深度计算方法、TOF深度相机和计算机可读存储介质与流程
本申请实施例涉及图像处理领域,尤其涉及一种深度计算方法、tof深度相机和计算机可读存储介质。
背景技术:
1、在tof深度相机实际应用环境中,tof深度相机除了接收待测物直接反射回的反射脉冲光之外,还有一些其他非直接反射光,而这些非直接反射光被部分像素接收后,会引起多路径现象导致这些像素的深度误差。
技术实现思路
1、本申请实施例提供一种深度计算方法、tof深度相机和计算机可读存储介质,能够减少深度误差。
2、第一方面,提供一种深度计算方法,应用于tof深度相机,包括:获取所述tof深度相机采集的包括目标区域的原始相位图像,并获取所述原始相位图像中至少部分像素对应的psf模型,其中,所述至少部分像素中的每个像素对应一个psf模型;将所述原始相位图像、所述psf模型和所述tof深度相机的理想相位图像在空域上的卷积关系转换至频域,并在频域上利用所述原始相位图像和所述psf模型获得所述理想相位图像;对所述理想相位图像进行深度计算,得到所述目标区域的深度信息。
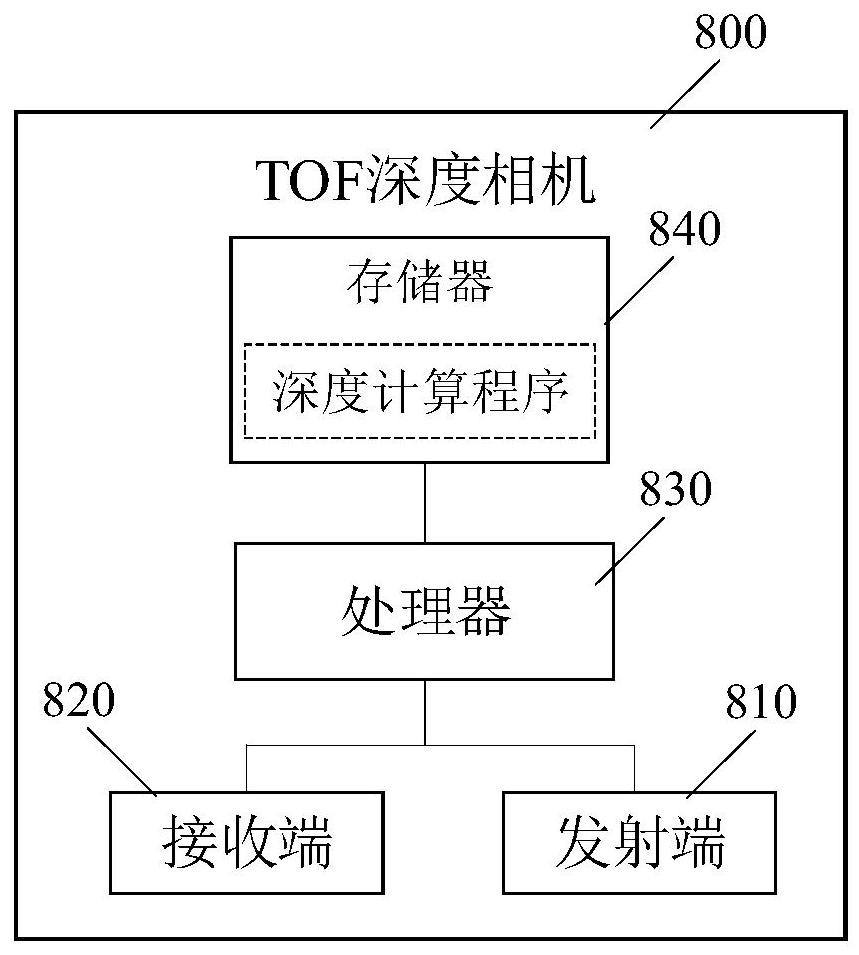
3、第二方面,提供了一种tof深度相机,包括发射端、接收端和处理器,所述发射端用于向目标区域投射周期性调制的发射光信号,所述接收端用于采集经所述目标区域发射回的接收光信号生成原始相位图像,所述处理器用于利用第一方面及其任一种可能的实现方式中所述的深度计算方法对所述原始相位图像进行处理得到所述目标区域的深度信息。
4、第三方面,提供一种计算机可读存储介质,用于存储计算机程序,所述计算机程序使得计算机执行第一方面及其任一种可能的实现方式中所述的深度计算方法。
5、第四方面,提供了一种芯片,包括处理器,用于从存储器中调用并运行计算机程序,使得安装有芯片的设备执行第一方面及其任一种可能的实现方式中所述的深度计算方法。
6、第五方面,提供了一种计算机程序,计算机程序使得计算机执行第一方面及其任一种可能的实现方式中所述的深度计算方法。
7、第六方面,提供了一种程序产品,包括计算机可读代码,或者承载有计算机可读代码的非易失性计算机可读存储介质,当计算机可读代码在电子设备中运行时,电子设备中的处理器执行第一方面及其任一种可能的实现方式中所述的深度计算方法。
8、基于以上技术方案,先获取tof深度相机采集的包括目标区域的原始相位图像以及原始相位图像中至少部分像素对应的psf模型,其中每个像素对应一个psf模型,其次,再将原始相位图像、psf模型和tof深度相机的理想相位图像在空域上的卷积关系转换至频域,并在频域上利用原始相位图像和psf模型获得理想相位图像,随后再对理想相位图像进行深度计算,得到目标区域的深度信息。由于图像中存在多个像素,且像素间差异可能导致每个像素对应的psf模型不相同,针对每个像素建立对应的psf模型,能够更准确地获得理想情况下的原始相位图像,达到缓解深度误差的目的。另外,由于计算过程中需要多个psf模型,导致计算量增加,对于此,通过将原始相位图像、psf模型和理想相位图像在空域上的卷积关系转换至频域,并在频域上利用原始相位图像和psf模型获得理想相位图像,由于空域的卷积在频域上表现为相乘,因此能够减少运算量。这样,在降低深度误差的情况下,也不会带来较大的计算量。
技术特征:
1.一种深度计算方法,应用于tof深度相机,其特征在于,包括:
2.根据权利要求1所述的深度计算方法,其特征在于,所述tof深度相机包括发射端和接收端,所述获取所述原始相位图像中至少部分像素对应的psf模型,包括:
3.根据权利要求1所述的深度计算方法,其特征在于,所述获取所述原始相位图像中至少部分像素对应的psf模型,包括:
4.根据权利要求3所述的深度计算方法,其特征在于,所述整合所述第一psf模型和所述第二psf模型,获取整合后的psf模型,包括:
5.根据权利要求4所述的深度计算方法,其特征在于,所述第一psf模型中的部分像素区域为所述第一psf模型中的中心像素区域,所述第二psf模型中的部分像素区域为所述第二psf模型的中心像素区域。
6.根据权利要求1至5中任一项所述的深度计算方法,其特征在于,所述将所述原始相位图像、所述psf模型和所述tof深度相机的理想相位图像在空域上的卷积关系转换至频域,并在频域上利用所述原始相位图像和所述psf模型获得所述理想相位图像,包括:
7.根据权利要求1至5中任一项所述的深度计算方法,其特征在于,所述将所述原始相位图像、所述psf模型和所述tof深度相机的理想相位图像在空域上的卷积关系转换至频域,并在频域上利用所述原始相位图像和所述psf模型获得所述理想相位图像,包括:
8.根据权利要求7所述的深度计算方法,其特征在于,所述在利用所述频域原始相位图像和所述频域psf模型获得所述频域理想相位图像的过程中,加入所述tof深度相机的系统噪声参数,以去除所述频域理想相位图像中的噪声信号,得到降噪后的所述频域理想相位图像,包括:
9.根据权利要求8所述的深度计算方法,其特征在于,所述将所述频域计算结果与所述原始相位图像相乘,获得降噪后的所述频域理想相位图像,包括:
10.一种tof深度相机,其特征在于,包括发射端、接收端和处理器,所述发射端用于向目标区域投射周期性调制的发射光信号,所述接收端用于采集经所述目标区域发射回的接收光信号生成原始相位图像,所述处理器用于利用权利要求1至9中任一项所述的深度计算方法对所述原始相位图像进行处理得到所述目标区域的深度信息。
11.一种计算机可读存储介质,其特征在于,用于存储计算机程序,所述计算机程序使得计算机执行权利要求1至9中任一项所述的深度计算方法。
技术总结
本申请提供一种深度计算方法、TOF深度相机和计算机可读存储介质,能够减少深度误差。深度计算方法应用于TOF深度相机,包括:获取TOF深度相机采集的包括目标区域的原始相位图像,并获取原始相位图像中至少部分像素对应的PSF模型,其中,至少部分像素中的每个像素对应一个PSF模型;将原始相位图像、PSF模型和TOF深度相机的理想相位图像在空域上的卷积关系转换至频域,并在频域上利用原始相位图像和PSF模型获得理想相位图像;对理想相位图像进行深度计算,得到目标区域的深度信息。
技术研发人员:俞涛,林时雨,师少光
受保护的技术使用者:深圳奥芯微视科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!