一种用于多传感器协作机器人的高精度定位系统及方法
本发明属于室内定位,尤其涉及一种用于多传感器协作机器人的高精度定位系统及方法。
背景技术:
1、室内定位是指在室内环境中实现位置定位,主要采用无线通讯、基站定位、惯导定位和动作捕捉等多种技术集成形成一套室内位置定位体系,从而实现人员和物体等在室内空间中的位置监控。
2、在当前的室内定位技术中,通常采用视觉方案或者设置基站的方式进行定位,但是现有技术中提供的视觉方案或者设置通讯基站的方式难以提供高精度的室内定位效果。
技术实现思路
1、本发明的目的在于提供一种用于多传感器协作机器人的高精度定位方法,旨在解决现有技术中提供的视觉方案或者设置通讯基站的方式难以提供高精度的室内定位效果的问题。
2、本发明是这样实现的,一种用于多传感器协作机器人的高精度定位方法,所述方法包括:
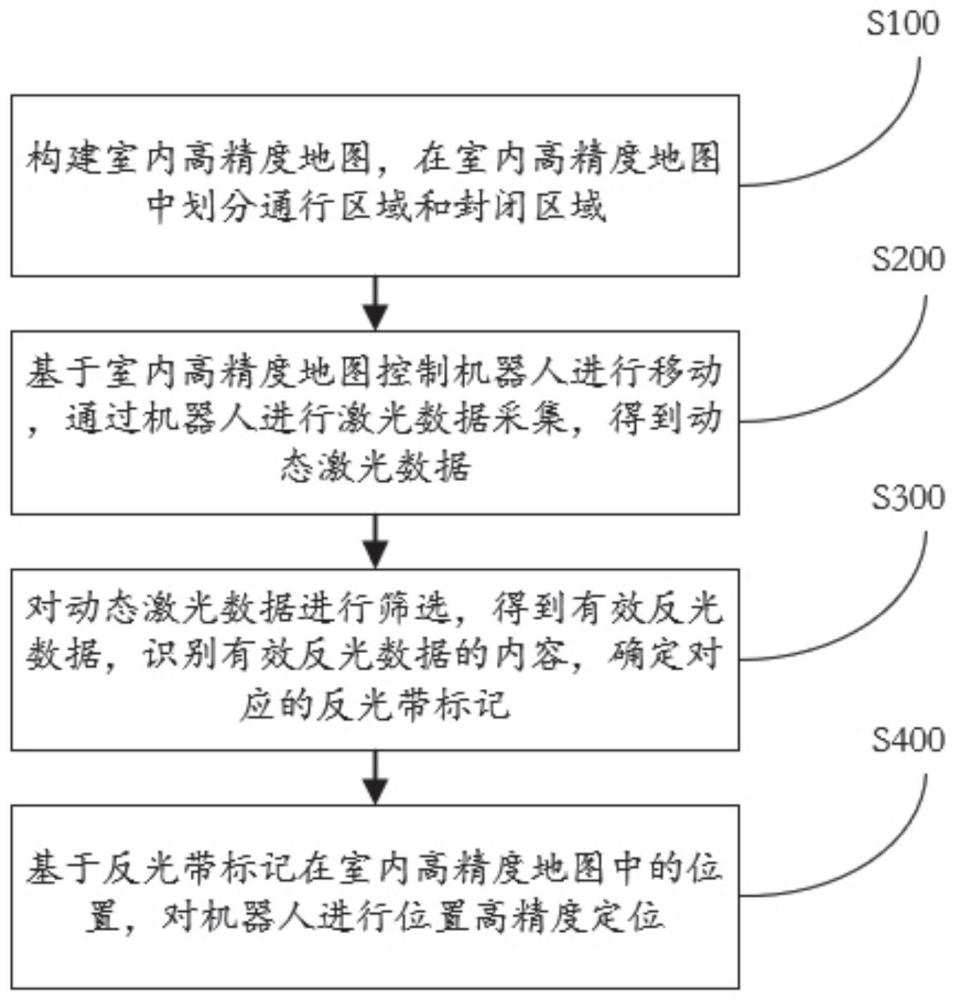
3、构建室内高精度地图,在室内高精度地图中划分通行区域和封闭区域,所述室内高精度地图中通过隔离墙对通行区域和封闭区域进行分割,所述隔离墙上设置有反光带;
4、基于室内高精度地图控制机器人进行移动,通过机器人进行激光数据采集,得到动态激光数据;
5、对动态激光数据进行筛选,得到有效反光数据,识别有效反光数据的内容,确定对应的反光带标记;
6、基于反光带标记在室内高精度地图中的位置,对机器人进行位置高精度定位。
7、优选的,所述基于室内高精度地图控制机器人进行移动,通过机器人进行激光数据采集,得到动态激光数据的步骤,具体包括:
8、接收移动指令,基于移动指令和室内高精度地图进行路径规划,得到移动路径轨迹;
9、基于移动路径轨迹控制机器人进行移动,在机器人移动的过程中,机器人向四周发送检测光线;
10、通过机器人对激光数据进行采集,基于采集得到的数据初步筛选,得到动态激光数据。
11、优选的,所述对动态激光数据进行筛选,得到有效反光数据,识别有效反光数据的内容,确定对应的反光带标记的步骤,具体包括:
12、基于设定的阈值对动态激光数据中记录的激光测距值进行筛选,得到有反光数据;
13、根据有效反光数据识别数据标定点,并提取数据标定点之间的光照强度数据,根据光照强度数据的变化转换得到数据转换文本;
14、基于数据转换文本的内容匹配室内高精度地图中对应的反光带标记对应的反光带。
15、优选的,所述基于反光带标记在室内高精度地图中的位置,对机器人进行位置高精度定位的步骤,具体包括:
16、基于室内高精度地图构建平面定位坐标系,根据有效反光数据确定机器人与当前识别到的各个反光带之间的反射距离;
17、基于各个反光带在平面定位坐标系中的位置以及反射距离,构建主动定位环线;
18、基于得到的多个主动定位环线划定定位范围,以定位范围的形心作为机器人当前的位置。
19、优选的,以定位范围的形心作为机器人当前的位置的步骤中,通过计算得到的形心坐标,其中,x为定位范围中各个点的横坐标,y为定位范围中各个点的纵坐标,a为定位范围的面积。
20、本发明的另一目的在于提供一种用于多传感器协作机器人的高精度定位系统,所述系统包括:
21、地图构建模块,用于构建室内高精度地图,在室内高精度地图中划分通行区域和封闭区域,所述室内高精度地图中通过隔离墙对通行区域和封闭区域进行分割,所述隔离墙上设置有反光带;
22、数据采集模块,用于基于室内高精度地图控制机器人进行移动,通过机器人进行激光数据采集,得到动态激光数据;
23、标记识别模块,用于对动态激光数据进行筛选,得到有效反光数据,识别有效反光数据的内容,确定对应的反光带标记;
24、高精定位模块,用于基于反光带标记在室内高精度地图中的位置,对机器人进行位置高精度定位。
25、优选的,所述数据采集模块包括:
26、轨迹规划单元,用于接收移动指令,基于移动指令和室内高精度地图进行路径规划,得到移动路径轨迹;
27、动态检测单元,用于基于移动路径轨迹控制机器人进行移动,在机器人移动的过程中,机器人向四周发送检测光线;
28、数据采集单元,用于通过机器人对激光数据进行采集,基于采集得到的数据初步筛选,得到动态激光数据。
29、优选的,所述标记识别模块包括:
30、数据筛选单元,用于基于设定的阈值对动态激光数据中记录的激光测距值进行筛选,得到有反光数据;
31、数据识别单元,用于根据有效反光数据识别数据标定点,并提取数据标定点之间的光照强度数据,根据光照强度数据的变化转换得到数据转换文本;
32、反光带匹配单元,用于基于数据转换文本的内容匹配室内高精度地图中对应的反光带标记对应的反光带。
33、优选的,所述高精定位模块包括:
34、反射距离提取单元,用于基于室内高精度地图构建平面定位坐标系,根据有效反光数据确定机器人与当前识别到的各个反光带之间的反射距离;
35、定位区间识别单元,用于基于各个反光带在平面定位坐标系中的位置以及反射距离,构建主动定位环线;
36、设备定位单元,用于基于得到的多个主动定位环线划定定位范围,以定位范围的形心作为机器人当前的位置。
37、优选的,以定位范围的形心作为机器人当前的位置的步骤中,通过计算得到的形心坐标,其中,x为定位范围中各个点的横坐标,y为定位范围中各个点的纵坐标,a为定位范围的面积。
38、本发明提供的一种用于多传感器协作机器人的高精度定位方法,通过机器人上设置的多个传感器进行同步检测,识别隔离墙上设置的反光带,从而根据反光带的编号确定反光带的位置,实现对机器人的高精度定位,上述定位方式不依赖于视觉方案或者无线通讯的方式进行定位,保证定位精度,并且大大降低了定位成本。
技术特征:
1.一种用于多传感器协作机器人的高精度定位方法,其特征在于,所述方法包括:
2.根据权利要求1所述的用于多传感器协作机器人的高精度定位方法,其特征在于,所述基于室内高精度地图控制机器人进行移动,通过机器人进行激光数据采集,得到动态激光数据的步骤,具体包括:
3.根据权利要求1所述的用于多传感器协作机器人的高精度定位方法,其特征在于,所述对动态激光数据进行筛选,得到有效反光数据,识别有效反光数据的内容,确定对应的反光带标记的步骤,具体包括:
4.根据权利要求1所述的用于多传感器协作机器人的高精度定位方法,其特征在于,所述基于反光带标记在室内高精度地图中的位置,对机器人进行位置高精度定位的步骤,具体包括:
5.根据权利要求4所述的用于多传感器协作机器人的高精度定位方法,其特征在于,以定位范围的形心作为机器人当前的位置的步骤中,通过计算得到的形心坐标,其中,x为定位范围中各个点的横坐标,y为定位范围中各个点的纵坐标,a为定位范围的面积。
6.一种用于多传感器协作机器人的高精度定位系统,其特征在于,所述系统包括:
7.根据权利要求6所述的用于多传感器协作机器人的高精度定位系统,其特征在于,所述数据采集模块包括:
8.根据权利要求6所述的用于多传感器协作机器人的高精度定位系统,其特征在于,所述标记识别模块包括:
9.根据权利要求6所述的用于多传感器协作机器人的高精度定位系统,其特征在于,所述高精定位模块包括:
10.根据权利要求9所述的用于多传感器协作机器人的高精度定位系统,其特征在于,以定位范围的形心作为机器人当前的位置的步骤中,通过计算得到的形心坐标,其中,x为定位范围中各个点的横坐标,y为定位范围中各个点的纵坐标,a为定位范围的面积。
技术总结
本发明适用于室内定位技术领域,尤其涉及一种用于多传感器协作机器人的高精度定位系统及方法,所述方法包括:构建室内高精度地图,在室内高精度地图中划分通行区域和封闭区域;控制机器人进行移动,通过机器人进行激光数据采集,得到动态激光数据;对动态激光数据进行筛选,得到有效反光数据,识别有效反光数据的内容,确定对应的反光带标记;对机器人进行位置高精度定位。本发明通过机器人上设置的多个传感器进行同步检测,识别隔离墙上设置的反光带,从而根据反光带的编号确定反光带的位置,实现对机器人的高精度定位,上述定位方式不依赖于视觉方案或者无线通讯的方式进行定位,保证定位精度,并且大大降低了定位成本。
技术研发人员:仇隽挺,景立挺,姜少飞
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!