红外成谱仪噪声等效辐亮度的分旋转角度定标方法
本发明属于光电信息获取与处理领域,更具体地,涉及一种红外成谱仪噪声等效辐亮度的分旋转角度定标方法。
背景技术:
1、红外傅里叶光谱仪是一种基于干涉式测量的光谱信息采集分析设备。它与传统色散型的红外光谱仪器相比,具有光谱识别精度高、探测信噪比高等优点,广泛应用于环境气体监测、消防安保、爆炸物检测等领域。当使用傅里叶光谱仪遥测目标时目标的红外辐射在通过大气后会发生吸收、散射等现象,环境背景信号和仪器自身的辐射信号会加载在微弱的目标信号中,显著影响对目标信号特征提取和识别的准确度。针对更远和更弱目标的探测,降低仪器自身的等效噪声或者精确表征仪器的等效噪声并予以校正,进而提高探测信噪比是目前最主要的技术途径。噪声等效辐亮度(noise equivalent spectral radiance,nesr)是该类型仪器的重要参数,它衡量了傅里叶光谱仪对目标信号探测的极限能力水平。精确标定nesr有助于提升设备的研发水平和遥测数据的定量化应用水平,决定了测量结果的可利用价值。
2、图1是现有技术提供的旋转干涉光学结构示意图,光谱探测器可以使用高速傅里叶红外光谱仪(一种旋转干涉红外成谱仪),该光谱仪采用的是旋转干涉仪(其光学结构如图1所示),内部包含一个旋转的折射镜r。
3、入射光由视场光阑fs进入,经过校正透镜lc后投射至光束分离器(分光镜)bs(半反半透),一半的光经反射至顶部的反射镜m,之后透过旋转折射镜r,最后由下方的反射镜me反射,沿原路反射至分光镜bs;
4、入射至分光镜bs的另一半光线经底部的反射镜m反射后,由旋转折射镜r透射,经上方的反射镜me反射后沿原路反射至分光镜bs;
5、两路反射后的光线在分光镜bs处重新组合(相干涉),然后经聚焦镜头lf聚焦至光谱探测器d。
6、干涉光经探测器转换为电压信号,随着旋转折射镜r的旋转,形成不同的光程差(optical path difference,opd)。一次旋转,共产生4个光程差为0的点,因此每次旋转共采集4帧干涉谱。
7、传统傅里叶红外光谱仪在进行设备噪声定标时通常采用一点或多点线性定标方法,这些方法在很大程度上提供了仪器的精准性。然而,在实际应用中,傅里叶红外光谱仪的旋转性质使得不同角度下获得的光谱数据存在一定的差异,问题仍然存在于特定角度下可能引起的系统误差,从而导致测量结果的准确性降低,现有定标方法误差较大。
技术实现思路
1、本发明提供一种红外成谱仪噪声等效辐亮度的分旋转角度定标方法,用以解决现有技术中特定角度下的系统误差导致测量结果的准确性降低的缺陷,实现分旋转角度定标,能够根据当前测量角度选择相应的定标曲线,从而更准确地校正测量数据。
2、为实现上述目的,第一方面,本发明提供一种红外成谱仪噪声等效辐亮度的分旋转角度定标方法,包括:
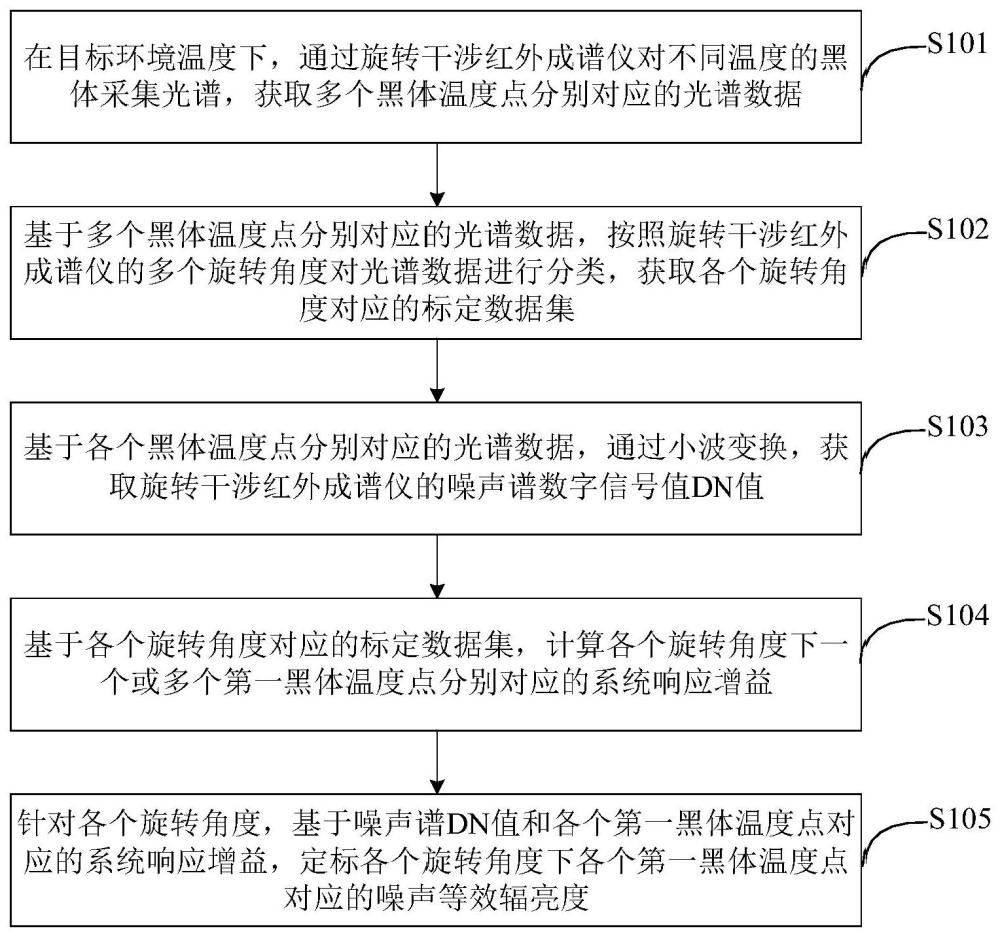
3、在目标环境温度下,通过旋转干涉红外成谱仪对不同温度的黑体采集光谱,获取多个黑体温度点分别对应的光谱数据;
4、基于多个黑体温度点分别对应的光谱数据,按照所述旋转干涉红外成谱仪的多个旋转角度对光谱数据进行分类,获取各个所述旋转角度对应的标定数据集,所述标定数据集包括在对应旋转角度下多个黑体温度点分别对应的光谱数据;
5、基于各个黑体温度点分别对应的光谱数据,通过小波变换,获取所述旋转干涉红外成谱仪的噪声谱数字信号值dn值;
6、基于各个所述旋转角度对应的标定数据集,计算各个所述旋转角度下一个或多个第一黑体温度点分别对应的系统响应增益;
7、针对各个所述旋转角度,基于噪声谱dn值和各个所述第一黑体温度点对应的系统响应增益,定标各个所述旋转角度下各个所述第一黑体温度点对应的噪声等效辐亮度。
8、可选地,所述基于各个所述旋转角度对应的标定数据集,计算各个所述旋转角度下一个或多个第一黑体温度点分别对应的系统响应增益,包括:
9、基于目标旋转角度对应的标定数据集,提取所述目标旋转角度下第二黑体温度点对应的光谱数据和第三黑体温度点对应的光谱数据,所述目标旋转角度为所述多个旋转角度中的任意一个角度,所述第二黑体温度点低于所述第一黑体温度点,所述第三黑体温度点高于所述第一黑体温度点;
10、基于所述目标旋转角度下第二黑体温度点对应的光谱数据和第三黑体温度点对应的光谱数据,通过两点线性定标,确定所述目标旋转角度下第一黑体温度点对应的系统响应增益。
11、可选地,所述基于所述目标旋转角度下第二黑体温度点对应的光谱数据和第三黑体温度点对应的光谱数据,通过两点线性定标,确定所述目标旋转角度下第一黑体温度点对应的系统响应增益,具体包括通过以下公式计算系统响应增益:
12、
13、其中,gain(λ)表示系统响应增益,dnl(λ)表示第二黑体温度点对应的光谱数据,sl(λ)表示第二黑体温度点对应的预设黑体理论辐射亮度,dnh(λ)表示第三黑体温度点对应的光谱数据,sh(λ)表示第三黑体温度点对应的预设黑体理论辐射亮度,λ表示波长。
14、可选地,在基于目标旋转角度对应的标定数据集,提取所述目标旋转角度下第二黑体温度点对应的光谱数据和第三黑体温度点对应的光谱数据之后,还包括:
15、基于所述目标旋转角度下第二黑体温度点对应的光谱数据和第三黑体温度点对应的光谱数据,通过两点线性定标,确定所述目标旋转角度下第一黑体温度点对应的辐射偏置;
16、基于所述目标旋转角度下第一黑体温度点对应的辐射偏置,进行高斯滤波处理,获取所述目标旋转角度下第一黑体温度点对应的滤波后辐射偏置。
17、可选地,所述基于所述目标旋转角度下第二黑体温度点对应的光谱数据和第三黑体温度点对应的光谱数据,通过两点线性定标,确定所述目标旋转角度下第一黑体温度点对应的辐射偏置,具体包括通过以下公式计算辐射偏置:
18、
19、其中,offset(λ)表示辐射偏置,dnl(λ)表示第二黑体温度点对应的光谱数据,sl(λ)表示第二黑体温度点对应的预设黑体理论辐射亮度,dnh(λ)表示第三黑体温度点对应的光谱数据,sh(λ)表示第三黑体温度点对应的预设黑体理论辐射亮度,λ表示波长。
20、可选地,所述针对各个所述旋转角度,基于噪声谱dn值和各个所述第一黑体温度点对应的系统响应增益,定标各个所述旋转角度下各个所述第一黑体温度点对应的噪声等效辐亮度,具体包括通过以下公式定标噪声等效辐亮度:
21、
22、其中,sinput_noise(λ)表示噪声等效辐亮度,dnnoise(λ)表示噪声波长为λ处的dn值,k(λ)表示波长为λ处的系统响应增益。
23、可选地,各个黑体温度点分别对应的光谱数据所覆盖的波段包括:近红外波段、短波波段、中波波段和长波波段,相应地,第一黑体温度点对应的噪声等效辐亮度包括:近红外波段的噪声等效辐亮度、短波波段的噪声等效辐亮度、中波波段的噪声等效辐亮度和长波波段的噪声等效辐亮度。
24、第二方面,本发明还提供一种红外成谱仪噪声等效辐亮度的分旋转角度定标装置,包括:
25、采集模块,用于在目标环境温度下,通过旋转干涉红外成谱仪对不同温度的黑体采集光谱,获取多个黑体温度点分别对应的光谱数据;
26、标定数据集获取模块,用于基于多个黑体温度点分别对应的光谱数据,按照所述旋转干涉红外成谱仪的多个旋转角度对光谱数据进行分类,获取各个所述旋转角度对应的标定数据集,所述标定数据集包括在对应旋转角度下多个黑体温度点分别对应的光谱数据;
27、小波变换模块,用于基于各个黑体温度点分别对应的光谱数据,通过小波变换,获取所述旋转干涉红外成谱仪的噪声谱数字信号值dn值;
28、系统响应增益计算模块,用于基于各个所述旋转角度对应的标定数据集,计算各个所述旋转角度下一个或多个第一黑体温度点分别对应的系统响应增益;
29、定标模块,用于针对各个所述旋转角度,基于噪声谱dn值和各个所述第一黑体温度点对应的系统响应增益,定标各个所述旋转角度下各个所述第一黑体温度点对应的噪声等效辐亮度。
30、第三方面,本发明提供一种电子设备,包括:至少一个存储器,用于存储程序;至少一个处理器,用于执行存储器存储的程序,当存储器存储的程序被执行时,处理器用于执行第一方面或第一方面的任一种可能的实现方式所描述的方法。
31、第四方面,本发明提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,当计算机程序在处理器上运行时,使得处理器执行第一方面或第一方面的任一种可能的实现方式所描述的方法。
32、可以理解的是,上述第二方面至第四方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
33、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
34、通过分旋转角度对光谱数据进行分类,可以获取各个旋转角度对应的标定数据集,进而可以分旋转角度计算系统响应增益,以确定各个旋转角度下一个或多个黑体温度点分别对应的系统响应增益,进而结合小波变换所获得的噪声谱dn值,能够分旋转角度定标黑体温度点对应的噪声等效辐亮度,不仅考虑了光谱仪整体的线性关系,还充分利用了不同角度下的相似性,这使得在实际测量中,能够根据当前测量角度选择相应的定标曲线,从而更准确地校正测量数据。
- 还没有人留言评论。精彩留言会获得点赞!