一种属性散射中心模型驱动的后门注入方法和系统
本发明涉及图像分类,尤其涉及一种属性散射中心模型驱动的后门注入方法和系统。
背景技术:
1、随着深度学习的广泛应用,发生在训练阶段的后门注入策略主要利用了神经网络模型的内部机制,通过引入细微的、人眼难以察觉的改变,诱导模型作出错误的分类或检测,对微小扰动表现出明显的脆弱性。目前后门注入策略是针对深度学习的一类新的更具威胁性的攻击范式,其保证模型在正常测试集上仍具有良好效果。然而,现有方法主要集中在光学图像上,没有考虑合成孔径雷达(synthetic aperture radar,sar)或自动目标识别(automatic target recognition,atr)系统的先验知识和sar图像获取的专业知识,导致注入效果较低。同时,现有方法多是数字攻击,而现实世界中基于雷达的攻击主要发生在物理世界,没有考虑真实场景中如目标先注入触发器再被雷达捕获并成像等情境,触发器设计不具有明显雷达特性和物理意义,导致容易被雷达捕获。现有技术中,后门注入方法有效性低、隐匿性低。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本发明实施例提供了一种属性散射中心模型驱动的后门注入方法和系统,有效地提高了有效性和隐匿性。
3、一方面,本发明实施例提供了一种属性散射中心模型驱动的后门注入方法,包括以下步骤:
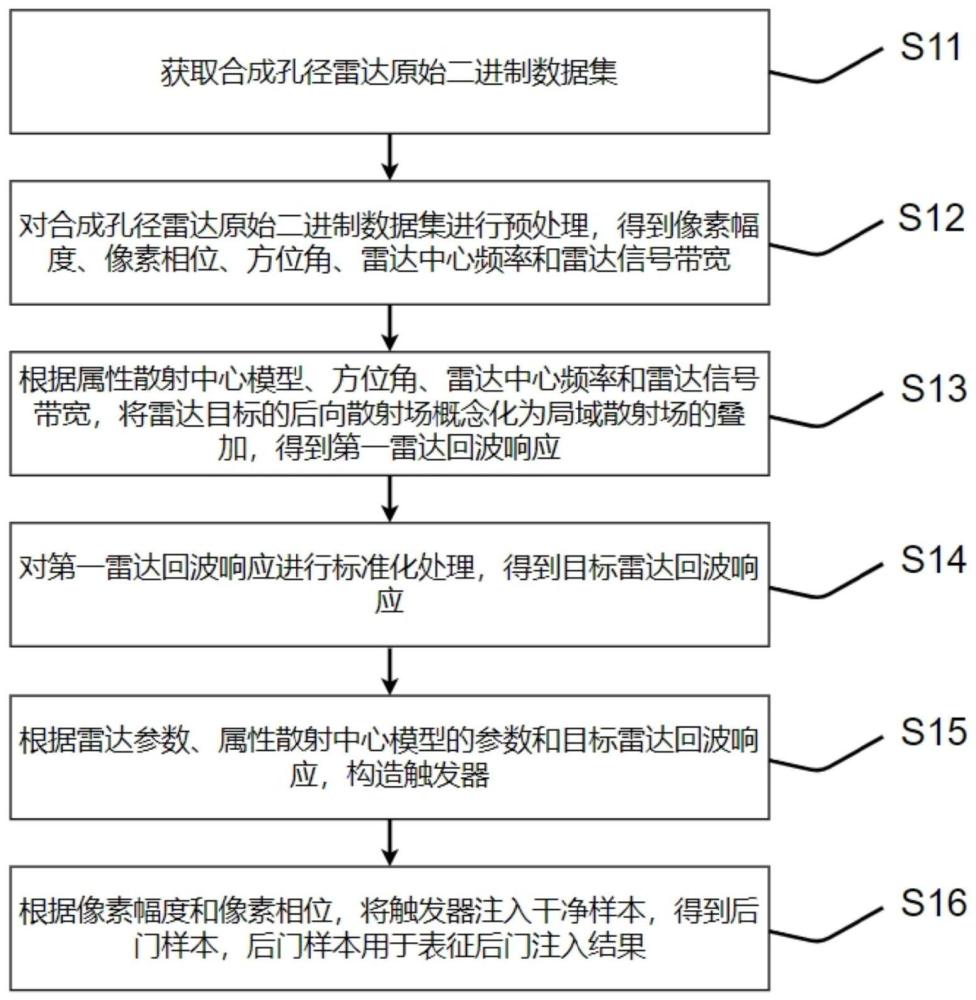
4、获取合成孔径雷达原始二进制数据集;
5、对所述合成孔径雷达原始二进制数据集进行预处理,得到像素幅度、像素相位、方位角、雷达中心频率和雷达信号带宽;
6、根据属性散射中心模型、所述方位角、所述雷达中心频率和所述雷达信号带宽,将雷达目标的后向散射场概念化为局域散射场的叠加,得到第一雷达回波响应;
7、对所述第一雷达回波响应进行标准化处理,得到目标雷达回波响应;
8、根据雷达参数、所述属性散射中心模型的参数和所述目标雷达回波响应,构造触发器;
9、根据所述像素幅度和所述像素相位,将所述触发器注入干净样本,得到后门样本,所述后门样本用于表征后门注入结果。
10、在一些实施例中,所述对所述合成孔径雷达原始二进制数据集进行预处理,得到像素幅度、像素相位、方位角、雷达中心频率和雷达信号带宽,包括:
11、根据目标类别,从所述合成孔径雷达原始二进制数据集的目标中心提取所述像素幅度和所述像素相位;
12、从所述合成孔径雷达原始二进制数据集中提取合成孔径成像时的所述方位角;
13、从所述合成孔径雷达原始二进制数据集的元数据中提取所述雷达中心频率和所述雷达信号带宽。
14、在一些实施例中,所述对所述第一雷达回波响应进行标准化处理,得到目标雷达回波响应,包括:
15、在极化平面内的散射中心,对所述第一雷达回波响应进行采样,得到第二雷达回波响应;
16、根据频率范围和角范围,将所述第二雷达回波响应采样到笛卡尔平面的矩形网格上,得到第三雷达回波响应;
17、对所述第三雷达回波响应进行归一化处理,得到所述目标雷达回波响应。
18、在一些实施例中,所述根据雷达参数、所述属性散射中心模型的参数和所述目标雷达回波响应,构造触发器,包括:
19、根据雷达参数、所述属性散射中心模型的参数和所述目标雷达回波响应,计算雷达回波频域数据;
20、对所述雷达回波频域数据进行加窗处理;
21、对加窗处理后的所述雷达回波频域数据进行补零处理,得到雷达回波数据矩阵;
22、根据预设杂波阈值,对所述雷达回波数据矩阵进行杂波滤除;
23、对杂波滤除后的所述雷达回波数据矩阵进行二维逆傅里叶变换,得到第一图像域复数数据,所述第一图像域复数数据包括散射中心幅度和散射中心相位,所述第一图像域复数数据用于表征所述触发器。
24、在一些实施例中,所述根据所述像素幅度和所述像素相位,将所述触发器注入干净样本,得到后门样本,包括:
25、根据投毒率,从训练集中选取预设数量个的干净样本;
26、根据所述干净样本中的所述像素幅度和所述像素相位,构建第一复数表达式,所述第一复数表达式包括第一实部和第一虚部;
27、根据所述触发器中所述第一图像域复数数据的所述散射中心幅度和所述散射中心相位,构建第二复数表达式,所述第二复数表达式包括第二实部和第二虚部;
28、将所述第一实部和所述第二实部相加,得到第三实部;
29、将所述第一虚部和所述第二虚部相加,得到第三虚部;
30、根据所述第三实部和所述第三虚部,计算第二图像域复数数据;
31、对所述第二图像域复数数据取绝对值,得到目标图像域复数数据;
32、通过触发器将所述目标图像域复数数据注入所述干净样本,得到所述后门样本。
33、在一些实施例中,在得到后门样本后,所述方法还包括:
34、获取待分类样本;
35、将所述待分类样本输入目标分类模型,得到分类结果;
36、其中,所述目标分类模型通过以下步骤得到:
37、获取干净样本;
38、根据模型损失函数、攻击成功率和干净样本准确度,将所述后门样本和所述干净样本输入预设分类模型,以对所述预设分类模型进行训练,得到所述目标分类模型。
39、在一些实施例中,所述目标雷达回波响应的计算公式如下:
40、
41、式中,e(fx,fy;θ)为所述目标雷达回波响应,fx为距离向上的频率,fy为方位向上的频率,a为回波的相对幅度,j为复数单位,fc为中心频率,γp为方位角依赖关系,c为电磁信号的传播速度,φm为方位角,为散射中心相对于雷达波束法线的角度,lp为像素级长度,ηy为方位向的补零操作,(xp,yp)为散射中心的像素位置,(px,py)为相邻像素之间的距离。
42、在一些实施例中,所述模型损失函数的计算公式如下:
43、
44、式中,ml为所述模型损失函数,fw为被注入的模型,w为模型参数,n为样本总数,l为交叉熵损失函数,ytarg et为目标标签,dpoisoned为训练数据集,x′为所述训练数据集中的样本,y为样本对应的标签。
45、另一方面,本发明实施例提供了一种属性散射中心模型驱动的后门注入系统,包括:
46、第一模块,用于获取合成孔径雷达原始二进制数据集;
47、第二模块,用于对所述合成孔径雷达原始二进制数据集进行预处理,得到像素幅度、像素相位、方位角、雷达中心频率和雷达信号带宽;
48、第三模块,用于根据属性散射中心模型、所述方位角、所述雷达中心频率和所述雷达信号带宽,将雷达目标的后向散射场概念化为局域散射场的叠加,得到第一雷达回波响应;
49、第四模块,用于对所述第一雷达回波响应进行标准化处理,得到目标雷达回波响应;
50、第五模块,用于根据雷达参数、所述属性散射中心模型的参数和所述目标雷达回波响应,构造触发器;
51、第六模块,用于根据所述像素幅度和所述像素相位,将所述触发器注入干净样本,得到后门样本,所述后门样本用于表征后门注入结果。
52、另一方面,本发明实施例提供了一种属性散射中心模型驱动的后门注入系统,包括:
53、至少一个处理器;
54、至少一个存储器,用于存储至少一个程序;
55、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现所述的方法。
56、本发明所具有的有益效果如下:
57、本发明首先获取合成孔径雷达原始二进制数据集,对合成孔径雷达原始二进制数据集进行预处理,得到像素幅度、像素相位、方位角、雷达中心频率和雷达信号带宽,然后将雷达目标的后向散射场概念化为局域散射场的叠加,得到第一雷达回波响应,对第一雷达回波响应进行标准化处理,得到目标雷达回波响应,再根据雷达参数、属性散射中心模型的参数和目标雷达回波响应,构造触发器,最后将触发器注入干净样本,得到后门样本,实现了图像后门注入,提高了有效性和隐匿性。
58、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!