一种基于激光雷达的羊只体尺体重快速获取装置及方法
本发明涉及畜牧养殖,尤其是一种基于激光雷达的羊只体尺体重快速获取装置及方法。
背景技术:
1、生产力的不断发展持续提高人们的生活水平,奶制品、肉类食品以及皮质商品的需求日益增大,最终推动了畜牧业的蓬勃发展。在这其中羊只养殖是畜牧业的重要组成部分。羊的体尺和体重数据既能够反映其体型、结构和发育状况,也可以反映其生理功能、生产性能、抗病能力和对外界生活条件的适应性等。因此,进行羊只体尺的监测对于提高精准养殖水平和羊只的品种选育具有重要的现实意义。
2、传统的牲畜体尺测量方法是人工利用卡尺、卷尺等工具对其进行直接测量。费时费力,且主观性大,还会引起牲畜的应激反应等,从而影响测量的精度和牲畜的身体健康。体重测量通常使用磅秤或者电子秤等,但是由于羊的天性活泼好动,通常测量体重的时候往往需要捆绑固定羊只,更容易导致羊只产生应激反应,导致生产性能下降、疾病增加,甚至死亡,严重影响了动物个体的生长发育。随着机器视觉技术、信息感知技术和自动化等技术不断的发展和成熟,并越来越多的应用到精准畜牧、养殖业等农业生产当中。传统的人工测量方式逐渐向基于机器视觉技术和自动化等技术的无接触式测量方式转变。现阶段,如何提高基于机器视觉技术的自动测量系统的测量精度成为了本领域研究热点之一。
技术实现思路
1、本发明要解决的技术问题是提供一种基于激光雷达的羊只体尺体重快速获取装置及方法,能够解决现有技术的不足,可以快速、准确的获取羊只的体尺体重数据。
2、为解决上述技术问题,本发明所采取的技术方案如下。
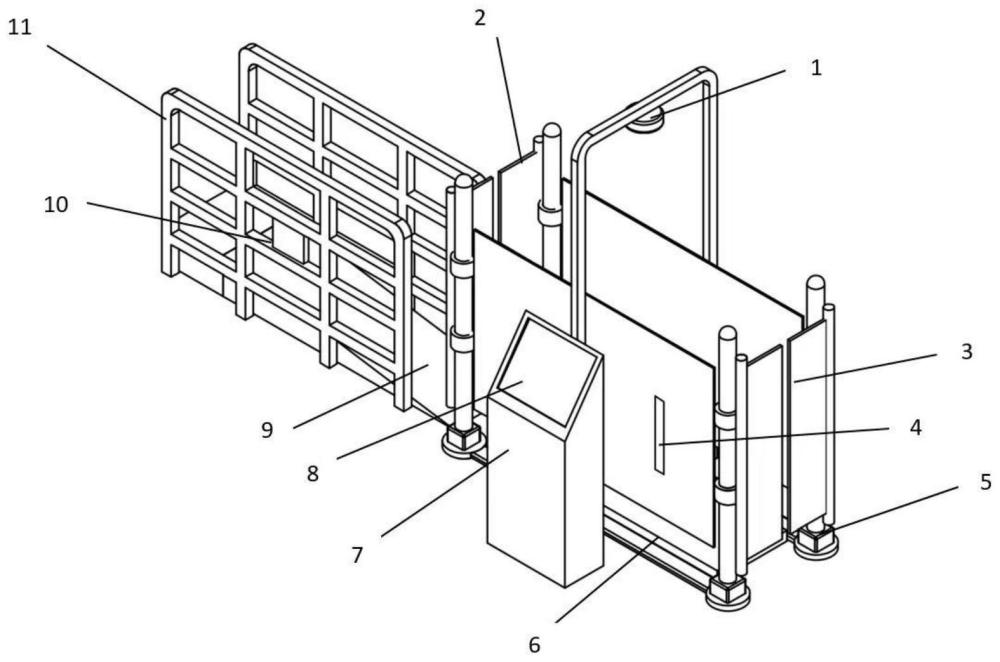
3、一种基于激光雷达的羊只体尺体重快速获取装置,包括入口门禁,入口门禁的两侧安装有入口围栏,入口围栏上安装有高频耳标天线,入口门禁外侧地面上设置有入口斜坡,入口门禁内侧地面上设置有地磅,地磅上方安装有激光雷达,地磅的出口安装有出口门禁,入口门禁和出口门禁之间安装有光栅传感器,入口门禁和出口门禁分别与驱动电机连接,高频耳标天线、地磅、激光雷达、光栅传感器和驱动电机分别与控制柜通讯连接,控制柜上安装有触摸显示屏。
4、一种上述的基于激光雷达的羊只体尺体重快速获取装置的获取方法,包括以下步骤:当羊只进入入口围栏,高频耳标天线检测到羊只耳标后,控制柜启动驱动电机打开入口门禁,羊只进入入口门禁后触发光栅传感器,控制柜启动驱动电机关闭入口门禁,地磅读取羊只体重上传到控制柜,同时控制柜启动激光雷达拍摄深度图像,控制柜通过对深度图像进行处理和计算得到羊只的体尺,然后控制柜启动驱动电机打开出口门禁,羊只走出出口门禁,最后控制柜将得到耳标信息和对应的体重信息、体尺信息进行保存并输出至触摸显示屏进行显示。
5、作为优选,对深度图像进行处理和计算包括以下步骤,
6、a、将深度图像数据转存为点云数据,并对点云数据进行预处理;
7、b、获取羊只的点云轮廓曲线;
8、c、利用高斯滤波平滑曲线轮廓;
9、d、根据人工测量的体尺参数标准对轮廓曲线进行区间划分;
10、e、对划分的区间轮廓曲线进行拟合;
11、f、提取羊只体尺参数特征点;
12、g、计算羊只体尺。
13、作为优选,步骤a中,对点云数据进行预处理包括以下步骤,
14、a1、去除背景点云;
15、设定约束条件x,y和z代表点云在坐标系中的位置,(xmin,xmax)、(ymin,ymax)和(zmin,zmax)分别表示在坐标系三个坐标方向的滤波范围,所有不满足上述约束条件的点云被认为是背景噪声而被过滤掉;
16、将过滤掉的点云数据按照位置区域进行聚类,提取每一类点云数据的第一特征值集合;
17、a2、去除稀疏点;
18、确定每一个小体素的边长l,其中s是比例系数,α是用来调节小体素边长的比例因子,n是单位体素内的点云数量,通过调节α可使计算动态适应点云各个部分的稀疏情况,单位体素内包含的点云个数n满足n表示点云数据总的数量,v表示小体素的体积,得到体素边长与点云总数的关系为体素体的体积满足v=lxlylz,lx、ly、lz分别表示小体素在x、y、z轴上的投影,确定体素内的重心坐标,来寻找代替这个小体素点云数据,式中m为体素内点云个数,(xi,yi,zi)为每个点云的坐标,选取最靠近重心坐标的点云数据,代替小体素内的所有点;
19、提取小体素内被代替的点云数据的第二特征值集合,与第一特征值集合进行相似度比对,使用相似度最高的第一特征值集合对应的点云数据对小体素内的点云数据进行修正,具体为使用第一特征值集合生成若干个参考数据点,将参数数据点对应的点云数据进行均值化处理,然后将均值化处理后的点云数据与小体素内的点云数据进行加权融合,均值化处理后的点云数据的加权值与其对应的第一特征值集合和第二特征值集合的相似度成正比;
20、a3、去除噪声点云;
21、对于点云中任意一个点,通过计算它到附近k个临近点的平均距离xi,yi,zi分别代表目标点在三个坐标轴上的坐标值,xj,yj,zj分别代表目标点的近邻点在三个坐标轴上的坐标值,通过计算点云中每个点对应的平均距离的均值μ和标准差σ,确定有效点云的范围为(μ-σ*std,μ+σ*std),std为系数,如果点云中某个点到k个近邻点的平均距离不在这个范围之内,则判定该点属于噪声。
22、作为优选,步骤a3中,对判定出的噪声点进行二次确认,包括以下步骤,
23、a31、将噪声点在(μ-σ*std,μ+σ*std)的有效点云范围内进行遍历,建立噪声点与有效点云的关联矩阵;
24、a32、将关联矩阵和有效点云进行分解,得到若干个关联子矩阵和有效点云数据层,每个关联子矩阵对应一个有效点云数据层;
25、a33、计算每个小体素与每个有效点云数据层之间的参考关联矩阵,若某个小体素的全部参考关联矩阵相似度大于设定阈值,则判定该噪声点为非噪声点,否则判定该噪声点依旧为噪声点。
26、作为优选,步骤b中,获取羊只的点云轮廓曲线包括以下步骤,
27、分别将点云数据向xoy二维平面和xoz二维平面投影;对于xoz平面投影点集p的任意一点pi设定搜索半径r,然后将搜索半径r内的所有邻域点记为集合n(pi),即n(pi)={pj|pj∈p,||pi–pj||<r};设定一个曲面方程ax+by+cz=d(≥0),且a2+b2+c2=1,取pi对应的集合n(pi),计算n(pi)到曲面的距离di=|ax+by+cz-d|;求解最小时对应的特征向量即为该点的法向量n;根据pi和其法向量n做该点的切平面将集合n(pi)内的点投影到切平面上,记为n(p′i),在n(p′i)中任意选取一点p′i,以为u轴,n为ω轴,u×ω为v轴,以pi为坐标中心构建局部坐标系,记为(pi,u,v,ω);分别计算集合n(pi)中其他点pn到点pi的向量pipn与坐标轴u的顺时针夹角ω=(θ1,θ2,θ3,…,θn),对相邻夹角两两作差得到夹角集合ω′=(θ′1,θ′2,θ′3…,θ′n-1),其中θ′n-1=θn-θn-1;ω'为相邻两向量之间的夹角;将集合ω'中的元素降序排列,找出其中最大的夹角θ′max,当θ′max大于阈值时,认为该点为边缘点。
28、作为优选,步骤d中,对轮廓曲线进行区间划分包括以下步骤,
29、遍历背部轮廓所有点,找到x轴方向的x值最小点a(x1,z1)和最大点b(x2,z2);根据点a和b的x值大小,取轮廓前20%~55%为区间1曲线,取轮廓后45%为区间2曲线。
30、作为优选,步骤e中,对划分的区间轮廓曲线使用以下公式进行拟合,
31、
32、其中,p0、p1、p2、p3、为控制点,t为自变量(t∈[0,1])。
33、作为优选,步骤f中,提取羊只体尺参数特征点包括以下步骤,
34、选取耆甲点、坐骨结节最后隆突点和坐骨结节后端点作为羊只体尺参数特征点;
35、耆甲点位于区间1曲线内,具体表现为羊只脖颈的突出位置,在拟合后的曲线上以波峰的形式呈现,通过波峰波谷检测得到耆甲点,将耆甲点作为肩高测量点;
36、坐骨结节最后隆突点位于区间2曲线内最高处,求拟合后的区间2曲线z坐标最小的点得到坐骨结节最后隆突点,坐骨结节最后隆突点用于计算臀高;
37、坐骨结节后端点位于背部曲率最大的地方,为羊尾上沿,取轮廓曲线x坐标值最大b(x2,z2)点为坐骨结节后端点;
38、肩胛前端位于前腿根部的前侧,且前腿与耆甲点位于同一垂线,而大腿前侧高度占羊只体高的二分之一,取耆甲点波峰点向x负方向十厘米为体斜长的前端点纵坐标,取耆甲点到地面距离的二分之一即肩高的二分之一为肩胛前端点横坐标,在求取到耆甲点之后,根据耆甲点的位置定位到肩胛前端点e(x5,z5);
39、胸宽测量点利用耆甲点求取,将耆甲点后侧约5cm的地方作为胸宽测量点。
40、作为优选,步骤g中,计算羊只体尺包括以下步骤,
41、肩高等于耆甲点c(x3,z3)点到地面的高度,直接利用相机高度减去耆甲点的高度然后取绝对值得到肩高,同样臀高也是相机的高度减去坐骨结节最后隆突点d(x4,z4)的高度,体斜长则为肩胛前端点e(x5,z5)和背部轮廓x值最大点b(x2,z2)的距离,体尺计算公式为
42、
43、其中,其中hsh为肩高,hhip为臀高,l为体斜长,在得到胸宽测量点f(x6,z6)后,通过背部点云的xoy平面投影,取肩胛后端的测量点位置计算y轴方向的宽度得到胸宽。
44、采用上述技术方案所带来的有益效果在于:本发明通过非接触方法,快速地、精确地获取羊只的背部三维点云模型,并根据三维模型计算出羊只的体尺参数,然后结合地磅得到体重参数。此方法算法简单,计算量小,且可以达到较高的精度。对于获取的点云数据通过去噪降干扰处理,可以大大提高后续点云数据的计算准确性。通过使用点云背景数据对小体素内被代替的点云数据进行修正并对噪声点进行二次确认,可以降低点云数据代替过程导致的信息丢失率。
- 还没有人留言评论。精彩留言会获得点赞!