拓扑地图的构建方法、控制方法、装置、设备及存储介质与流程
本申请涉及计算机,尤其涉及一种拓扑地图的构建方法、自移动设备的控制方法、拓扑地图的构建装置、自移动设备及计算机可读存储介质。
背景技术:
1、拓扑地图是一种由拓扑节点和拓扑关系组成的地图,由于拓扑地图能够将环境抽象为若干有拓扑关系的拓扑节点,因此可以有效减少地图数据的存储负担,同时拓扑结构使得自移动设备可以直接利用地图进行路径规划任务与场景识别任务,因此在自移动设备的工作中被广泛使用。
2、相关技术中,拓扑地图主要通过激光slam(simultaneous localization andmapping,即时定位与地图构建)构建。具体的,激光slam可以得到场景内的稠密点云,并根据稠密点云得到栅格地图,进而将栅格地图转换成拓扑地图。然而由于基于激光slam得到稠密点云时的成本较高,因此导致通过激光slam的方式构建拓扑地图成本也相对较高。
技术实现思路
1、本申请提供了一种拓扑地图的构建方法、自移动设备的控制方法、拓扑地图的构建装置、自移动设备及计算机可读存储介质,旨在基于点云地图构建语义信息更丰富的拓扑地图,且降低了拓扑地图的构建成本。
2、为实现上述目的,本申请提供一种拓扑地图的构建方法,所述方法包括:
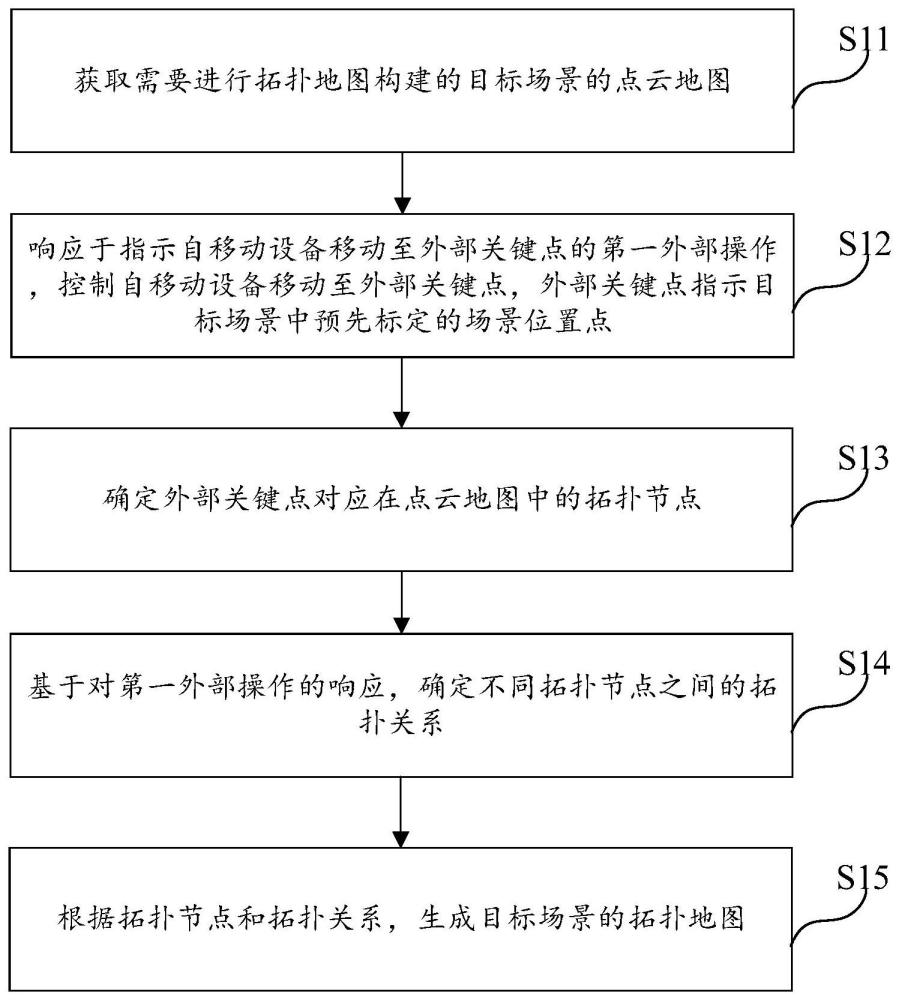
3、获取需要进行拓扑地图构建的目标场景的点云地图;
4、响应于指示自移动设备移动至外部关键点的第一外部操作,控制所述自移动设备移动至所述外部关键点,所述外部关键点指示所述目标场景中预先标定的场景位置点;
5、确定所述外部关键点对应在所述点云地图中的拓扑节点;
6、基于对所述第一外部操作的响应,确定不同拓扑节点之间的拓扑关系;
7、根据所述拓扑节点和所述拓扑关系,生成所述目标场景的拓扑地图。
8、此外,为实现上述目的,本申请还提供一种自移动设备的控制方法,所述方法包括:
9、获取目标场景的拓扑地图,所述拓扑地图根据拓扑节点和拓扑关系生成,所述拓扑节点通过确定所述目标场景中的外部关键点在所述目标场景的点云地图中的位置得到,所述拓扑关系通过响应于指示第一自移动设备移动至所述外部关键点的外部操作确定;
10、确定第二自移动设备的当前位置以及目标位置;
11、根据所述拓扑地图、所述当前位置和所述目标位置,确定所述第二自移动设备的移动路径;
12、基于所述移动路径,控制所述第二自移动设备由所述当前位置移动至所述目标位置。
13、此外,为实现上述目的,本申请还提供拓扑地图的构建装置,包括:
14、获取模块,用于获取需要进行拓扑地图构建的目标场景的点云地图;
15、移动模块,用于响应于指示所述自移动设备移动至外部关键点的外部操作,控制所述自移动设备移动至所述外部关键点,所述外部关键点指示所述目标场景中预先标定的场景位置点;
16、拓扑节点确定模块,用于确定所述外部关键点对应在所述点云地图中的拓扑节点;
17、拓扑关系确定模块,用于基于对所述第一外部操作的响应,确定不同拓扑节点之间的拓扑关系;
18、拓扑地图构建模块,用于根据所述拓扑节点和所述拓扑关系,生成所述目标场景的拓扑地图。
19、此外,为实现上述目的,本申请还提供一种自移动设备,所述自移动设备包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于执行所述的计算机程序并在执行所述的计算机程序时实现本申请实施例提供的任一项所述的拓扑地图的构建方法的步骤,以及自移动设备的控制方法的步骤。
20、此外,为实现上述目的,本申请还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现本申请实施例提供的任一项所述的拓扑地图的构建方法的步骤,以及自移动设备的控制方法的步骤。
21、本申请实施例公开的拓扑地图的构建方法、自移动设备的控制方法、拓扑地图的构建装置、自移动设备及计算机可读存储介质,能够获取需要进行拓扑地图构建的目标场景的点云地图,为后续拓扑地图的构建提供基础,实现较为清晰的场景理解。进而响应于指示自移动设备移动至外部关键点的第一外部操作,控制自移动设备移动至外部关键点,其中外部关键点指示所述目标场景中预先标定的场景位置点。进一步的,可确定外部关键点对应在点云地图中的拓扑节点,并基于对第一外部操作的响应,确定不同拓扑节点之间的拓扑关系。最后可根据拓扑节点和拓扑关系,生成目标场景的拓扑地图,由于拓扑节点以及拓扑关系,提供了目标场景中各个位置点之间的关联性信息,因此使得基于拓扑节点和拓扑关系生成的拓扑地图具备路径规划以及导航能力。相较于相关技术中使用激光slam构建拓扑地图的成本较高,本申请中能够通过上述方法基于点云地图构建得到拓扑地图,由于过程中无需使用激光slam,因此降低了拓扑地图的构建成本。
技术特征:
1.一种拓扑地图的构建方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述拓扑关系包括连接关系,所述根据所述拓扑节点和所述拓扑关系,生成所述目标场景的拓扑地图,包括:
3.根据权利要求2所述的方法,其特征在于,所述获取每一所述可通行路径的权重,包括:
4.根据权利要求1所述的方法,其特征在于,所述获取需要进行拓扑地图构建的目标场景的点云地图,包括:
5.根据权利要求4所述的方法,其特征在于,所述构建所述目标场景对应的点云地图,包括:
6.根据权利要求1至5任一项所述的方法,其特征在于,所述根据所述拓扑节点和所述拓扑关系,生成所述目标场景的拓扑地图之后,所述方法还包括:
7.一种自移动设备的控制方法,其特征在于,所述方法包括:
8.一种拓扑地图的构建装置,其特征在于,包括:
9.一种自移动设备,其特征在于,包括:存储器和处理器;其中,所述存储器与所述处理器连接,用于存储程序所述处理器用于通过运行所述存储器中存储的程序,实现如权利要求1-6中任一项所述的拓扑地图的构建方法的步骤,以及实现如权利要求7所述的自移动设备的控制方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现如权利要求1-6中任一项所述的拓扑地图的构建方法的步骤,以及实现如权利要求7所述的自移动设备的控制方法的步骤。
技术总结
本发明实施例提供一种拓扑地图的构建方法、自移动设备的控制方法、装置、自移动设备及存储介质。方法包括:获取需要进行拓扑地图构建的目标场景的点云地图;响应于指示所述自移动设备移动至外部关键点的第一外部操作,移动至所述外部关键点,所述外部关键点指示所述目标场景中预先标定的场景位置点;确定所述外部关键点对应在所述点云地图中的拓扑节点;基于对所述第一外部操作的响应,确定不同拓扑节点之间的拓扑关系;根据所述拓扑节点和所述拓扑关系,生成所述目标场景的拓扑地图。本申请旨在基于点云地图构建语义信息更丰富的拓扑地图,且降低了拓扑地图的构建成本。
技术研发人员:宫睿,吴德明,王斌
受保护的技术使用者:深圳竹芒科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!