基于等离子体合成射流行波驻波激励的凹腔掺混增强方法
本发明涉及主动流动控制领域,尤其涉及一种基于等离子体合成射流行波驻波激励的凹腔掺混增强方法。
背景技术:
1、超燃冲压发动机是吸气式高超声速飞行器的动力装置,典型工作马赫数在6以上。由于直接在超音速气流中组织燃烧难度非常大,该类发动机多采用凹腔作为火焰稳定器,利用凹腔内部的回流区实现油气混合物的稳定燃烧。等离子体激励器作为一种新型的主动流动控制装置,有望通过促进凹腔剪切层掺混、增加回流区面积,实现更宽广的稳定燃烧范围。在已有的工作中,研究人员多在凹腔前缘布置一组脉冲电弧等离子体激励器进行流动调控(【1】kong,y.,wu,y.,zong,h.,&guo,s.(2022).supersonic cavity shear layercontrol using spanwise pulsed spark discharge array.physics of fluids,34(5).doi:10.1063/5.0088772.【2】webb,n.,&samimy,m.(2017).control of supersoniccavity flow using plasma actuators.aiaa journal,55(10),3346-3355.doi:10.2514/1.j055720)。各个电弧激励器同步放电,以激发分离剪切层的k-h不稳定性,诱导大尺度涡结构。但是这种控制方案存在几个明显的弊端。一是“穿透性能弱”:脉冲电弧等离子体激励器对流场的扰动是热阻塞效应,受电弧等离子体加热区域限制,仅能影响距离壁面2-5mm的区域,无法穿透超音速边界层、影响到外部流动。二是“激发模态少”:沿凹腔前缘布置的单列等离子体激励器只能激发分离剪切层的二维展向不稳定模态,促进掺混效果很有限。相关研究表明,凹腔分离剪切层还存在着大量的三维不稳定模态,如果能够被外部扰动激发将会更有效的促进凹腔流动的掺混(【3】huang,x.,&zhang,x.(2008).streamwise andspanwise plasma actuators for flow-induced cavity noise control.physics offluids,20(3).doi:10.1063/1.2890448)。三是“复杂工况适应性差”:未来高超声速吸气式飞行器的飞行速域极其宽广,固定阵型的电弧等离子体激励无法根据来流状态做出优化调整。
技术实现思路
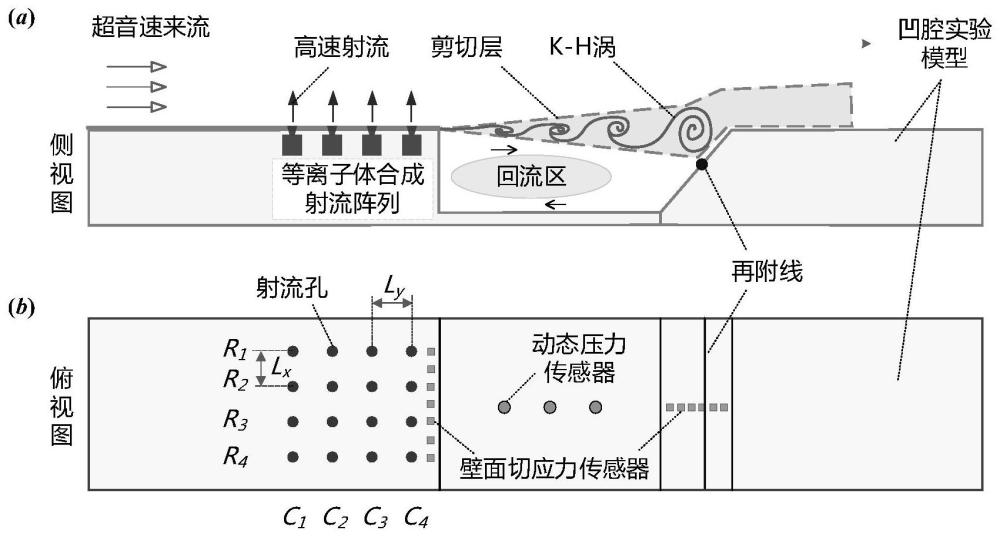
1、针对传统单列脉冲电弧控制方法穿透性能弱、激发模态少和复杂工况适应性差的问题,本发明提出采用高能等离子体合成射流阵列对凹腔进行调控,结合人工智能方法对激励参数进行自适应调整。具体提出一种用于等离子体合成射流阵列激励促进凹腔掺混增强的凹腔实验模型,该模型整体外观呈矩形体,在凹腔的上游布置有nx×ny个等离子体合成射流激励器组成的矩阵,该矩阵沿凹腔上表面的中心线方向对称布置,nx和ny分别为行数和列数;等离子体合成射流激励器埋在凹腔内部,通过靠近凹腔上表面的一个射流小孔向超音速来流施加强扰动;等离子体合成射流激励器射流的方向不做限制;并且
2、(1)在凹腔前缘的上游布置一列壁面切应力传感器,其沿凹腔上表面展向对称均匀分布,位于等离子体合成射流阵列之后,传感器在展向上的布置范围应与等离子体合成射流激励器阵列相当;
3、(2)在凹腔后立面上布置一行壁面切应力传感器,其沿凹腔后立面流向中心线均匀布置;
4、(3)在凹腔的底面沿流向中轴线布置一行动态压力传感器,动态压力传感器沿流向均匀分布。
5、在本发明的一个实施例中,射流的方向是垂直方向射流,或者是具有一定倾角和偏转角的射流。
6、在本发明的另一个实施例中,
7、激励器阵列行距lx和列距ly设置为激励器孔径的5-10倍;
8、射流孔径为d=1-3mm;
9、一列壁面切应力传感器的间距小于激励器的行距;
10、动态压力传感器的间距为20-50mm,总数为3-5个。
11、在本发明的一个具体实施例中,
12、nx=ny=4;
13、射流孔径为2mm;
14、一列壁面切应力传感器的间距为5mm;
15、壁面切应力传感器的间距为3mm;
16、动态压力传感器的总数为3个。
17、还提出一种基于等离子体合成射流行波驻波激励的凹腔掺混增强方法,其基于上述用于等离子体合成射流阵列激励促进凹腔掺混增强的凹腔实验模型,该方法原理如下:
18、矩形体上表面齐平安装在超音速风洞的实验段中,即矩形体上表面与超音速风洞的实验段内壁齐平;超音速来流经过实验模型的上表面后,在凹腔的前缘处发生流动分离,产生剪切层;剪切层的上部为超音速来流,下部为回流区;剪切层往下游发展的过程中,由于流动不稳定性会产生k-h涡;k-h涡促进了剪切层两侧不同区域流体,即超音速来流和回流的掺混,使得剪切层的宽度逐渐增加;剪切层附着在凹腔的后立面上,形成再附线;从瞬时角度讲,由于剪切层的不断脉动,再附线的位置也是不断运动的,其运动幅度越大,表明凹腔掺混越剧烈。
19、在本发明的一个实施例中,阵列内部的每一个等离子体合成射流激励器均为单独供电,放电能量、频率和相位均能够任意调节;当放电频率和能量相同时,通过对阵列不同行或者不同列的激励器施加相位调制,即可实现等离子体合成射流行波激励;具体而言,假定放电周期为td,将相邻两列激励器的相位差设置为δt=td/n,即能够实现沿流向传播的等离子体合成射流行波激励;如果将相邻两行激励器的相位差设置为δt=td/n,即能够实现沿展向传播的等离子体合成射流行波激励;此外,还能够固定等离子体合成射流激励器的放电频率和相位,对不同行或者不同列的激励器进行放电能量调制,实现等离子体合成射流驻波激励;此时,假定最大的射流速度幅值为up,第i列或者第i行激励器的射流速度应设置为ui,max=upsin(π·i/n)。
20、在本发明的另一个实施例中,在超音速凹腔流动控制中,智能等离子体合成射流阵列激励的自适应调整过程如下:
21、步骤1:随机初始化若干组激励参数并评估流动控制收益;
22、随机产生若干组激励参数组合,加载到等离子体合成射流激励阵列中;基于壁面切应力传感器阵列的输出信号τi,i=1,2,…,m,m为壁面压力传感器的总数,根据公式(1)计算出来流壁面摩擦阻力系数cf,i;基于动态压力传感器阵列的输出信号pj,j=1,2,…,n,n为动态压力传感器的总数,根据公式(2)计算出凹腔底部的压力脉动强度ip;再附点的位置xr近似表示为壁面切应力传感器阵列中最小切应力出现的位置;
23、
24、
25、其中,ρ表示气体密度,u∞表示超音速来流的速度;rms(·)表示均方根函数;
26、来流壁面摩擦阻力系数cf,i为来流的状态参数,ip、xr这两个参数为观测输出参数,反映出当前几组控制输入下的流动控制收益;具体而言,压力脉动ip越大、再附点的位置xr越靠近上游,凹腔掺混就越强烈、流动控制收益就越高;
27、步骤2:构建代理模型,借助智能寻优算法预测最佳激励参数组合;
28、构建控制输入、来流状态与观测输出的代理模型,通过智能优化算法对代理模型进行优化,寻找能够实现更高控制收益的最优激励参数组合;
29、步骤3:反向解算电源放电触发信号序列,通过迭代测试提升收益;
30、将步骤2中代理模型所预测的最优激励参数组合反向解算为电源系统的放电触发信号序列;将反向解算获得的放电触发信号加载到等离子体合成射流激励阵列上,监测超音速凹腔流动的响应;重复以上过程,直到流动控制收益e不再提升;流动控制收益为:
31、e=w1·δip+w2·δxr
32、其中,δip为激励前后压力脉动强度的增加量;δxr为激励前后再附点位置的变化量;w1和w2均为范围为0-1的权重系数。
33、在本发明的又一个实施例中,如果要实现指定频率和指定速度的等离子体合成射流行波激励,需要首先根据放电能量计算出脉冲宽度,再根据激励器列数和放电周期计算出各列激励器的放电相位差;有了脉宽、相位差和频率后即得到电源系统每一个控制端口所应该施加的重频脉冲信号。
34、本发明优点如下:
35、1、穿透深度更高:传统的脉冲电弧等离子体激励方法通过热阻塞效应对流场施加扰动,受电弧等离子体加热区域限制,仅能影响距离壁面2-5mm的区域,无法穿透超音速边界层、影响到外部流动。本发明通过超音速的等离子体合成射流对外界流场施加扰动,穿透深度能够达到10-20mm。
36、2、掺混能力更强:传统的单列等离子体激励器只能激发分离剪切层的二维展向不稳定模态,促进掺混效果极其有限。本发明方法能够实现等离子体合成射流行波和驻波激励。由于能够激发凹腔分离剪切层的三维不稳定模态、同时通过流向叠加效应提高了激励频率,因此具备更强的流动掺混能力。
37、3、适应性更好、更智能:传统的单列电弧等离子体激励方案多工作在同步触发模式,各个激励器的工作频率和相位严格一致,不具备调节能力、对复杂来流工况适应性差。本发明的等离子体合成射流阵列激励能够根据流场状态反馈自动进行参数的优化调整。与传统无反馈的控制方案相比,具有更好的适应性,更能满足超燃冲压发动机宽广工作边界下火焰稳定燃烧的需求。
- 还没有人留言评论。精彩留言会获得点赞!