一种鲁棒SINSUSBL组合导航方法、装置及系统
本申请属于导航,具体涉及一种鲁棒sins/usbl组合导航方法、装置及系统。
背景技术:
1、水下导航技术在深海勘测、海洋资源开发、海洋科学研究和军事应用中扮演着至关重要的角色。在水下复杂多变的环境中,确切的位置、方向和轨迹数据对于水下器械和航行器的安全运行和任务成功执行至关重要。
2、sins/usbl组合是常用的水下导航方案,sins系统通过高精度的加速度和角速度测量来实现导航,而usbl系统则利用声波信号和水下参考点进行位置定位。尽管这两种系统在多数情况下表现出色,但在复杂水下环境中,水介质中存在海底和水面的层状折射和反射现象,使得声波发射点和声波接收点之间产生多径效应,进而产生包括观测噪声和离群值在内的负面影响。
3、观测噪声通常源于多种不确定因素,包括传感器误差、水下环境的复杂性以及系统的内在不确定性,这些因素可能导致导航数据的不稳定性。特别是厚尾噪声表现出的更大波动性,极大地影响了导航精度。此外,观测中的离群值可能对导航数据造成严重的干扰,这些离群值通常是由于传感器故障、水下环境变化或异常事件所致。所以,寻求新的解决方案以提高sins/usbl水下导航系统的准确性和稳定性显得至关重要。
4、相关技术提出了一种基于广义极大似然估计(m估计)的滤波算法,特别适用于系统量测噪声为非高斯分布,尤其是混合高斯分布条件下。该算法被应用于sins/usbl组合导航系统中,解决了水声传感器由于多径效应引起的非高斯量测噪声和量测异常的问题。在量测异常峰值较大的情况下,通过影响函数与权值函数对量测残差与状态预测残差进行加权,从而减小量测异常峰值对导航系统的影响。
5、相关技术的缺点是该基于m估计的auv组合导航方法在处理观测噪声时表现出一定的敏感性,尤其对于噪声中的野值(outliers)。m估计通过影响函数和权值函数对残差进行加权,而在存在观测噪声野值的情况下,这种加权可能导致过度的耦合,使系统对极端噪声更为敏感。这种耦合效应可能导致系统在处理野值时产生不稳定的反应,从而影响导航系统的准确性和鲁棒性。
技术实现思路
1、本申请实施例的目的是提供一种鲁棒sinsusbl组合导航方法、装置及系统,其针对现有sins/usbl组合导航系统在复杂水下环境中因厚尾噪声出现的干扰观测离群值的问题,提供了一种优化的广义最大似然估计算法来约束残差和位置影响,进一步解决脉冲观测噪声野值的问题,可以有效提升系统在复杂水下环境中存在混合高斯噪声影响下的鲁棒性,改善观测噪声异常值,进而提高sins/usbl的组合导航精度,从而可以解决背景技术中涉及的至少一个技术问题。
2、为了解决上述技术问题,本申请是这样实现的:
3、一方面,本申请实施例提供了一种鲁棒sinsusbl组合导航方法,包括以下步骤:
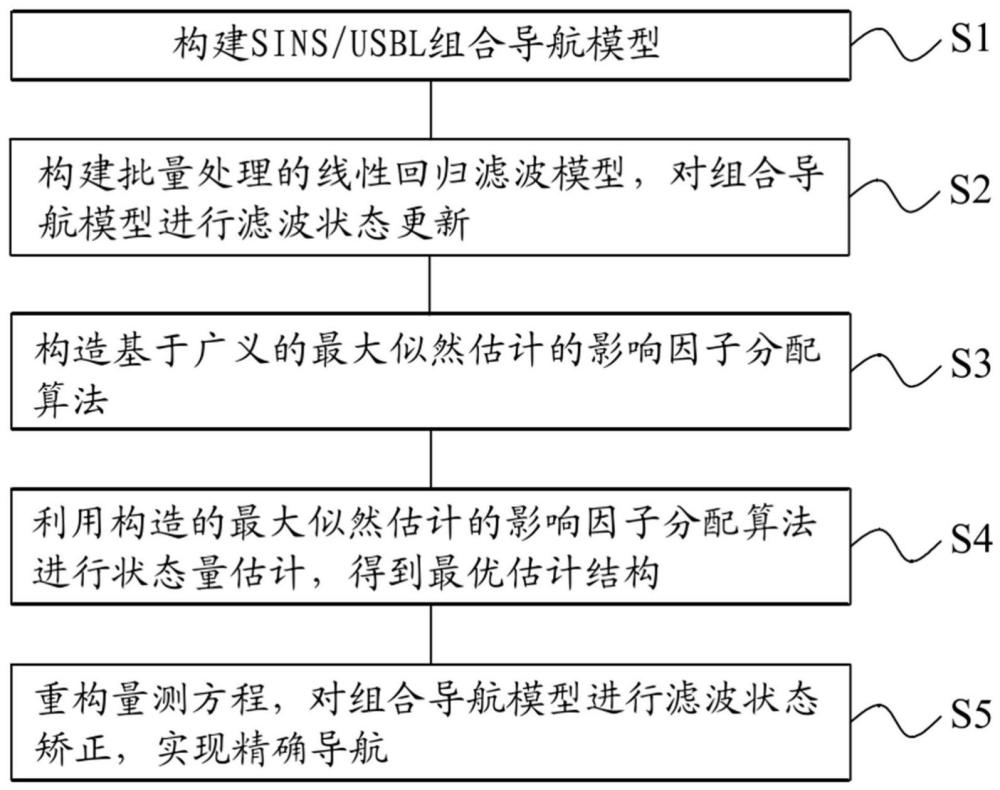
4、步骤s1,构建sins/usbl组合导航模型;
5、步骤s2,构建批量处理的线性回归滤波模型,对组合导航模型进行滤波状态更新;
6、步骤s3,构造基于广义的最大似然估计的影响因子分配算法;
7、步骤s4,利用构造的最大似然估计的影响因子分配算法进行状态量估计,得到最优估计结构;
8、步骤s5,重构量测方程,对组合导航模型进行滤波状态矫正,实现精确导航。
9、又一方面,本申请实施例提供了一种用于实现所述的方法的鲁棒sinsusbl组合导航装置,包括:
10、sins定位模块,其包括光纤惯导,装载于rov上,用以解算rov载具的位置、速度和姿态信息;
11、所述usbl定位模块,其包括usbl换能基阵和装载于rov上的usbl应答器,借助usbl换能基阵发射短脉冲声波,测量rov的角度及斜距信息,每个usbl换能基阵在声波发射后,usbl应答器在接收到usbl换能基阵所发声波后,反馈声波至usbl换能基阵的接收器,通过比较各接收器的到达时间差,usbl定位模块利用三角法精确计算水下航行器相对于发射器的三维位置;以及
12、导航计算机,其用以导航数据解算,包括优化的最大似然估计影响因子状态估计模型以及回归卡尔曼滤波器;其中,优化的最大似然估计影响因子状态估计模型的影响因子函数需在应用权重方差矩阵之前进行一步反转操作;回归卡尔曼滤波器以回归状态的回归滤波模型代替基本卡尔曼滤波器中的滤波模型,并进行滤波状态更新操作,将位置、速度及姿态误差回馈至捷联解算器当中,将硬件误差回馈至imu中,进行误差补偿操作,输出多传感器融合定位信息。
13、再一方面,本申请实施例提供了一种用于实现所述的方法的鲁棒sinsusbl组合导航系统,包括:
14、模型构建模块,其用于构建sins/usbl组合导航模型;
15、滤波状态更新模块,其用于构建批量处理的线性回归滤波模型,对组合导航模型进行滤波状态更新;
16、算法构造模块,其用于构造基于广义的最大似然估计的影响因子分配算法;
17、状态量估计模块,其用于利用构造的最大似然估计的影响因子分配算法进行状态量估计,得到最优估计结构;以及
18、滤波状态矫正模块,其用于重构量测方程,对组合导航模型进行滤波状态矫正,实现精确导航。
19、本申请相较于现有技术具有以下有益效果:
20、1、本申请针对传统的广义最大似然估计算法对低概率产生的无效观测异常值不能有效剔除的情况,提供了一种优化的广义最大似然估计算法来约束残差和位置影响,对因极低概率非有效观测残差引起的滤波问题进行了解耦处理和优化;
21、2、本申请针对基础卡尔曼滤波器效率较低的问题,对其进行回归处理,提高解算效率,故,相较于传统的抗扰动滤波算法,本申请在复杂水下环境中具有混合高斯噪声影响的情况下,通过改善对观测噪声异常值的处理,进一步提高了sins/usbl组合导航的鲁棒性与抗差能力,保证在出现较大异常值的情况下,对测量信息的影响最小,既可以保证过滤精度和抵抗较大异常值的能力,又可以提高整个滤波系统的驱动作用;
22、3、相较于传统的sins/usbl组合导航解算系统安装于水下航行器上,本申请将导航解算系统从水下航行器中分离,转移到水上导航计算机平台上进行结算,此举显著减小了系统的耦合性,从而更容易在不同平台上实施,并能够适应多样化的任务和环境;
23、4、本申请通过引入水上导航计算机,极大地简化了导航系统的部署和维护过程,更易于与不同类型的水下载具进行适配,同时简化了与其他舰载设备和系统的集成,减少了设备连接和校准的复杂性,降低了与水下环境相关的一系列工程风险,如水压、腐蚀等,并且可提升系统的可靠性和稳定性。
技术特征:
1.一种鲁棒sinsusbl组合导航方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,步骤s1中,建立sins/usbl组合导航模型,包括建立组合导航状态方程和组合导航量测方程,具体包括:
3.根据权利要求2所述的方法,其特征在于,步骤s2中,批量处理的线性回归滤波模型,由下式表示为:
4.根据权利要求3所述的方法,其特征在于,步骤s3中,构造基于广义最大似然估计的影响因子分配算法,包括:
5.根据权利要求4所述的方法,其特征在于,步骤s4中,采用下式进行状态估计:
6.根据权利要求5所述的方法,其特征在于,步骤s5中,组合导航模型的状态值与量测值如下:
7.一种用于实现权利要求1-6任意一项所述的方法的鲁棒sinsusbl组合导航装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,所述姿态包括横摇角、纵摇角以及艏摇角。
9.一种用于实现权利要求1-6任意一项所述的方法的鲁棒sinsusbl组合导航系统,其特征在于,包括:
技术总结
本申请公开了一种鲁棒SINSUSBL组合导航方法、装置及系统,属于导航技术领域。该方法包括以下步骤:构建SINS/USBL组合导航模型;构建批量处理的线性回归滤波模型,对组合导航模型进行滤波状态更新;构造基于广义的最大似然估计的影响因子分配算法;利用构造的最大似然估计的影响因子分配算法进行状态量估计,得到最优估计结构;重构量测方程,对组合导航模型进行滤波状态矫正,实现精确导航。本申请提供了一种优化的广义最大似然估计算法来约束残差和位置影响,解决脉冲观测噪声野值的问题,可以有效提升系统在复杂水下环境中存在混合高斯噪声影响下的鲁棒性,改善观测噪声异常值,进而提高SINS/USBL的组合导航精度。
技术研发人员:边有钢,李政天,王广才,胡满江,丁荣军,秦晓辉,秦洪懋,徐彪,秦兆博,王晓伟,谢国涛
受保护的技术使用者:湖南大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!