一种轨道板裂缝检测方法
本发明涉及一种轨道板裂缝检测方法,属于轨道板裂缝检测。
背景技术:
1、轨道板是整个轨道结构的重要组成部分,直接承受着来自钢轨的载荷。现代轨道板都是在生产车间预先浇筑好轨道板然后再运输到场地进行安装,在生产的过程中会出现浇筑不密实等情况,加之轨道板长时间暴露在空气中,受到环境温度变化、列车动荷载和静荷载、雨水侵蚀等环境因素的作用,会导致轨道板表面和内部出现各种各样的裂缝,对列车的安全运行存在着极大的威胁,所以有必要对轨道板进行裂缝检测。
2、传统轨道板的裂缝检测手段主要是人工观察,受制于天气情况的变化,效率低、速度慢,一旦发现不及时,就有造成重大危险损失的可能。超声检测技术由于具有能量传播迅速、穿透性强、安全监测等优点,近年来广泛应用于各种材料的无损检测中。
3、中国专利cn202010176415.x公开了一种在役叶片损伤检测机器人,该检测机器人包括损伤探测系统,其中,损伤探测系统包括相机模块,拍摄叶片表面;相控阵超声模块,检测叶片内部损伤。检测的时候,通过机器视觉技术对摄像设备采集的视频数据辨识,并对叶片表面裂纹、腐蚀等损伤进行坐标定位及数据存储;相控阵超声模块面扫描模式能够采集并存储叶片内部三维结构数据,并通过机器学习算法提高超声成像结果中叶片损伤自动识别及定位的准确率准。
4、中国专利cn202310724531.4公开了一种在役风电叶片主梁隐患检测机器人及其检测方法,检测机器人中设有、曲面自适应相控阵超声扫查结构和相机检测系统,其中,所述的曲面自适应相控阵超声扫查结构包括曲面自适应单元和用于检测叶片主梁内部缺陷的相控阵超声探头,在曲面自适应单元作用下,保证相控阵超声探头在曲面上移动时保持垂直检测面,并紧贴所述检测面;所述相机检测系统包括无人机主体摄像头和安装在轮式移动底盘下方车体相机模块,所述无人机主体摄像头用于检测机器人运行方向的环境信息,所述车体相机模块用于检测曲面自适应相控阵超声扫查结构工作情况和叶片表面的损伤。
5、混凝土裂缝受外载荷形式的不同可以分为三类,即ⅰ型(张开型)、ⅱ型(滑移型)和ⅲ型(撕裂型),轨道板中常见的裂缝属于i-ii复合型。轨道板裂缝自身的特性,导致采用超声相控阵技术对轨道板裂缝进行检测时会有盲区,致使成像效果不佳,检测结果不够准确。
技术实现思路
1、针对现有技术存在的上述问题,本发明的目的是提供一种轨道板裂缝检测方法。
2、为实现上述目的,本发明采用如下技术方案:
3、一种轨道板裂缝检测方法,包括如下步骤:
4、s1、将轨检小车行驶至待检测轨道板的钢轨上,所述轨检小车的前端设有高度可调的相机,所述相机的下方设有超声相控阵传感器,所述轨检小车上设有光电编码器,所述相机、超声相控阵传感器、光电编码器分别信号连接有计算机;
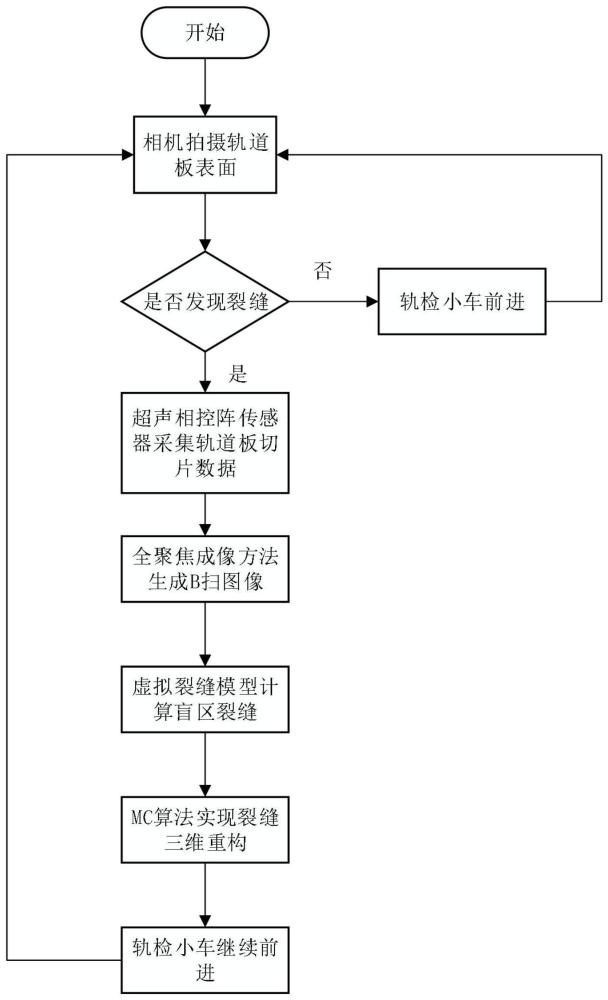
5、s2、随着轨检小车的移动,相机对轨检小车前方的轨道板表面进行连续拍摄,并将拍摄的图片传给计算机,光电编码器实时采集轨检小车车轮的运动量,并将采集的车轮运动量信息传递给计算机;
6、s3、计算机根据车轮运动量信息计算出轨道板裂缝的相对位置,根据相机拍摄的图片获得轨道板裂缝的绝对位置,结合轨道板裂缝的相对位置和绝对位置计算出轨道板裂缝的地理位置;
7、s4、当相机拍摄的图片显示轨道板表面存在裂缝时,开始进行超声相控阵传感器检测,超声相控阵传感器的发射端按照相同的距离间隔,依次垂直于轨道板激发出超声波至轨道板内部,再由超声相控阵传感器的接收端接收轨道板内部反射的声场信号,形成每个切片截面的全矩阵数据,并将每个切片截面全矩阵数据传给计算机;
8、s5、计算机对超声相控阵传感器采集到的轨道板每个切片数据进行处理,形成每个切片的二维检测成像,并结合虚拟裂缝模型对盲区裂缝进行预测,形成一幅完整的含有轨道板裂缝的切片图像,然后对所有切片图像进行等值面提取和插值计算,得到完整的轨道板内部裂缝的三维成像,实现轨道板裂缝的可视化检测。
9、一种实施方案,所述步骤s2中,所述相机垂直于轨道板拍摄。
10、一种实施方案,所述步骤s3包括如下操作:
11、s31、计算机对相机拍摄到的带有裂缝的图片进行预处理并提取裂缝特征:计算机先依次对相机拍摄到的带有裂缝的图片进行图像灰度化、图像滤波、图像增强和图像二值化预处理,然后对预处理后的图片进行提取裂缝特征,其中,图像增强处理是指运用直方图均衡化算法对图像进行增强处理:
12、
13、式(1)中:sk是均衡化后各像素的灰度级,n是图像中像素的总和,nj是当前灰度级的像素个数,l是图像中的灰度级总数,k是图像中的灰度级数,j是图像中的灰度级数索引,j=0,1,2...k;
14、s32、通过ssd目标检测算法对提取出的图像中的裂缝特征进行检测和分类,实现轨道板表面的裂缝检测,并标记出裂缝的所在位置,此位置即为裂缝的地理位置。
15、一种实施方案,所述步骤s3中,采用中值滤波法进行图像滤波处理。
16、一种实施方案,所述步骤s4中,超声相控阵传感器的发射端按照相同的距离间隔,依次垂直于轨道板激发出中心频率为50khz的超声波至轨道板内部。
17、一种实施方案,所述步骤s5包括如下操作:
18、s51、计算机采用全聚焦成像算法对超声相控阵传感器采集到的轨道板每个切片截面的全矩阵数据进行处理,得到每个切片的二维检测成像;
19、s52、对所有的切片截面二维检测图像进行切边、二值化和灰度预处理,得到裂缝清晰的轮廓信息;
20、s53、运用结构工程中的虚拟裂缝模型对轨道板盲区裂缝进行预测:混凝土裂缝受外载荷形式的不同可以分为三类,即ⅰ型(张开型)、ⅱ型(滑移型)和ⅲ型(撕裂型),轨道板中的裂缝属于i-ii复合型,混凝土i-ii型裂缝扩展准则认为:在裂缝的扩展过程中,外载荷作用下试件裂缝尖端的应力强度因子与虚拟裂缝粘聚力作用下裂缝尖端处的应力强度因子之差等于i-ii复合型裂缝起裂韧度时,裂缝处于扩展的临界状态;将混凝土i-ii型裂缝扩展准则与最大周向应力准则相结合,得到试件的起裂方程如下:
21、
22、其中:
23、
24、式(2)和式(3)中:和分别为外载荷p和粘聚力σ作用下裂缝尖端ⅰ型和ⅱ型应力强度因子;θ为起裂角;表示为混凝土i型的起裂韧度;
25、在裂缝的扩展过程中,裂缝沿着裂缝尖端处主拉应变的方向扩展,裂缝扩展角α0由下式计算:
26、
27、式(4)中:α0为裂缝扩展角,γxy、εx、εy分别为在载荷作用下裂缝尖端处的剪应变、x和y方向的正应变;
28、设定初始裂缝长度a0和步长δa,向式(4)中代入轨道板的材料参数和轨道板所受到的某一时刻的载荷,求得裂缝扩展角,可以求得第一步的裂缝扩展方向;再代入下一时刻的轨道板所受外载荷,重复计算以上过程,就可以得到盲区部分轨道板裂缝的轨迹,进而实现盲区裂缝预测,具体过程如下:
29、在已经预处理的切片图像中,在表示检测区与盲区交界处的裂缝处,从上往下依次选取两行表示裂缝的像素网格,并分别取其中间位置的像素网格,记为(x0,y0),(x1,y1),计算它们之间的距离,作为初始裂缝长度a0,即:
30、
31、计算步长δa为:
32、
33、式(6)中,δx、δy分别为划分的像素网格的尺寸;
34、根据初始裂缝长度a0和步长δa以及计算得的裂缝扩展角α0,可以算得第一步的扩展路径,计算扩展路径与周围像素网格点的距离,选取距离最近的一个点作为新的裂缝的中心位置,其裂缝以中心位置左右对称分布,宽度为初始裂缝的宽度,每一步能够预测的长度为一个网格长度,在下一步中将新预测的裂缝的中心位置(x2,y2)与(x1,y1)之间的距离作为新的初始裂缝长度a1,结合步长δa和新的裂缝扩展角α1进行下一步的预测,经过n次迭代,最终得到(xn,yn)的位置,以及其裂缝宽度,到达图像的最顶端结束,表示轨道板的表面的裂缝分布情况;
35、s54、以每张图像的位置信息为参考,在matlab软件中对图像进行等值面提取和插值计算,实现对缺陷的空间三维成像,其操作如下:
36、每次选取两个切片层截面图像,在图像中选取相应的两个小方格组成体素,对每一个体素进行等值面计算,依次完成所有的切片层的等值面处理,等值面即为空间中所有具有相同灰度值大小的点的集合,该等值面为一个连续的三维曲面,建立曲面方程f(x,y,z),设定某个灰度值g,则等值面方程满足下式:
37、f(x,y,z)=g (7);
38、式(7)中,f(x,y,z)为所有灰度值点相等的曲面方程;
39、通过计算各体素顶点坐标对应的函数值,逐个判断体素中各顶点与等值面的关系,再运用插值公式在体素边界上进行插值计算,计算出体素内某点的灰度值信息,插值公式如下:
40、g(x,y,z)=a0+a1x+a2y+a3z+a4xy+a5yz+a6xz+a7xyz (8);
41、式(8)中:a0~a7为体素中各顶点的系数,x、y、z为各体素顶点坐标,当所求等值面为一固定值时,即g(x,y,z)=g0时,g0为等值面常数值,由公式(8)可计算出等值面与体素每个面的交线,则边界所在方程为z=z0,z0为等值面与体素每个面的交线所在边界值,从而得到:
42、b1+b2x+b3y+b4xy=g0 (9);
43、其中,b1、b2、b3、b4分别如下:
44、
45、式(9)和(10)中,b1、b2、b3、b4分别为等值面中各体素点的系数;
46、如此,通过等值面处理和插值计算,计算出所有体素内的灰度值,完成三维重构,得到完整的轨道板裂缝三维成像,通过三维成像即可实现轨道板裂缝的可视化检测。
47、一种实施方案,所述超声相控阵传感器包括相控阵探头支架和安装于相控阵探头支架上的超声相控阵探头,所述超声相控阵探头与计算机信号连接。
48、一种优选方案,所述超声相控阵探头为干耦合超声相控阵探头。
49、一种实施方案,所述相机为ccd工业相机。
50、一种实施方案,所述相机的周围设有环形光源。
51、一种实施方案,所述轨检小车的前端连接有高度可调的相机支架,所述相机安装于相机支架的上端,所述超声相控阵传感器安装于相机支架的下端。
52、一种实施方案,所述轨检小车上设有移动电源。
53、一种实施方案,所述轨检小车的车身底部设有用于驱动轨检小车车轮转动的驱动电机,所述光电编码器设于驱动电机的电机轴上。
54、一种实施方案,所述轨检小车上设有超声激励源,所述超声激励源分别与计算机和超声相控阵传感器信号连接,所述计算机控制超声激励源激发并由超声相控阵传感器的发射端垂直于轨道板发出超声波至轨道板内部。
55、一种实施方案,所述轨检小车上设有数据采集控制器,所述数据采集控制器分别与计算机和光电编码器信号连接,所述光电编码器利用其码盘的转动生成脉冲电信号,生成的脉冲电信号通过数据采集控制器传输到计算机中,实现轨检小车车轮运动量的采集。
56、相较于现有技术,本发明的有益技术效果在于:
57、本发明提供的轨道板裂缝检测方法,可以实现对于轨道板的实时、自动化、全方位检测,检测过程不易受到环境的影响,得到的轨道板裂缝三维成像能够呈现出轨道板内外部的完整裂缝,克服了超声检测轨道板表面盲区的问题,成像结果更加准确,检测精度高,相对于现有技术,具有显著的创新性和应用价值。
- 还没有人留言评论。精彩留言会获得点赞!