状态是否符合预期,若符合,设备运行正常,则继续对该点位进行下一次测试,完成设定次数的测试后,进行下一点位的测试,直至完成所有点位的测试,并记录测试结果。
23、进一步地,所述系统还包括测试反馈模块,所述测试反馈模块用于根据对应的测试用例,判断待测设备在施加静电干扰后的运行情况,根据待测设备的运行情况,进行相应的处理。
24、进一步地,所述测试反馈模块用于根据对应的测试用例,判断待测设备在施加静电干扰后的运行情况,根据待测设备的运行情况,进行相应的处理,具体包括:
25、若待测设备为非通信类产品,通过检测其在测试中,工作电流是否稳定在正常的区间内,如果是,则测试产品依旧正常运行,继续执行后续的测试;
26、若待测设备为通信类产品,通过检测其在测试后,工作电流是否依旧稳定在正常的区间,同时在测试中,其输入输出的信号是否符合预期,若符合,则测试产品依旧正常运行,继续执行后续的测试,若不符合上述的预期,开始进行设定的超时计时,如在超时时间内,测试产品恢复,则系统继续执行后续测试;如在超时时间内,设备未能恢复正常,则系统暂停测试,并报警。
27、进一步地,机械臂控制模块中,所述控制机械臂移动至被测设备的3d模型中标注的测试点位的过程包括:
28、确定被测设备在测试台的基准点位;
29、将实际被测设备的摆放方式映射为3d模型,放置在确定好的基准点位;
30、在3d模型上确定测试点位和测试方法;
31、通过对3d模型的操纵,计算机械臂最终点位的定位信息以及计算机械臂的位移方式;
32、将定位信息和位移方式结合后驱动机械臂进行位移寻找测试点位。
33、本发明的第三个方面提供一种计算机可读存储介质。
34、一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述所述的一种基于机械臂控制的静电测试方法中的步骤。
35、本发明的第四个方面提供一种计算机设备。
36、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述所述的一种基于机械臂控制的静电测试方法中的步骤。
37、与现有技术相比,本发明的有益效果是:
38、1、本发明完成单点位测试后,无需人工干预调整,自动完成点位的测试,通过集成测试标准,完成测试,避免因人工测试引入的测试误差。相对于传统人工测试,本测试系统中下,去除了更多的外部影响因素,测试结论更加精准,相对于传统测试方法,大幅释放人力。
39、2、通过复用产品设计阶段的结构设计图,大大简化测试点位的定位方法,通过系统的内部逻辑与硬件之间的交互,完成对测试产品测试点位的精准定位。
40、3、自动化程度相对较高的高通用性测试工装,通用性强,可通过调整系统中的各类参数,实现最终的测试效果。
41、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!