一种病理组织染色机器人的制作方法
本技术涉及细胞染色,具体而言,涉及一种病理组织染色机器人。
背景技术:
1、对病理组织进行观察和鉴别之前需要对病理组织进行染色;现有技术中,常用的病理组织染色的方法包括he染色法和巴氏染色法,he染色法又称为苏木精-伊红染色法,是石蜡切片技术里常用的染色法之一,这种方法适用范围广泛,对组织细胞的各种成分都可以着色,便于全面观察组织构造;同样,巴氏染色也是染色的一种方法,包括固定、和染色、胞浆染色和透明四个步骤,该染色法对细胞进行多色性染色,能够显示出细胞不同的分化成熟状态,染色后的细胞质透亮鲜丽,细胞核结构清晰,细胞核/质染色对比清晰,利于病理组织细胞的发现与诊断。
2、但是现有的病理组织染色装置多为人工操作,而人工染色过程繁琐复杂、费时费力,难以大批量、高效率染色。
3、有鉴于此,特提出本实用新型。
技术实现思路
1、本实用新型的目的在于提供一种病理组织染色机器人,该装置整体结构简单,能够实现全自动的病理组织染色,整个过程无需人工参与,自动化程度高,效率高,染色过程简单,有利于实现大批量细胞染色。
2、为了实现本实用新型的上述目的,特采用以下技术方案:
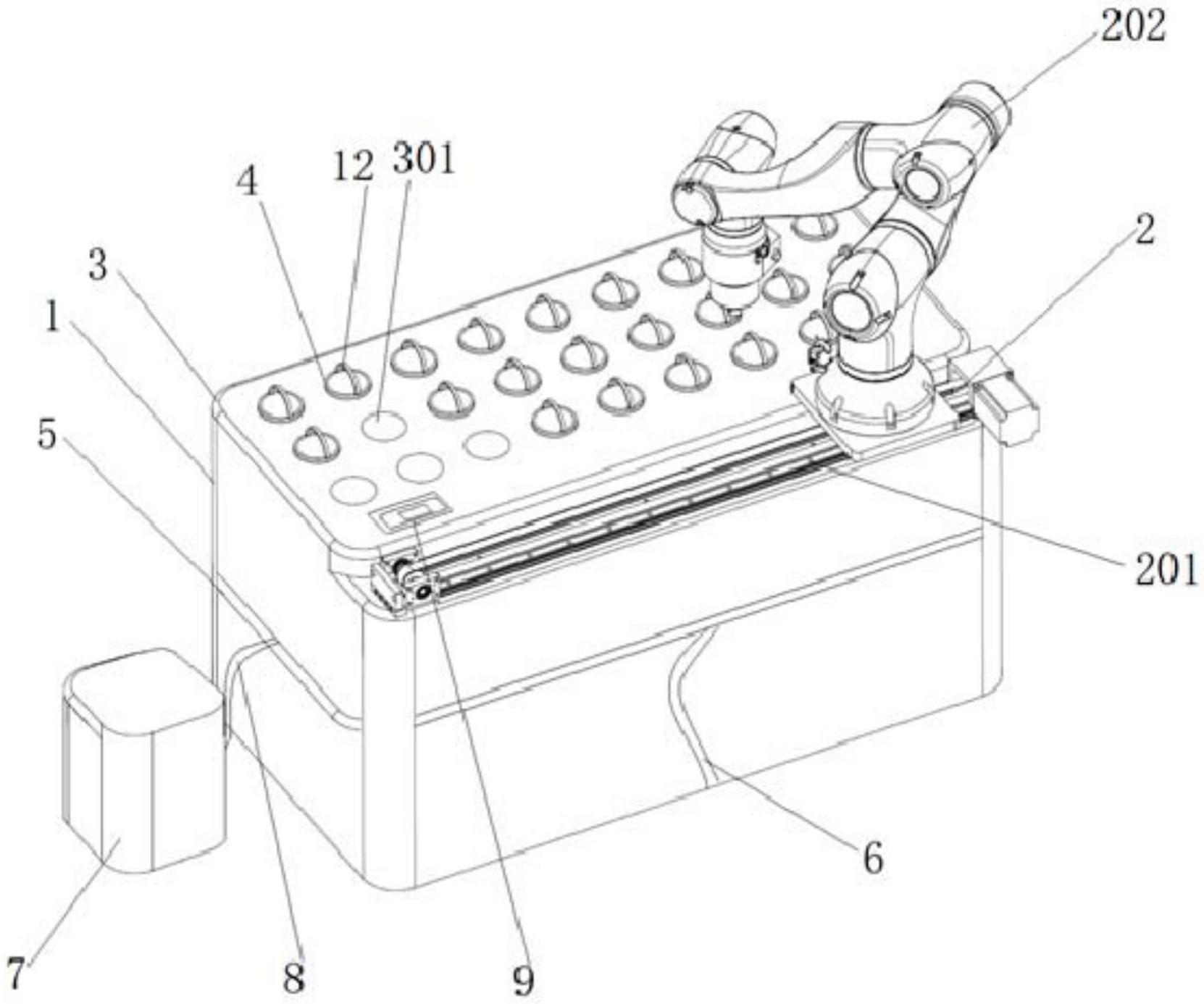
3、本实用新型提供了一种病理组织染色机器人,包括:机架和移动模组,所述机架上设置有第一托盘,所述第一托盘上设置有多个染色盒;所述移动模组设置在所述机架的一侧;
4、所述移动模组包括移动组件和安装在所述移动组件上方的机械臂,所述机械臂的端部勾取染色架依次放置在所述染色盒内进行病理组织染色。
5、优选的,所述机械臂包括第一连接臂、第二连接臂、第三连接臂、第四连接臂、第五连接臂和第六连接臂,所述第一连接臂底部设置有固定座,所述固定座安装在所述移动组件上,所述第二连接臂铰接在所述第一连接臂上,所述第三连接臂铰接在所述第二连接臂上,所述第四连接臂铰接在所述第三连接臂上,所述第五连接臂铰接在所述第四连接臂上,所述第六连接臂铰接在所述第五连接臂上,所述第六连接臂的端部设置有抓钩。
6、优选的,所述移动组件包括沿水平方向设置的移动构件和驱动电机,所述移动构件安装在所述机架的侧边横梁上,所述驱动电机连接在所述移动构件的端部。
7、优选的,所述移动构件包括主动轮、从动轮和同步带,所述主动轮和所述从动轮通过所述同步带传动连接,所述同步带上固定有固定块,所述主动轮连接所述驱动电机,所述主动轮带动所述同步带运动从而使所述固定块以及连接在所述固定块上的部件同步运动。
8、优选的,所述第一托盘上设置有若干个卡槽,相邻所述卡槽之间的距离相等,所述染色盒卡接在所述卡槽内部固定,所述卡槽与所述染色盒的尺寸相适配。
9、优选的,所述第一托盘的正下方设置有用于收集废液的第二托盘,所述第二托盘的底端连接有排水管用以将废液排出。
10、优选的,还包括清洗水箱,所述清洗水箱设置在所述第二托盘的一侧并与所述第二托盘通过输水管连通。
11、优选的,还包括控制模块、加热体和水温传感器,所述控制模块与所述加热体和所述水温传感器连接用于控制温度,所述加热体活动连接在所述染色盒的底端,所述水温传感器设置在所述染色盒的内壁。
12、优选的,上述染色机器人还包括上水管和下水管,所述染色盒底端设置有通孔分别与所述上水管和所述下水管连通以实现上下水功能。
13、优选的,所述染色盒上设置有盒盖,所述盒盖上方设置有把手便于所述机械臂进行抓取拿放。
14、与现有技术相比,本实用新型的有益效果在于:
15、本实用新型的一种病理组织染色机器人,整体结构简单,染色过程全自动,省时省力,效率高,有助于实现大批量染色;该染色机器人采用机械臂与移动组件配合的方式完成各部件的移动,整体成本低;设置加热体和水温传感器,保证染色盒内的温度恒定,避免人为主观因素的影响,提高对病理组织的染色质量。
技术特征:
1.一种病理组织染色机器人,其特征在于,包括:机架和移动模组,所述机架上设置有第一托盘,所述第一托盘上设置有多个染色盒;所述移动模组设置在所述机架的一侧;
2.根据权利要求1所述的病理组织染色机器人,其特征在于,所述机械臂包括第一连接臂、第二连接臂、第三连接臂、第四连接臂、第五连接臂和第六连接臂,所述第一连接臂底部设置有固定座,所述固定座安装在所述移动组件上,所述第二连接臂铰接在所述第一连接臂上,所述第三连接臂铰接在所述第二连接臂上,所述第四连接臂铰接在所述第三连接臂上,所述第五连接臂铰接在所述第四连接臂上,所述第六连接臂铰接在所述第五连接臂上,所述第六连接臂的端部设置有抓钩。
3.根据权利要求1所述的病理组织染色机器人,其特征在于,所述移动组件包括沿水平方向设置的移动构件和驱动电机,所述移动构件安装在所述机架的侧边横梁上,所述驱动电机连接在所述移动构件的端部。
4.根据权利要求3所述的病理组织染色机器人,其特征在于,所述移动构件包括主动轮、从动轮和同步带,所述主动轮和所述从动轮通过所述同步带传动连接,所述同步带上固定有固定块,所述主动轮连接所述驱动电机,所述主动轮带动所述同步带运动从而使所述固定块以及连接在所述固定块上的部件同步运动。
5.根据权利要求1所述的病理组织染色机器人,其特征在于,所述第一托盘上设置有若干个卡槽,相邻所述卡槽之间的距离相等,所述染色盒卡接在所述卡槽内部固定,所述卡槽与所述染色盒的尺寸相适配。
6.根据权利要求1所述的病理组织染色机器人,其特征在于,所述第一托盘的正下方设置有用于收集废液的第二托盘,所述第二托盘的底端连接有排水管用以将废液排出。
7.根据权利要求6所述的病理组织染色机器人,其特征在于,还包括清洗水箱,所述清洗水箱设置在所述第二托盘的一侧并与所述第二托盘通过输水管连通。
8.根据权利要求1所述的病理组织染色机器人,其特征在于,还包括控制模块、加热体和水温传感器,所述控制模块与所述加热体和所述水温传感器连接用于控制温度,所述加热体活动连接在所述染色盒的底端,所述水温传感器设置在所述染色盒的内壁。
9.根据权利要求1所述的病理组织染色机器人,其特征在于,还包括上水管和下水管,所述染色盒底端设置有通孔分别与所述上水管和所述下水管连通用以实现上下水功能。
10.根据权利要求1所述的病理组织染色机器人,其特征在于,所述染色盒上设置有盒盖,所述盒盖上方设置有把手便于所述机械臂进行抓取拿放。
技术总结
本技术提供了一种病理组织染色机器人,包括:机架和移动模组,所述机架上设置有第一托盘,所述第一托盘上设置有多个染色盒;所述移动模组设置在所述机架的一侧;所述移动模组包括移动组件和安装在所述移动组件上方的机械臂,所述机械臂的端部勾取染色架依次放置在所述染色盒内进行病理组织染色。本技术的病理组织染色机器人整体结构简单,能够实现全自动的病理组织染色,整个过程无需人工参与,自动化程度高,效率高,染色过程简单,有利于实现大批量细胞染色。
技术研发人员:肖鹏
受保护的技术使用者:北京华伊智能医疗科技有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!