传感器单元、移动体定位装置、系统及移动体的制作方法
本发明涉及惯性测量装置等。
背景技术:
1、已知有例如专利文献1~3所公开那样的具备三轴角速度传感器和三轴加速度传感器的各种惯性测量装置。
2、在以往的惯性测量装置中,测定侧倾角的角速度传感器、测定俯仰角的角速度传感器、以及测定偏摆角的角速度传感器使用仅设置朝向不同但相同规格的角速度传感器。因此,各角速度传感器的测定误差为相同程度。
3、在将包括惯性测量装置的定位系统装备于移动体的情况下,若针对由角速度传感器测定的移动体的侧倾角、俯仰角、偏摆角各自的测定值,所要求的精度为相同程度则没有问题。但是,在实际上获得以下发现,即希望偏摆角的测定值精度高于侧倾角和俯仰角。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2012-251803号公报
7、专利文献2:日本特开2014-228489号公报
8、专利文献3:日本特开2017-20829号公报。
技术实现思路
1、基于该发现设计了本发明。
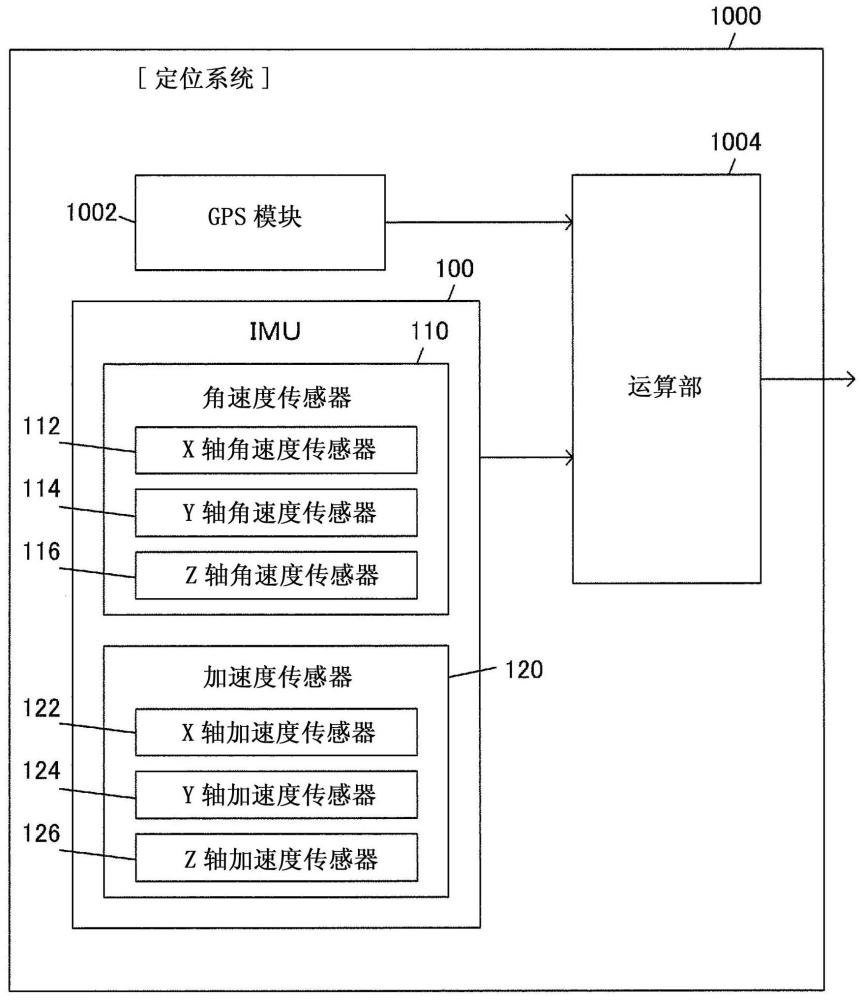
2、用于解决上述课题的第一发明是在装备于移动体的定位系统中与按每t秒输出定位结果的卫星定位用接收机组合使用的惯性测量装置,在将上述移动体的前后方向设为x轴,将上述移动体的左右方向设为y轴,将与上述x轴和上述y轴正交的方向设为z轴时,具备:检测绕上述x轴的角速度并输出第一角速度信号的x轴角速度传感器;检测绕上述y轴的角速度并输出第二角速度信号的y轴角速度传感器;检测绕上述z轴的角速度并输出第三角速度信号的z轴角速度传感器;检测上述x轴方向的加速度并输出第一加速度信号的x轴加速度传感器;检测上述y轴方向的加速度并输出第二加速度信号的y轴加速度传感器;以及检测上述z轴方向的加速度并输出第三加速度信号的z轴加速度传感器,在上述z轴角速度传感器中,上述移动体以移动速度vm/秒进行t秒钟移动期间的基于上述第三角速度信号的位置误差p[m]满足pp≥p=(v/bz)×(1-cos(bz×t))(其中,上述第三角速度信号的偏差误差为bz[deg/秒],t秒钟移动期间的规定的允许最大位置误差为pp[m]),上述x轴角速度传感器的上述第一角速度信号的偏差误差bx[deg/秒]满足bz<bx,上述y轴角速度传感器的上述第二角速度信号的偏差误差by[deg/秒]满足bz<by。
3、根据第一发明,z轴角速度传感器的偏差误差bz相对于x轴角速度传感器的偏差误差bx以及y轴角速度传感器的偏差误差by较小,因此成为偏摆角的绕z轴的角速度能够以比成为侧倾角的绕x轴的角速度以及成为俯仰角的绕y轴的角速度更高的精度获得。z轴角速度传感器的偏差误差bz是使移动体在基于卫星定位用接收机的定位结果的输出间隔亦即t秒移动期间的位置误差成为规定的允许最大位置误差pp以下的值。因此,在作为与卫星定位用接收机组合而成的定位系统而装备于移动体时,能够确保使卫星定位用接收机的定位结果的输出间隔亦即t秒钟的位置误差成为规定的允许最大位置误差以下那样的惯性导航的精度。
4、对于第二发明的惯性测量装置而言,在第一发明中,满足bz<0.5×bx且bz<0.5×by。
5、根据第二发明,能够使z轴角速度传感器的偏差误差bz、x轴角速度传感器的偏差误差bx、y轴角速度传感器的偏差误差by成为各自的0.5倍以下。
6、第三发明是在装备于移动体的定位系统中使用的惯性测量装置,在将上述移动体的前后方向设为x轴,将上述移动体的左右方向设为y轴,将与上述x轴和上述y轴正交的方向设为z轴时,具备:检测绕上述x轴的角速度并输出第一角速度信号的x轴角速度传感器;检测绕上述y轴的角速度并输出第二角速度信号的y轴角速度传感器;检测绕上述z轴的角速度并输出第三角速度信号的z轴角速度传感器;检测上述x轴方向的加速度并输出第一加速度信号的x轴加速度传感器;检测上述y轴方向的加速度并输出第二加速度信号的y轴加速度传感器;以及检测上述z轴方向的加速度并输出第三加速度信号的z轴加速度传感器,在将上述x轴角速度传感器的上述第一角速度信号的艾伦方差设为bisx[deg/小时],将上述y轴角速度传感器的上述第二角速度信号的艾伦方差bisy设为[deg/小时],将上述z轴角速度传感器的上述第三角速度信号的艾伦方差设为bisz[deg/小时]时,满足bisz<0.5×bisx且bisz<0.5×bisy。
7、根据第三发明,z轴角速度传感器的艾伦方差bisz相对于x轴角速度传感器的艾伦方差bisx、y轴角速度传感器的艾伦方差bisy而较小,因此偏摆角的测定值能够以比侧倾角、俯仰角更高的精度获得。另外,能够使z轴角速度传感器的艾伦方差bisz、x轴角速度传感器的艾伦方差bisx、y轴角速度传感器的艾伦方差bisy成为不足各自的0.5倍。
8、对于第四发明的惯性测量装置而言,在第三发明中,满足bisx>5、bisy>5且bisz<2.5。
9、根据第四发明,能够使z轴角速度传感器的艾伦方差bisz不足2.5[deg/小时],使x轴角速度传感器的艾伦方差bisx、y轴角速度传感器的艾伦方差bisy超过5[deg/小时]。
10、对于第五发明的惯性测量装置而言,在第一~第四发明任一个中,满足bx>1140[deg/小时]、by>1140[deg/小时]且bz<570[deg/小时]。
11、根据第五发明,能够使z轴角速度传感器的偏差误差bz不足570[deg/小时],使x轴角速度传感器的偏差误差bx以及y轴角速度传感器的偏差误差by超过1140[deg/小时]。
12、对于第六发明的惯性测量装置而言,在第一~第五发明任一个中,上述x轴角速度传感器具有ngx个传感器元件而构成,上述y轴角速度传感器具有ngy个传感器元件而构成,上述z轴角速度传感器具有ngz个传感器元件而构成,并满足ngz>ngx且ngz>ngy。
13、根据第六发明,通过由比x轴角速度传感器以及y轴角速度传感器多的个数的传感器元件构成z轴角速度传感器,从而能够构成为z轴角速度传感器的偏差误差bz相对于x轴角速度传感器以及y轴角速度传感器的偏差误差bx、by而变小。
14、对于第七发明的惯性测量装置而言,在第六发明中,满足ngz≥2。
15、根据第七发明,能够构成为使z轴角速度传感器具有2[个]以上传感器元件。
16、作为z轴角速度传感器的结构,例如能够采用第八发明。即,对于第八发明的惯性测量装置而言,在第一~第七发明任一个中,在由水晶的电轴、机械轴以及光学轴构成的正交坐标系中,上述z轴角速度传感器包括:具有沿着由上述电轴和上述机械轴规定的平面的主面的基部;从上述基部开始,一个臂朝向上述机械轴的正方向延伸、另一个臂朝向上述机械轴的负方向延伸的一对检测用振动臂;从上述基部开始,一个臂朝向上述电轴的正方向延伸、另一臂朝向上述电轴的负方向延伸的一对连结臂;从上述各连结臂开始,一个臂朝向上述机械轴的正方向延伸、另一个臂朝向上述机械轴的负方向延伸的各一对驱动用振动臂;从上述基部开始延伸的至少两根梁;以及与上述各梁的末端部连接的支承部,作为各上述梁的一个的、由水晶构成的第一梁从上述基部的外缘延伸,上述基部的外缘处于位于上述电轴方向上比上述基部靠正侧的上述连结臂和位于上述机械轴方向上比上述基部靠正侧的上述检测用振动臂之间,上述第一梁包括:从上述基部开始,向上述电轴的正方向延伸的第一延伸部;从上述第一延伸部开始向上述机械轴的正方向延伸的第二延伸部;以及从上述第二延伸部开始,向上述电轴的负方向延伸的第三延伸部。
17、对于第九发明的惯性测量装置而言,在第八发明中,上述x轴角速度传感器以及上述y轴角速度传感器是si-mems型角速度传感器,上述x轴加速度传感器、上述y轴加速度传感器以及上述z轴加速度传感器是si-mems型加速度传感器。
18、根据第九发明,通过使x轴角速度传感器以及y轴角速度传感器成为si-mems型角速度传感器,使x轴加速度传感器、y轴加速度传感器以及z轴加速度传感器成为si-mems型加速度传感器,从而与z轴角速度传感器比较能够成为低成本。
19、对于第十发明的惯性测量装置而言,在第九发明中,还具备容器,该容器收容上述x轴角速度传感器、上述y轴角速度传感器、上述x轴加速度传感器、上述y轴加速度传感器以及上述z轴加速度传感器。
20、根据第十发明,能够将x轴角速度传感器、y轴角速度传感器、x轴加速度传感器、y轴加速度传感器以及z轴加速度传感器收容于容器而封装化。
21、对于第十一发明的惯性测量装置而言,在第一~第十发明任一个中,上述第一角速度信号以及上述第一加速度信号成为上述移动体的侧倾角的计算基准信号,上述第二角速度信号以及上述第二加速度信号成为上述移动体的俯仰角的计算基准信号。
22、根据第十一发明,由x轴角速度传感器以及y轴角速度传感器单独测定的侧倾角以及俯仰角与偏摆角比较而成为较低的精度,但通过使x轴加速度传感器以及y轴加速度传感器的加速度信号成为基准信号,从而能够与不使用这些基准信号的情况相比以高精度获得侧倾角以及俯仰角。
23、第十二发明是移动体,其具备:第一~第十一发明中任一个惯性测量装置;和控制部,其基于上述惯性测量装置的输出信号来控制加速、制动以及转向操纵中的至少一个,基于上述惯性测量装置的输出信号来切换实施或不实施自动驾驶。
24、根据第十二发明,能够高品质地进行移动体的自动驾驶。
25、第十三发明是便携式电子设备,其具备:具有开口部的壳体;收容于上述壳体内的第一~第十一发明中任一个的惯性测量装置;收容于上述壳体内并对上述惯性测量装置的输出信号进行处理的处理部;使显示画面朝向上述开口部而被收容于上述壳体的显示部;以及堵塞上述开口部的透光性罩。
26、根据第十三发明,能够实现利用了惯性导航的便携式电子设备。
27、第十四发明是电子设备,其具备:第一~第十一发明中任一项的惯性测量装置;和控制部,其基于上述惯性测量装置的输出信号进行规定的控制。
28、根据第十四发明,能够实现利用了惯性导航的电子设备。
29、第十五发明是移动体,其具备:第一~第十一发明中任一个的惯性测量装置;和姿态控制部,其基于上述惯性测量装置的输出信号来进行姿态控制。
30、根据第十五发明,能够高品质地进行移动体的姿态控制。
- 还没有人留言评论。精彩留言会获得点赞!