一种基于轨道式机器视觉仪的变形监测系统的制作方法
本申请涉及机器视觉监测领域,尤其涉及一种基于轨道式机器视觉仪的变形监测系统。
背景技术:
1、目前,结构形变监测主要依赖于机器视觉技术,即通过固定式机器视觉仪或定点旋转式机器视觉仪拍摄待测结构得到结构图像,对结构图像进行图像分析,确定待测结构的变形量。
2、然而,固定式机器视觉仪无法调整拍摄角度,定点旋转式机器视觉仪的旋转角度有限,导致二者的监测范围有限。为扩大监测范围,通常会布置多台固定式机器视觉仪或定点旋转式机器视觉仪,导致监测成本较高。
技术实现思路
1、本申请提供一种基于轨道式机器视觉仪的变形监测系统,用以解决为扩大监测范围,通常会布置多台固定式机器视觉仪或定点旋转式机器视觉仪,导致监测成本较高的问题。
2、第一方面,本申请提供一种基于轨道式机器视觉仪的变形监测系统,包括:至少一个轨道式机器视觉仪、至少一个控制点机器视觉仪和监测终端,其中,目标轨道式机器视觉仪是至少一个轨道式机器视觉仪中的任意一个,目标控制点机器视觉仪是至少一个控制点机器视觉仪中的任意一个;
3、监测终端分别与每个轨道式机器视觉仪和每个控制点机器视觉仪通信连接;
4、目标轨道式机器视觉仪用于位移至预设的第一位置,以监测第一位置对应的第一测点,得到第一测点的第一监测信息,以及目标轨道式机器视觉仪的位置信息和倾角信息;
5、目标轨道式机器视觉仪还用于根据第一监测信息、位置信息和倾角信息,得到第一测点的第二监测信息;
6、目标控制点机器视觉仪用于监测目标轨道式机器视觉仪,得到目标轨道式机器视觉仪的姿态信息;
7、监测终端用于根据第二监测信息和姿态信息,得到第一测点的变形信息。
8、在一种可能的设计中,监测终端中预存有第一测点在第一时刻的第一结构信息。
9、在一种可能的设计中,监测终端具体用于:
10、根据第二监测信息和姿态信息,得到第一测点在第二时刻的第二结构信息,其中,第二时刻晚于第一时刻;
11、根据第一结构信息和第二结构信息,得到第一测点在第一时刻与第二时刻间的变形信息。
12、在一种可能的设计中,每个轨道式机器视觉仪均用于监测多个测点;
13、每个控制点机器视觉仪均用于监测至少一个轨道式机器视觉仪。
14、在一种可能的设计中,目标轨道式机器视觉仪还用于位移至预设的第二位置,以监测第二位置对应的第二测点。
15、在一种可能的设计中,一种基于轨道式机器视觉仪的变形监测系统,还包括:网络中继器;
16、监测终端通过网络中继器,分别与每个轨道式机器视觉仪和每个控制点机器视觉仪通信连接。
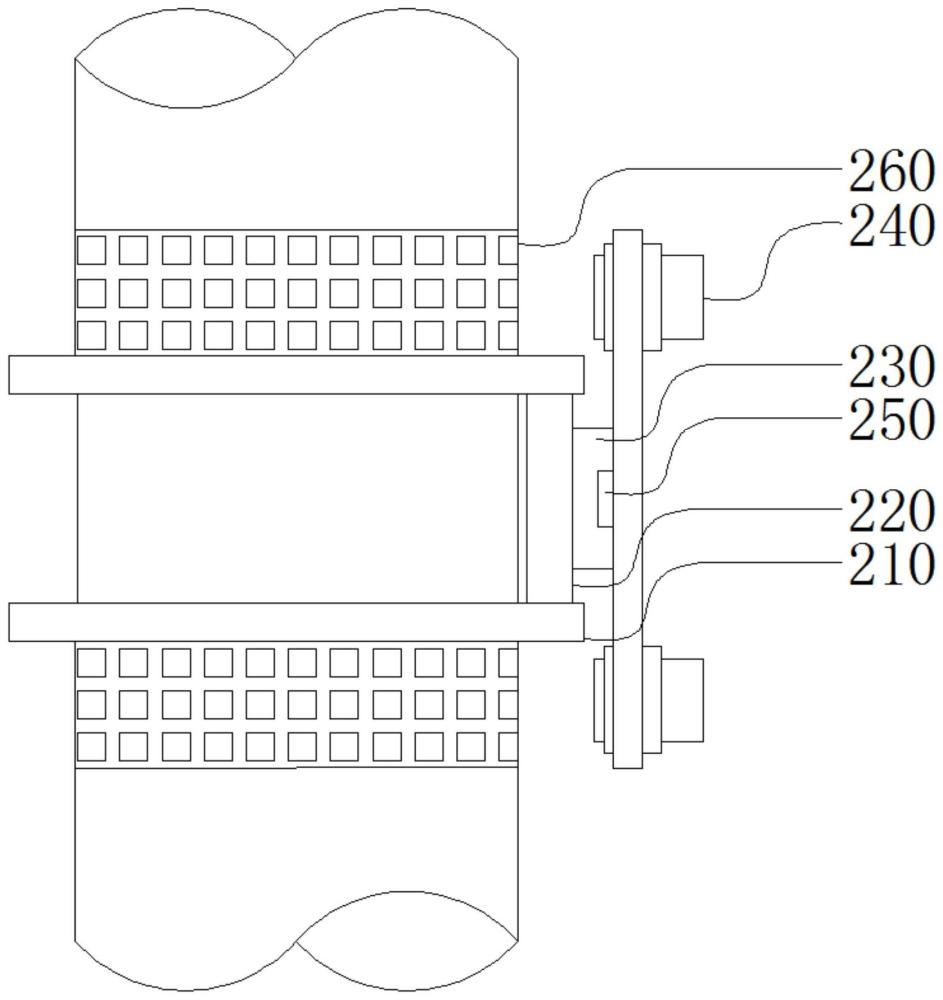
17、在一种可能的设计中,每个轨道式机器视觉仪均包括:滑轨、滑块、边缘计算单元、摄像机和倾角传感器;
18、滑轨套设在测站柱上;
19、边缘计算单元分别与滑块和摄像机固定连接,边缘计算单元用于控制滑块在滑轨上位移;
20、倾角传感器与摄像机固定连接;
21、边缘计算单元分别与倾角传感器和摄像机通信连接。
22、在一种可能的设计中,摄像机为双目摄像机。
23、在一种可能的设计中,每个轨道式机器视觉仪均包括:二进制标记板;
24、二进制标记板套设在测站柱上,滑轨的上侧和下侧均布置有二进制标记板。
25、在一种可能的设计中,每个控制点机器视觉仪均为固定式机器视觉仪或定点旋转式机器视觉仪;
26、每个控制点机器视觉仪均用于监测对应的轨道式机器视觉仪的二进制标记板。
27、本申请提供的一种基于轨道式机器视觉仪的变形监测系统,目标轨道式机器视觉仪用于位移至预设的第一位置,以监测第一位置对应的第一测点,得到第一测点的第一监测信息,以及目标轨道式机器视觉仪的位置信息和倾角信息;目标轨道式机器视觉仪还用于根据第一监测信息、位置信息和倾角信息,得到第一测点的第二监测信息;目标控制点机器视觉仪用于监测目标轨道式机器视觉仪,得到目标轨道式机器视觉仪的姿态信息;监测终端用于根据第二监测信息和姿态信息,得到第一测点的变形信息。实现了如下技术效果:轨道式机器视觉仪调整旋转角度,以同时监测多个测点,解决了为扩大监测范围,通常会布置多台固定式机器视觉仪或定点旋转式机器视觉仪,导致监测成本较高的问题;轨道式机器视觉仪可以在测站柱上360°的旋转,避免了监测盲区,减少了需要的机器视觉仪的数量,解决了当场地无法满足多台机器视觉仪的布设要求时,会导致监测范围不全,甚至是监测失败的问题;导轨式机器视觉仪的视域面积大于固定式机器视觉仪和定点旋转式机器视觉仪的视域面积,进一步地减少了需要的机器视觉仪的数量。
技术特征:
1.一种基于轨道式机器视觉仪的变形监测系统,其特征在于,包括:至少一个轨道式机器视觉仪、至少一个控制点机器视觉仪和监测终端,其中,目标轨道式机器视觉仪是所述至少一个轨道式机器视觉仪中的任意一个,目标控制点机器视觉仪是所述至少一个控制点机器视觉仪中的任意一个;
2.根据权利要求1所述的系统,其特征在于,所述监测终端中预存有所述第一测点在第一时刻的第一结构信息。
3.根据权利要求2所述的系统,其特征在于,所述监测终端具体用于:
4.根据权利要求3所述的系统,其特征在于,所述每个轨道式机器视觉仪均用于监测多个测点;
5.根据权利要求4所述的系统,其特征在于,所述目标轨道式机器视觉仪还用于位移至预设的第二位置,以监测所述第二位置对应的第二测点。
6.根据权利要求5所述的系统,其特征在于,还包括:网络中继器;
7.根据权利要求1-6任一项所述的系统,其特征在于,所述每个轨道式机器视觉仪均包括:滑轨、滑块、边缘计算单元、摄像机和倾角传感器;
8.根据权利要求7所述的系统,其特征在于,所述摄像机为双目摄像机。
9.根据权利要求8所述的系统,其特征在于,所述每个轨道式机器视觉仪均包括:二进制标记板;
10.根据权利要求9所述的系统,其特征在于,所述每个控制点机器视觉仪均为固定式机器视觉仪或定点旋转式机器视觉仪;
技术总结
本申请提供一种基于轨道式机器视觉仪的变形监测系统,涉及机器视觉监测技术领域。该系统包括:目标轨道式机器视觉仪用于位移至预设的第一位置,以监测第一位置对应的第一测点,得到第一测点的第一监测信息,以及目标轨道式机器视觉仪的位置信息和倾角信息;目标轨道式机器视觉仪还用于根据第一监测信息、位置信息和倾角信息,得到第一测点的第二监测信息;目标控制点机器视觉仪用于监测目标轨道式机器视觉仪,得到目标轨道式机器视觉仪的姿态信息;监测终端用于根据第二监测信息和姿态信息,得到第一测点的变形信息。本申请的系统,解决了为扩大监测范围,通常会布置多台固定式机器视觉仪或定点旋转式机器视觉仪,导致监测成本较高的问题。
技术研发人员:汪珂,李莹,雷升祥,王立新,喻忠,仇培云
受保护的技术使用者:中铁第一勘察设计院集团有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!