一种基于边缘计算的实时动态载波相位差分方法及系统与流程
【】本发明属于卫星定位,具体涉及一种基于边缘计算的实时动态载波相位差分方法及系统。
背景技术
0、
背景技术:
1、实时动态载波相位差分技术是一种常用的卫星定位测量技术,在进行卫星定位检测时,综合gbas地面站技术、数据链路技术以及移动站实时动态载波相位差分技术,极大提高了卫星导航差分技术静态和动态定位场景下的定位精度,借助实时动态载波相位差分技术,有效克服了覆盖范围受限的缺陷,可实现24小时全天候导航服务,并且,在卫星信号可视空域内,可实现区域、广域高精度定位服务。
2、目前,对于移动站实时动态载波相位差分技术,需要将移动站设备安装在运载体上接收原始卫星观测数据,进行双差处理,实现高精度定位,即现有技术中的双差定位解算均在移动站设备中完成,对移动站本身的算力、实时性、模糊度搜索等方面要求极高;此外,移动站的算力、主频、功耗均受限于运载体,这就造成实时动态载波相位差分技术定位频率、模糊度搜索成功率、设备的可用性降低。
3、因此,需要一种既能提供差分定位,又可以提高实时模糊度搜索成功率、可用性的实时动态载波相位差分方法和系统。
技术实现思路
0、
技术实现要素:
1、本发明提供一种基于边缘计算的实时动态载波相位差分系统,以解决现有技术中实时模糊度搜索成功率低、定位精度不足的技术问题。本发明还提供一种基于边缘计算的实时动态载波相位差分方法,以解决上述技术问题。
2、本发明是通过以下技术方案实现的,提供的一种基于边缘计算的实时动态载波相位差分方法,技术方案为。
3、一种基于边缘计算的实时动态载波相位差分方法,其特征是,具体步骤为:
4、步骤一,移动站接收卫星的射频信号并转换为移动站数字中频数据信号,地面站接收卫星的射频信号并转换为地面站数字中频数据信号;
5、步骤二,对移动站数字中频数据信号和地面站数字中频数据信号进行载波的剥离,输出数字基带信号;
6、步骤三,用移动站产生的伪码相位和载波多普勒与输入的移动站数字基带信号合成检测统计量进行捕获,并给出多普勒和码偏的初始估计值,再跟踪由于运载体与卫星之间的运动而引起的载波相位和码偏的变化,地面站采用相同方式处理地面站数字基带信号;
7、步骤四,移动站进行移动站原始观测量编码,并通过数传链路播发至地面站将数据传输至地面站,地面站进行地面站原始观测量编码;
8、步骤五,地面站接收移动站发送的移动站原始观测量编码,并进行移动站原始观测量编码预处理。
9、步骤六,对完成预处理的信号进行数据解算;
10、步骤七,处理数据解算结果,进行rtk解算,得到rtk定位结果,并将定位结果通过数传链路播发至移动站;
11、步骤八,移动站接收rtk定位结果,并与移动站产生的时间进行对比得到数据龄差,将数据龄差、rtk定位结果与mems-imu单元检测到的运载体姿态数据进行融合推算运载体航位,得到当前历元的高精度定位结果并输出,完成差分系统定位。
12、进一步地,步骤一中,对移动站接收的卫星的射频信号进行下变频得到移动站模拟中频信号,再将移动站模拟中频信号进行ad采样,得到移动站数字中频数据信号;对地面站接收的卫星的射频信号进行下变频得到地面站模拟中频信号,再将地面站模拟中频信号进行ad采样,得到地面站数字中频数据信号。
13、进一步地,步骤二中,通过对移动站数字中频数据信号和地面站数字中频数据信号与数字本振同相、正交信号进行点乘处理,进行数字处理下变频,完成载波的剥离,完成移动站数字基带信号和地面站数字基带信号的输出。
14、进一步地,步骤三中,捕获时,在一个二维空间中逐格搜索,一个搜索分格的长度是伪码搜索步长,宽度是载波多普勒搜索步长;跟踪时,进行卫星信号的跟踪解码,进行bit同步、帧同步、电文解调、时间同步、卫星信号伪距、载波相位观测量生成。
15、进一步地,步骤四中,地面站和移动站均按照rtcm3.02格式进行可视空域内移动站原始观测量编码和地面站原始观测量编码,原始观测量编码包括对全部卫星双频点伪距原始观测量、载波相位原始观测量的编码和卫星信号采样时间的编码。
16、进一步地,步骤五中,移动站原始观测量编码预处理时,地面站将从数传链路接收的原始观测量编码与地面站原始观测量编码进行测量组合,具体包括:剔除载噪比异常的信号,当信号载噪比≤35或载噪比≥51,则判断载噪比异常,将该数据剔除;剔除通道标志异常的信号,通道失锁、通道故障、通道连续跟踪时间小于3s、通道短路、通道断路、通道同步标志不一致,则判断通道异常,将该数据剔除;剔除卫星可用标志异常的信号时,卫星healh标志为1,urai因子不为0,校验和未通过,则判断卫星可用标志异常,将该数据剔除;剔除卫星高度角中不属于卫星高角度阈值范围的信号时,卫星高度角≤10度,则判断卫星高度角不可用,进行对应数据剔除;剔除双差伪距不一致的信号时,双差伪距残余值≥3倍均值,则判断不一致,将该数据剔除;并且,通过对原始观测数据进行周跳探测,剔除发生周跳的信号。
17、进一步地,步骤六中,首先对完成预处理的信号进行单差处理,得到单差处理结果,再对单差处理结果进行双差处理,之后对求解得到的双差值实时求解浮点模糊度,并进行模糊度搜索和模糊度固定,完成模糊度固定后,进行协方差运算;双差处理采用卡尔曼滤波处理;利用lamda算法进行模糊度搜索和模糊度固定。
18、进一步地,步骤七中,通过整周模糊度修正协方差运算结果数据。
19、进一步地,步骤八中,数据龄差、rtk定位结果与mems-imu单元的运载体姿态数据融合时,采用rtk位置和速度作为量测输入,以eci(地心惯性坐标系)为导航坐标系,把伪距量测与相应的mems-imu解算得到的伪距预测之差以及伪距率与对应的mems-imu解算伪距率预测值之差,综合在一起作为ekf量测方程。对应的,在进行航位推算时,采用ekf进行误差状态估计,之后反馈校正imu(惯性传感器)量测,包括速度增量和角速度增量,量测校正数据输入eci坐标系中,解算得到运载体最优位置估计值。
20、有益效果是:
21、(1)将双差数据处理、模糊度搜索、模糊度固定等高算力、实时性计算功能通过边缘计算设计迁移到地面站设备中进行,有效利用地面站功耗体积几乎不受限、cpu主频高、计算阵列可扩展、算力强大的优势,提高了模糊度求解的实时性和搜索的成功率,通过边缘计算架构设计还可以均衡分布地面站和移动站的算力,进一步提高了差分系统模糊度实时求解成功率。
22、(2)有效降低了移动站对算力的要求,使用更低性能的处理设备和硬件单元即可确保整个移动站运行稳定,有效降低了移动站体积和运行功耗。
23、(3)使用微机械惯性测量单元即mems-imu单元和卫导gnss组合导航,卫导gnss接收惯性导航设备的数据,在定位数据域进行卫导/惯导数据组合,在gnss卫星信号延时、中断、短时信号失锁(≤15s)场景下提高了差分系统可用性。
24、本发明是通过以下技术方案实现的,提供的一种基于边缘计算的实时动态载波相位差分系统,技术方案为:
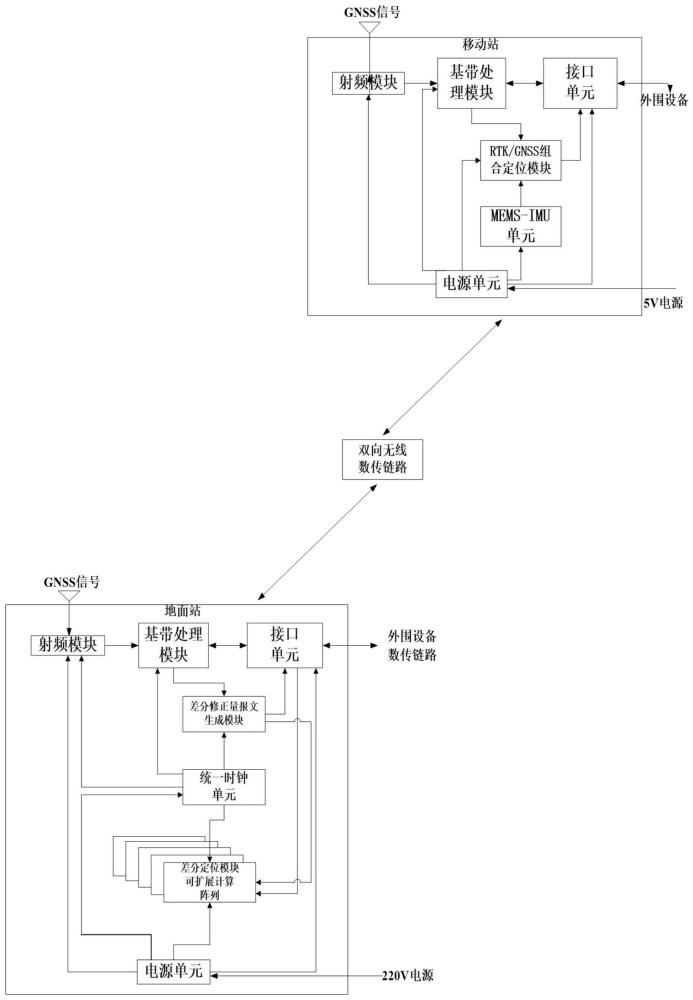
25、基于边缘计算的实时动态载波相位差分系统包括移动站和地面站,移动站和地面站之间通过数传链路进行通信;移动站安装在运载体上,移动站包括移动站射频模块、移动站基带处理模块和移动站组合定位模块,移动站射频模块用于接收卫星信号,对卫星射频信号进行下变频,移动站基带处理模块用于对数字中频数据进行载波剥离,并进行卫星信号捕获、跟踪,卫星信号伪距、载波相位观测量生成,移动站组合定位模块用于地面站rtk定位结果与移动站mems-imu单元姿态数据进行融合,进行航位推算得到实时的高精度定位结果;地面站包括地面站射频模块、地面站基带处理模块和地面站差分定位模块;地面站射频模块,用于接收卫星信号,对卫星射频信号进行下变频,地面站基带处理模块用于对数字中频数据进行载波剥离,并进行卫星信号捕获、跟踪,卫星信号伪距、载波相位观测量生成,地面站差分定位模块用于地面站对原始观测数据进行预处理、进行双差处理、模糊度搜索、模糊度固定、进行rtk解算,数传链路用于地面站和移动站原始观测量数据、rtk定位结果、时间数据和地面站坐标数据播发。
26、有益效果是:
27、(1)将双差数据处理、模糊度搜索、模糊度固定等高算力、实时性计算功能通过边缘计算设计迁移到地面站设备中进行,有效利用地面站功耗体积几乎不受限、cpu主频高、计算阵列可扩展、算力强大的优势,提高了模糊度求解实时性和搜索成功率,通过边缘计算架构设计还可以均衡分布地面站和移动站算力,进一步提高了差分系统模糊度实时求解成功率。
28、(2)有效降低了移动站对算力的要求,使用更低性能的处理设备和硬件单元即可确保整个移动站的稳定运行,有效降低了移动站体积和运行功耗。
29、(3)通过边缘计算架构设计还可以均衡分布地面站和移动站算力,进一步提高了差分系统模糊度实时求解成功率。
30、(4)使用微机械惯性测量单元即mems-imu单元和卫导gnss组合导航,卫导gnss接收惯性导航设备的数据,在定位数据域进行卫导/惯导数据组合,在gnss卫星信号延时、中断、短时信号失锁(≤15s)场景下提高了差分系统可用性。
- 还没有人留言评论。精彩留言会获得点赞!