无人机飞行勘测方法、设备及介质
本发明涉及无人机勘测路径规划,尤其涉及一种无人机飞行勘测方法、相应电子设备及计算机可读存储介质。
背景技术:
1、中国部分农业生产是在山地地区,但在农业生产过程中,经常需要对农业生产进行勘测工作。而传统勘测方式一般为人力监测或使用一些简单的测量工具,对地形复杂的地区来说,具有一定的局限性,需要付出大量的人力成本,存在勘测慢、勘测不精准、勘测危险等问题。相比于传统的勘测方法,使用无人机进行勘测工作可以大大提高勘测效率,扩大勘测范围,减少勘测风险。随着对大范围农业高频次勘测的需求不断增加,无人机勘测的优势越来越明显。
2、现有的无人机勘察路径规划方式中还存在以下两个方面的问题:
3、1、未对通信强度对无人机勘测造成的影响进行考虑与分析,如5g通信强度会影响实时数据、勘测图像的传输。未对静态障碍物造成的影响进行考虑与分析,如静态障碍物的高度和最小外接圆半径决定着路径光滑度。未对无人机紧急情况进行考虑与分析,如无人机离紧急降落点的距离会影响无人机在遇紧急情况能否更好地前往紧急降落点避险。
4、2、未对无人机勘测路径的飞行方案进行多级评估与分析,即未对影响飞行方案优劣度中的安全程度和航迹复杂度进行一级评估与分析。未对影响安全程度、航迹复杂度的因素进行二级评估与分析,无法更客观、全面的评价飞行方案是否符合实际需求。
技术实现思路
1、本技术的目的在于解决上述问题而提供一种无人机飞行勘测方法、相应电子设备及计算机可读存储介质。
2、本发明解决上述技术问题的技术方案是:
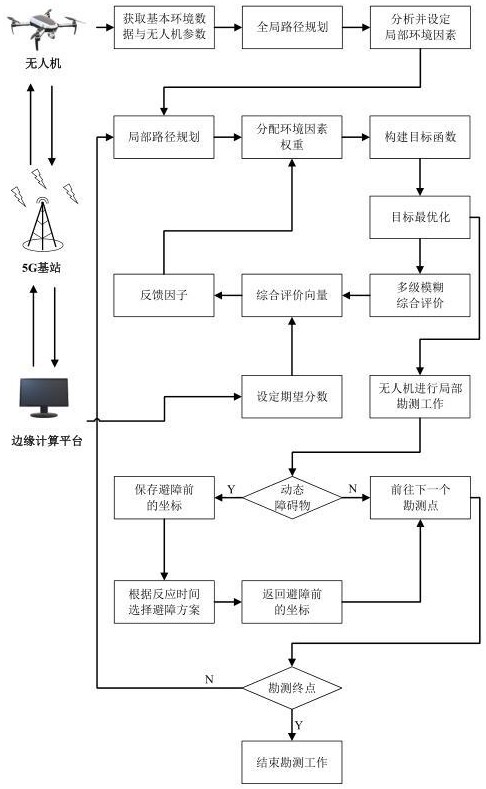
3、一种无人机飞行勘测方法,包括以下步骤:
4、s1、获得基本环境数据与无人机的参数数据;
5、s2、建立无人机与边缘计算平台之间的通信,进行全局初始路径规划;
6、s3、分析并设定局部环境因素,对全局路径规划进行局部划分;
7、s4、进行局部路径的规划,得到局部勘测区域的飞行方案;
8、s5、对局部勘测区域的飞行方案进行多级模糊综合评价,选择符合要求的飞行方案作为该局部勘测区域的最佳飞行方案;
9、s6、得到最佳飞行方案后,无人机开始执行局部勘测工作,在飞行过程中,无人机进行动态避障,直至无人机到达下一勘测点;若下一勘测点为全局勘测终点,则无人机降落,结束勘测工作;若下一勘测点不为全局勘测终点,则跳转回步骤s4,进入下一区域的路径规划,并重复步骤s5和步骤s6。
10、优选的,在步骤s1中,预先获得勘测区的地图数据及地图上方特定高度内的空域数据,并根据基本环境数据设定无人机实际运行参数;其中,
11、所述基本环境数据的获取方法为:
12、测量勘测区上方的空域内的5g信号和gps信号的强度大小,并在地图中划分5g信号和gps信号的强度等级与等级衰减范围;同时在地图中若存在静态障碍物,需获取该静态障碍物的高度与最小外接圆半径;
13、所述无人机实际运行参数的设定方法为:
14、根据基本环境数据设定无人机最高安全飞行高度hfmax与最低安全飞行高度hfmin;根据无人机实际性能参数情况设定最小惯性移动距离lmin;根据无人机实际参数设定最小转弯半径rmin,在转弯过程中需使转向半径r>rmin;根据无人机参数与电池续航参数设定全局最大航程sgmax。
15、优选的,在步骤s2中,取勘测区域内每个待勘测点坐标,并在步骤s1所得到的基本环境数据与无人机的参数数据的约束下,对勘测区域的中心点坐标进行全局最优路径规划,确定每个勘测点的勘测顺序;无人机勘测过程中将实时数据发送至边缘计算平台;同时,无人机在勘测过程中需使用5g通信与勘测中心之间进行实时图传。
16、优选的,在步骤s3中,对全局路径规划进行局部划分的步骤为:
17、将当前勘测点pi作为起点,下一勘测点pi+1作为终点,起点与终点之间的区域设为一个局部勘测区域bi,其中的i表示第某个待勘测区域的编号,i=1,2,……,n。
18、优选的,在步骤s3中,设定局部环境因素的步骤为:
19、a1、设定局部勘测区域内无人机改变飞行姿态前的每一段飞行距离为sip,每一段飞行距离sip需要大于无人机最小惯性移动距离lmin;
20、a2、设定第i个勘测区域内的第p段飞行航迹的5g信号强度为gip,其中,0<gip<1,gip值越大,则代表5g信号强度越强;
21、a3、设定gps信号强度为fip,其中,0<fip<1,fip值越大,则代表gps信号强度越强;
22、a4、设定静态障碍物的高度为hij,绕过静态障碍物的最小外接圆所需飞行弧长为aij,其中,i表示第i个待勘测区域的编号,i=1,2,……,n;j表示第i个待勘测区域内的第j个静态障碍物的编号,j=1,2,……,m;
23、a5、设定局部勘测区域内无人机改变飞行姿态前的每一段飞行距离sip的中点到最近紧急降落点的距离为dip。
24、优选的,在步骤s4中,建立目标函数,通过目标函数进行路径规划,得到一个局部勘测区域的飞行方案。
25、优选的,在步骤s5中,对局部勘测区域的飞行方案利用多级模糊综合评价进行方案评估,分别得到安全程度模糊综合评价向量、航迹复杂度模糊综合评价向量、飞行方案优劣度模糊综合评价向量与分数;将飞行方案优劣度评价得分与期望得分进行比较,若飞行方案优劣度评价得分大于期望得分,则说明飞行方案满足决策者要求;若飞行方案优劣度评价得分小于期望得分,则说明飞行方案不满足决策者要求,则返回步骤s4中,并引入定向因子反馈至步骤s4的局部勘测区域路径规划中,进行该局部勘测区域的飞行方案的重新规划。
26、优选的,在步骤s6中,无人机通过5g通信接收通过边缘计算平台计算出的局部勘测区域的飞行方案后,结束待机状态,无人机开始执行局部勘测工作;若无人机在勘测过程中发现动态障碍物,则跳转至步骤s6(a);若无人机在勘测过程中未发现动态障碍物,则正常工作直至进入下一勘测点,进入步骤s6(b);其中,
27、s6(a)、无人机发现动态障碍物后,保存进行动态避障前的坐标;根据反应时间的长短,判断动态障碍物的威胁程度,选择不同的动态避障方案进行避障,动态避障结束后,无人机返回动态避障前保存的坐标,回到正常工作状态,继续执行原来的局部勘测区域的飞行方案;
28、s6(b)、无人机到达下一勘测点,若下一勘测点为全局勘测终点,则无人机降落,结束勘测工作:无人机到达勘测终点,下降至降落点并结束勘测工作;若下一勘测点不为全局勘测终点,则跳转回s4步骤,进入下一区域的路径规划。
29、一种电子设备,包括中央处理器和存储器,所述中央处理器用于调用运行存储于所述存储器中的计算机程序以执行所述的无人机飞行勘测方法的步骤。
30、一种计算机可读存储介质,其特征在于,其以计算机可读指令的形式存储有依据权利要求1至8中任意一项所述的无人机飞行勘测方法所实现的计算机程序,该计算机程序被计算机调用运行时,执行相应的方法所包括的步骤。
31、本发明与现有技术相比,具有如下优点和有益效果:
32、(1)本发明的无人机飞行勘测方法通过全局最优路径来确定勘测点作业顺序,再对勘测点与勘测点之间的局部勘测区域进行路径规划;规划出的飞行方案能更综合地考虑安全程度、航迹复杂度因素,使得飞行方案更符合实际需求与决策者的意愿,并减少了了无人机勘测过程中的危险,提高了勘测效率,为农业生产中的勘测工作提供了帮助和方向。
33、(2)本发明的无人机飞行勘测方法通过对局部勘测区域的飞行方案进行多级模糊综合评价,从而能够从主观和客观两个层面对飞行方案的优劣进行综合评估,这有助于制定更为综合、科学的飞行方案,提高飞行的安全性和效率。
- 还没有人留言评论。精彩留言会获得点赞!