一种风机叶片检测无人机航线生成方法、装置及电子设备与流程
本发明涉及工程检测领域,具体涉及一种风机叶片检测无人机航线生成方法、装置及电子设备。
背景技术:
1、风机叶片在运行过程中,由于长期的振动和应力作用,以及雨水或风沙腐蚀,风机叶片容易出现裂缝、破损、腐蚀和气孔等缺陷。及时巡检并发现这些缺陷可以达到预警的目标,有助于风机的安全运行。现有对于风机叶片检测通常为在风机静止状态下利用无人机通过云台搭载相机对风机叶片进行拍摄后进行检测判断。然而现有对风机叶片检测中通常未考虑对风机叶片检测无人机拍摄过程的航线进行优化,因此检测过程效率较低。
技术实现思路
1、有鉴于此,有必要提供一种风机叶片检测无人机航线生成方法、装置及电子设备,用于解决现有技术未对风机叶片检测无人机航线进行优化,导致检测效率较低的技术问题。
2、为了解决上述问题,一方面,本发明提供了一种风机叶片检测无人机航线生成方法,包括:
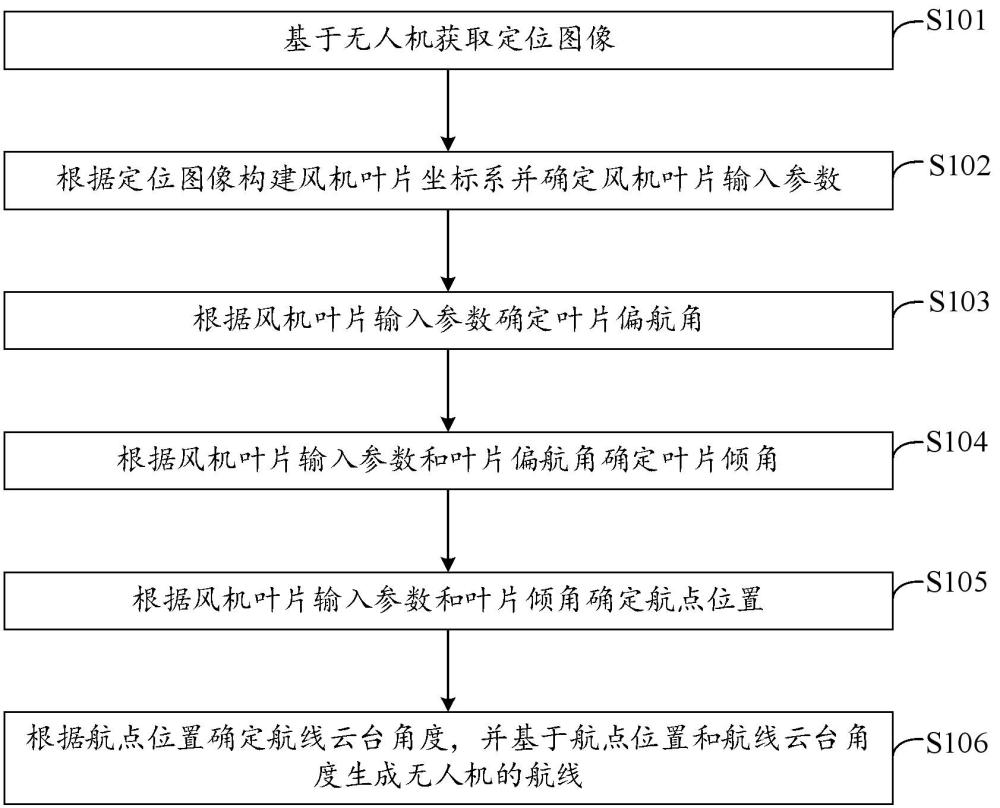
3、基于无人机获取定位图像;
4、根据定位图像构建风机叶片坐标系并确定风机叶片输入参数;
5、根据风机叶片输入参数确定叶片偏航角;
6、根据风机叶片输入参数和叶片偏航角确定叶片倾角;
7、根据风机叶片输入参数和叶片倾角确定航点位置;
8、根据航点位置确定航线云台角度,并基于航点位置和航线云台角度生成无人机的航线。
9、进一步的,基于无人机获取定位图像,包括:
10、基于预设端点定义策略定义待检测风机叶片的左端点、右端点和中心点,并依次对待检测风机叶片左端点、中心点和右端点进行拍摄得到定位图像以及定位图像对应位置信息。
11、进一步的,风机叶片输入参数包括左端点向量、右端点向量和叶片长度,根据定位图像构建风机叶片坐标系并确定风机叶片输入参数,包括:
12、获取叶片规格长度,并设定误差阈值;
13、根据位置信息并以中心点作为坐标原点构建风机叶片坐标系;
14、根据左端点向量和右端点向量确定叶片长度,并根据叶片规格长度验证叶片长度是否满足误差阈值。
15、进一步的,根据风机叶片输入参数确定叶片偏航角,包括:
16、根据左端点向量和右端点向量确定法向量;
17、根据左端点向量、右端点和法向量确定偏航角和叶片锥度,并根据叶片锥度和偏航角验证是否满足误差阈值。
18、进一步的,根据风机叶片输入参数和叶片偏航角确定叶片倾角,包括:
19、设置零度角与正方向,根据左端点向量和右端点向量确定初始左倾角和初始右倾角;
20、根据初始左倾角和初始右倾角确定第一叶片倾角、第二叶片倾角和第三叶片倾角,并验证第一叶片倾角、第二叶片倾角和第三叶片倾角是否满足误差阈值。
21、进一步的,根据风机叶片输入参数和叶片倾角确定航点位置,包括:
22、根据叶片倾角、左端点向量和右端点向量确定各叶片端点位置;
23、设置拍摄安全距离,根据各叶片端点位置和拍摄安全距离确定各航线平移向量和对应航点位置,并根据航线平移向量确定云台航线类型,云台航线类型包括下置云台航线和上置云台航线。
24、进一步的,根据航点位置确定航线云台角度,并基于航点位置和航线云台角度生成无人机的航线,包括:
25、设置无人机偏航方向,根据航点位置和云台航线类型确定无人机的航线云台角度;
26、根据航点位置和航线云台角度确定无人机的航线。
27、另一方面,本发明还提供了一种风机叶片检测无人机航线生成装置,包括:
28、定位图像获取单元,用于基于无人机获取定位图像;
29、输入参数确定单元,用于根据定位图像构建风机叶片坐标系并确定风机叶片输入参数;
30、偏航角确定单元,用于根据风机叶片输入参数确定叶片偏航角;
31、叶片倾角确定单元,用于根据风机叶片输入参数和叶片偏航角确定叶片倾角;
32、航点确定单元,用于根据风机叶片输入参数和叶片倾角确定航点位置;
33、云台角度确定单元,用于根据航点位置确定航线云台角度,并基于所述航点位置和所述航线云台角度生成所述无人机的航线。
34、另一方面,本发明还提供了一种电子设备,包括处理器、存储器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行程序时,实现上述的风机叶片检测无人机航线生成方法。
35、另一方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时,实现上述的风机叶片检测无人机航线生成方法。
36、与现有技术相比,采用上述实施例的有益效果是:本发明通过规划无人机航线的航点位置和拍摄的云台角度,实现对风机叶片检测无人机航线的自动生成,提高检测效率。
技术特征:
1.一种风机叶片检测无人机航线生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的风机叶片检测无人机航线生成方法,其特征在于,所述基于无人机获取定位图像,包括:
3.根据权利要求2所述的风机叶片检测无人机航线生成方法,其特征在于,所述风机叶片输入参数包括左端点向量、右端点向量和叶片长度,所述根据所述定位图像构建风机叶片坐标系并确定风机叶片输入参数,包括:
4.根据权利要求3所述的风机叶片检测无人机航线生成方法,其特征在于,所述根据所述风机叶片输入参数确定叶片偏航角,包括:
5.根据权利要求3所示的风机叶片检测无人机航线生成方法,其特征在于,所述根据所述风机叶片输入参数和所述叶片偏航角确定叶片倾角,包括:
6.根据权利要求3所示的风机叶片检测无人机航线生成方法,其特征在于,所述根据所述风机叶片输入参数和所述叶片倾角确定航点位置,包括:
7.根据权利要求6所示的风机叶片检测无人机航线生成方法,其特征在于,所述根据所述航点位置确定航线云台角度,并基于所述航点位置和所述航线云台角度生成所述无人机的航线,包括:
8.一种风机叶片检测无人机航线生成装置,其特征在于,所述方法包括:
9.一种电子设备,包括处理器、存储器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,处理器执行程序时,实现根据权利要求1至7任一项所述的风机叶片检测无人机航线生成方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现根据权利要求1至7任一项所述的风机叶片检测无人机航线生成方法。
技术总结
本发明公开了一种风机叶片检测无人机航线生成方法、装置及电子设备,包括:基于无人机获取定位图像;根据定位图像构建风机叶片坐标系并确定风机叶片输入参数;根据风机叶片输入参数确定叶片偏航角;根据风机叶片输入参数和叶片偏航角确定叶片倾角;根据风机叶片输入参数和叶片倾角确定航点位置;根据航点位置确定航线云台角度,并基于航点位置和航线云台角度生成无人机的航线。综上,本发明通过规划无人机航线的航点位置和拍摄的云台角度,实现对风机叶片检测无人机航线的自动生成,提高检测效率。
技术研发人员:张启峰,莆杰艺,张光弢,曹红新,秦增忍
受保护的技术使用者:中国能源建设集团陕西省电力设计院有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!