船舶偏航判定方法、装置和可读存储介质与流程
本发明涉及船舶偏航判定,具体而言,涉及一种船舶偏航判定方法、装置和可读存储介质。
背景技术:
1、目前,相关技术中对船舶的偏航判定都是通过人工不定时的一艘一艘的查询自己关注的船舶的位置和历史轨迹来人为判定船舶偏航行为,或者通过分析计算大量的数据来判断船舶是否偏航。这两种判断方式都会存在研判速度慢、判断不及时不精准的问题。
2、因此,如何提出一种能够降低误判率,提升研判速度的船舶偏航判定方法成为目前亟待解决的问题。
技术实现思路
1、本发明旨在至少解决现有技术或相关技术中判断船舶是否偏航时,研判速度慢、判断不及时不精准的问题。
2、因此,本发明的第一个目的在于提供了一种船舶偏航判定方法。
3、本发明的第二个目的在于提供了一种船舶偏航判定装置。
4、本发明的第三个目的在于提供了一种船舶偏航判定装置。
5、本发明的第四个目的在于提供了一种可读存储介质。
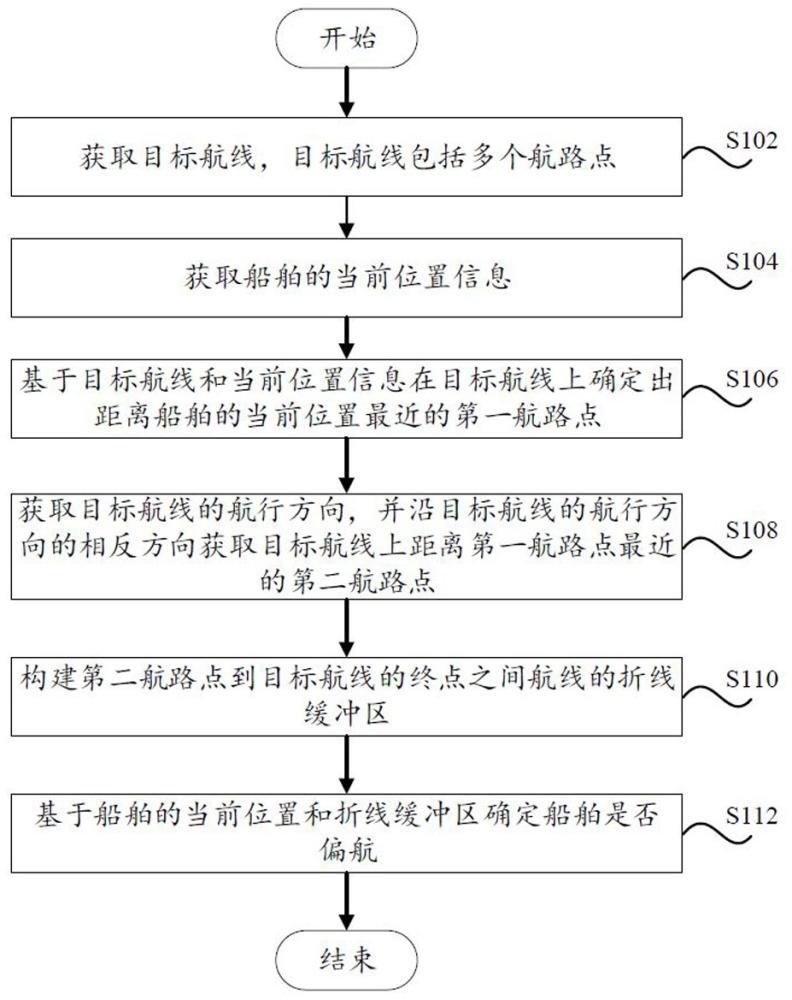
6、本发明第一方面的技术方案提供了一种船舶偏航判定方法,包括:获取目标航线,目标航线包括多个航路点;获取船舶的当前位置信息;基于目标航线和当前位置信息在目标航线上确定出距离船舶的当前位置最近的第一航路点;获取目标航线的航行方向,并沿目标航线的航行方向的相反方向获取目标航线上距离第一航路点最近的第二航路点;构建第二航路点到目标航线的终点之间航线的折线缓冲区;基于船舶的当前位置和折线缓冲区确定船舶是否偏航。
7、根据本发明提供的船舶偏航判定方法,能够根据指定的目标航线和船舶的当前位置信息之间的动态关系确定出船舶是否偏航,相比于相关技术中判定船舶是否偏航的方案来说,本技术无需计算大量数据,提高了研判的速度,航运行业相关方能更及时的得到偏航船舶的预警信息,降低了偏航预警的误报率。具体地,获取目标航线和船舶的当前位置信息,并以此确定出目标航线上距离船舶当前位置最近的第一航路点,然后沿目标航线的航行方向的相反方向获取目标航线上距离第一航路点最近的第二航路点,这样就可以构建第二航路点到目标航线终点之间航线的折线缓冲区,进而通过船舶的当前位置和折线缓冲区的位置关系确定出船舶是否偏航。可以理解的是,本技术只需要根据船舶的当前位置构建第二航路点到目标航线终点之间航线的折线缓冲区,也即,本技术是根据船舶的实时位置构建部分航线的折线缓冲区,并不需要构建整个目标航线的缓冲区,因此能够降低数据的运算处理量,从而提高研判速度。并且,由于本技术是根据船舶的实时位置构建折线缓冲区,因此能够更加精准的判断船舶是否偏航。
8、另外,本技术提供的船舶偏航判定方法还可以具有如下附加技术特征:
9、在一些技术方案中,构建第二航路点到目标航线的终点之间航线的折线缓冲区的步骤,具体包括:将第二航路点到目标航线的终点之间的航线进行分段,得到多个航线段;确定多个航线段的曲折系数和偏航阈值;根据曲折系数和偏航阈值构建折线缓冲区。
10、在该技术方案中,可以先将第二航路点到目标航线终点之间的航线进行分段,得到多个航线段,然后确定多个航线段的曲折系数和偏航阈值,根据曲折系数和偏航阈值构建折线缓冲区。该种方式,能够准确快速地构建出折线缓冲区,从而有利于提高研判的速度。
11、在一些技术方案中,航线段的曲折系数具体采用如下公式计算:
12、;
13、其中, t表示曲折系数, l1 i表示第 i个航线段的路程距离, l2 i表示第 i个航线段的起点到终点的直线距离, i表示航线段的序号。
14、在一些技术方案中,航线段的偏航阈值具体采用如下公式计算:
15、 r i= r/ t i;
16、其中, r i表示第 i个航线段的偏航阈值, r表示预设偏航阈值, t i表示第 i个航线段的曲折系数, i表示航线段的序号。
17、在一些技术方案中,将第二航路点到目标航线的终点之间的航线进行分段,得到多个航线段的步骤,具体包括:获取第二航路点到目标航线的终点之间航线上所有航路点的航向;确定当前航路点的航向与下一个航路点的航向所形成的夹角;判断夹角是否满足预设角度;在夹角满足预设角度的情况下,将当前航路点确定为分段点;根据分段点对第二航路点到目标航线终点之间的航线进行分段,以得到多个航线段。
18、在该技术方案中,先确定出当前航路点的航向与下一个航路点的航向所形成的夹角,在夹角的角度满足预设角度的情况下,将当前航路点确定为分段点,根据分段点对第二航路点到目标航线终点之间的航线进行分段,以得到多个航线段。可以理解的是,航线就是地图上一些矢量点的集合,构成了一条有方向的折线,因此,两个相邻的矢量点的航向之间可能会存在一定的角度,在该角度满足预设角度时,就能够以当前矢量点为分段点进行分段。
19、在一些技术方案中,预设角度大于90°。
20、在一些技术方案中,基于船舶的当前位置和折线缓冲区确定船舶是否偏航的步骤,具体包括:判断船舶是否位于折线缓冲区外;在船舶位于折线缓冲区外的情况下,确定船舶偏航。
21、本发明第二方面的技术方案提供了一种船舶偏航判定装置,包括:第一获取模块,用于获取目标航线,目标航线包括多个航路点;第二获取模块,用于获取船舶的当前位置信息;第一确定模块,用于基于目标航线和当前位置信息在目标航线上确定出距离船舶的当前位置最近的第一航路点;第三获取模块,用于获取目标航线的航行方向,并沿目标航线的航行方向的相反方向获取目标航线上距离第一航路点最近的第二航路点;构建模块,用于构建第二航路点到目标航线的终点之间航线的折线缓冲区;第二确定模块,用于基于船舶的当前位置和折线缓冲区确定船舶是否偏航。
22、根据本发明提供的船舶偏航判定装置,包括第一获取模块、第二获取模块、第一确定模块、第三获取模块、构建模块和第二确定模块。第一获取模块能够获取目标航线,目标航线包括多个航路点。第二获取模块能够获取船舶的当前位置信息。第一确定模块能够基于目标航线和当前位置信息在目标航线上确定出距离船舶当前位置最近的第一航路点。第三获取模块能够获取目标航线的航行方向,并沿目标航线的航行方向的相反方向获取目标航线上距离第一航路点最近的第二航路点。构建模块能够构建第二航路点到目标航线终点之间航线的折线缓冲区。第二确定模块能够基于船舶的当前位置和折线缓冲区确定船舶是否偏航。本发明提供的船舶偏航判定装置能够根据指定的目标航线和船舶的当前位置信息之间的动态关系确定出船舶是否偏航,相比于相关技术中判定船舶是否偏航的方案来说,本技术无需计算大量数据,提高了研判的速度,航运行业相关方能更及时的得到偏航船舶的预警信息,降低了偏航预警的误报率。
23、本发明第三方面的技术方案提供了一种船舶偏航判定装置,包括:存储器和处理器,存储器储存有程序或指令,程序或指令被处理器执行时,实现如第一方面任一项技术方案中的船舶偏航判定方法的步骤。
24、根据本发明提供的船舶偏航判定装置,包括存储器和处理器,存储器储存有程序或指令,程序或指令被处理器执行时,实现如第一方面任一项技术方案中的船舶偏航判定方法的步骤。由于该船舶偏航判定装置能够实现如第一方面任一项技术方案中的船舶偏航判定方法的步骤。因此,本发明提供的船舶偏航判定装置还具有第一方面任一项技术方案中的船舶偏航判定方法的全部有益效果,在此不再赘述。
25、本发明第四方面的技术方案提供了一种可读存储介质,其上存储有程序或指令,程序或指令被执行时,实现如第一方面任一项技术方案中的船舶偏航判定方法的步骤。
26、根据本发明提供的可读存储介质,其上存储有程序或指令,程序或指令被执行时,实现如第一方面任一项技术方案中的船舶偏航判定方法的步骤。由于该可读存储介质能够实现如第一方面任一项技术方案中的船舶偏航判定方法的步骤。因此,本发明提供的可读存储介质还具有第一方面任一项技术方案中的船舶偏航判定方法的全部有益效果,在此不再赘述。
27、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!