一种基于数据相关性的工业仪表故障检测方法
本发明涉及工业仪表,特别涉及一种基于数据相关性的工业仪表故障检测方法。
背景技术:
1、传统的智能电表在线监测方法主要依赖于内部集成的多传感器数据,如电流、电压、温度、功率因素、负荷识别等传感器数据。通常基于对各传感器数据稳定性和准确性的假设,通过数据驱动分析或结合物理机理模型的方法来评估电表的整体运行状态。然而,随着使用时间的增长和外部环境因素的影响,智能电表内部的传感器可能出现漂移、老化甚至失效等性能退化问题,这将导致采集的监测数据产生偏差,严重影响到对电表精确工作状态的判断能力。
2、目前市场上的智能电表系统内,针对传感器实时状态监测的功能尚不完善,大多仍需依靠定期的人工巡检和校准手段来保证传感器的正常运行。这种滞后的方式无法及时捕捉并应对在电表实际运行过程中出现的传感器状态异常状况,极大地限制了对智能电表整体运行状态进行有效、实时监控的能力。
3、当然,也采用深度学习模型判断智能电表是否故障,但深度学习模型需要大量经标注的正常运行数据和异常运行数据,对数据的数量和质量都有较高的要求。
技术实现思路
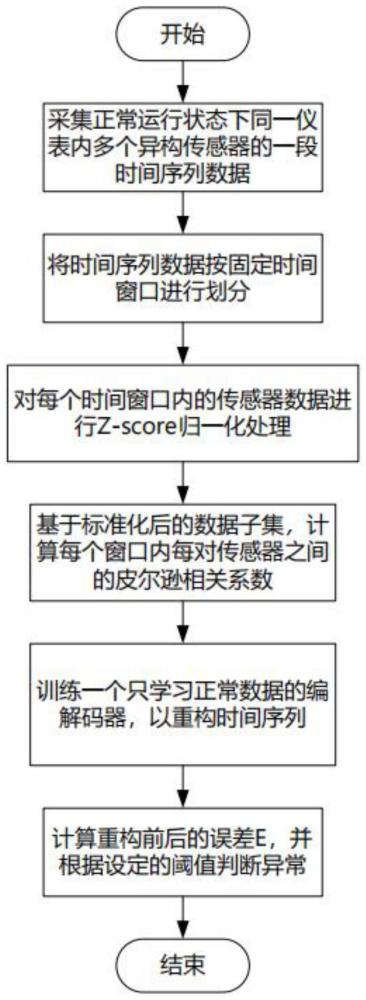
1、本发明公开了一种基于数据相关性的工业仪表故障检测方法,它可以直接利用现有的正常运行监测数据资源来实施传感器故障的自动识别。
2、它通过这样的技术方案实现的,具体方法如下:
3、确定待检测工业仪表内的若干传感器;
4、获取待检测工业仪表所有传感器的实时数据;
5、根据实时数据,计算每两个传感器的相关系数矩阵;
6、将实时数据的相关系数矩阵依次输入lstm编码器和lstm解码器进行重构;
7、根据重构误差平方和判断工业仪表是否故障;
8、所述lstm编码器和lstm解码器由工业仪表正常运行时的历史数据训练。
9、进一步地,计算每两个传感器的相关系数矩阵,具体包括:
10、针对实时数据,进行时间窗口划分;
11、对窗口数据进行归一化;
12、根据归一化数据,计算相关系数矩阵。
13、进一步地,假设工业仪表内部有n个异构传感器,每个传感器在时间序列上产生m个连续的数据点,获取待检测工业仪表所有传感器的实时数据,表示为:
14、
15、其中,xi,j表示第i个传感器在第j个时间点上的测量值,i∈{1,2,...,n}代表不同的传感器,j∈{1,2,...,m}代表对应的时间点。
16、进一步地,时间窗口划分,具体方法如下:
17、将实时数据d按照预设的时间窗口w进行等间隔划分,得到时间窗口数据集dw,假设每个窗口包含w个连续的数据点。那么对于第i(i=1,2,...,n)个时间窗口,可以得到一个新的子数据集di表示为:
18、
19、其中,xj,k表示第j个传感器处于第i个时间窗口内第k个时间点上的测量值,j∈{1,2,...,n}代表不同的传感器,k∈{(i-1)w+1,(i-1)w+2,...,iw}代表第i个时间窗口内的各个时间点;
20、所有划分后的窗口数据集组成的新集合可以表示为:
21、
22、其中,包含了所有按照固定时间窗口w划分后得到的数据子集。
23、进一步地,对窗口数据进行归一化,具体方法如下:
24、对于传感器j在窗口i中的数据序列计算均值和标准差
25、将每个数据点标准化,得到标准化后的子数据集
26、
27、进一步地,计算相关系数矩阵,具体方法如下:
28、基于标准化后的数据子集可以计算每个窗口内每对传感器j和k之间的皮尔逊相关系数:
29、
30、其中,和分别表示第j个和第k个传感器在时间窗口i内的第t个时间点上的标准化后的测量值。和分别是第j个和第k个传感器在时间窗口i内标准化后的所有测量值的平均值;
31、生成皮尔逊相关系数矩阵ri:
32、
33、得到所采集的整个时间序列上每一对传感器的皮尔逊相关系数数据矩阵v:
34、
35、将相关系数矩阵v按时间窗口划分,第i个时间窗口的所有皮尔逊相关系数记为yi:
36、皮尔逊相关系数数据矩阵v又可以表示为:
37、y=v=[y1,y2,…,yn]。
38、进一步地,根据重构误差平方和判断工业仪表是否故障,具体方法如下:
39、将实时数据转换的皮尔逊相关系数数据矩阵v依次输入到训练好的lstm编码器和lstm解码器中,进行重构;
40、计算重构误差平方和作为输入序列的异常得分a,具体计算公式为:
41、
42、故障判断公式为:
43、
44、进一步地,由工业仪表正常运行时的历史数据训练lstm编码器和lstm解码器,具体方法如下:
45、给定正常数据样本是长度为n的多变量相关性时间序列y=[y1,y2,…,yn],其中在每个时间点ti上,yi∈rm是一个m维向量,代表了m个传感器在同一时刻的读数;
46、训练lstm编码器时,其将输入时间序列y映射到一个固定维度的向量表示:
47、
48、其中表示编码器在时间步ti的隐藏状态,c是编码器隐藏层中lstm单元的数量,而θe表示编码器网络的参数;
49、训练lstm解码器时,利用固定维度的向量he表示来反向重构时间序列,对于解码器,其在时间步ti的隐藏状态为:
50、
51、其中,是由上一时间步的预测值yi和编码器的最终状态计算得出,而θd表示解码器网络的参数;
52、在解码过程中,通过带有权重矩阵w和偏置向量b的线性层,结合解码器当前隐藏状态来预测下一个时间步的目标值
53、
54、模型的训练目标是最小化整个训练序列集y=[y1,y2,…,yn]上所有时间点的重构误差平方和最小;
55、重构误差平方和计算公式如下:
56、
57、由于采用了以上方案,本发明具有以下有益效果:
58、1、充分利用智能电表内部多个传感器同步采集的监测数据,利用各传感器之间的数据相关性和深度学习算法实现在各个传感器的工作状态监测;
59、2、本发明无需对现有智能电表监测系统进行大规模硬件升级,而是直接利用现有的监测数据资源来实施传感器故障的自动识别。
60、3、运用此方法,仅当检测出特定传感器存在故障时,才需要对其进行维护和校准操作,从而显著降低人力资源成本和运维复杂度。
61、4、在训练阶段,本发明仅采用正常运行状态下获取的传感器数据作为输入,降低了对故障样本数据的依赖性,有望克服传统监测手段存在的传感器状态监测滞后、准确性低等问题,为智能电表的在线监测提供更加高效、可靠的技术解决方案。
- 还没有人留言评论。精彩留言会获得点赞!