一种车辆定位和车厢尺寸的测量系统和方法
本发明涉及车辆轮廓测量。
背景技术:
1、在物流行业高速发展的今天,装物料装车作业一直是一个耗时费力的重要环节。不仅需要大量的工人搬运和装载,而且效率相对较低。尤其是当涉及到袋装水泥、腻子粉等化工产品的装车任务时,还可能带来安全隐患。
2、为了提高装车效率,并且确保装车的准确性,自动物料装车设备开始慢慢出现。自动物料装车设备可以代替人工完成货物的装载工作,能够快速准确地完成货物的装载,提高装车效率,减少人力成本。
3、当前市面上存在以下几种方式:
4、1、地面划线和人工测量的方式;
5、a)该方式操作比较简单,但对司机的要求比较高;
6、b)人工测量误差比较大,无法获取准确的数据;
7、2、单侧测距的方式;
8、a)结构比较简单;
9、b)只能获取简单定位信息,无法获得车厢内部的信息;
10、3、三维建模的方式;
11、a)获取的信息比较全面;
12、b)计算量大,容易车辆内部形状的干扰。
技术实现思路
1、本发明所要解决的技术问题是实现一种基于激光扫描的确认车辆定位和车厢尺寸的方法。
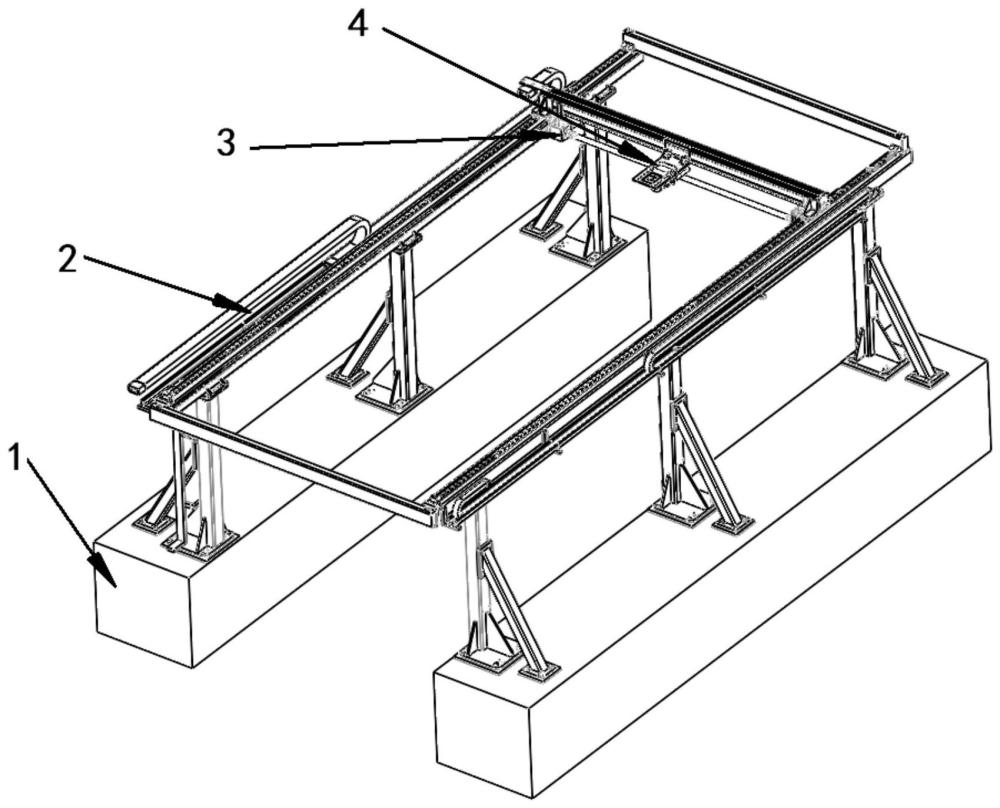
2、为了实现上述目的,本发明采用的技术方案为:一种车辆定位和车厢尺寸的测量系统,地基平台中间设有车辆通行和停放的通道,所述地基平台上方固定有整体框架,所述整体框架上设有两条沿通道方向设置轨道,两条所述轨道上设有沿轨道滑动的桁架,所述桁架上设有与通道垂直的滑轨,所述滑轨上安装有安装板,所述安装板的下表面设有采集车辆信息的激光传感器,所述桁架上设有驱动桁架沿轨道运动的纵向驱动机构,所述安装板上设有驱动安装板沿滑轨运动的横向驱动结构。
3、所述防尘罩通过连杆连接移动气缸的气缸杆,所述防尘罩由移动气缸控制开合状态;系统设有总控系统,所述总控系统与激光传感器、纵向驱动机构、横向驱动机构、移动气缸通信,所述激光传感器外设有防尘罩。
4、一种基于所述车辆定位和车厢尺寸的测量系统的测量方法,包括以下步骤:
5、步骤1、读取扫描获得的桁架的位置和激光传感器扫描的数据;
6、步骤2、对上述数据进行处理;
7、步骤3、每帧数据的中间位置处理;
8、步骤4、每帧数据的左侧位置处理;
9、步骤5、每帧数据的右侧位置处理;
10、步骤6、滑动窗口处理多帧数据,计算车头和车尾的位置;
11、步骤7、数据汇总获得车辆的长度和宽度,以及车辆本身位置。
12、所述步骤2包括以下步骤:
13、1)将每帧数据中的距离和角度值转换成y和z方向的值;
14、2)将桁架的位置加入每帧数据,将每帧数据转化为空间位置点xyz;
15、3)对每帧数据进行滤波处理。
16、所述步骤3包括以下步骤:
17、1)将每帧数据中间位置计算均值m1;
18、2)判断m1的高度是否满足指定的范围,如果是则记录n1=1,否则记录n1=0。
19、所述步骤4包括以下步骤:
20、1)初始赋值:
21、取每帧中间位置的id,记为k1;左侧位置的值,记为k2
22、2)循环处理:
23、k2循环加1;
24、判断k2-k1的高度值是否大于设定值,如果是则继续,如果否则将k2赋值给k1;
25、循环处理直至左侧数据结束;
26、3)记录左侧的位置为m2;
27、4)判断最终k1的位置是否在指定范围,如果是则记录n2=1,否则记录n2=0。
28、所述步骤5包括以下步骤:
29、1)初始赋值:
30、取每帧中间位置的id,记为k3;右侧位置的值,记为k4;
31、2)循环处理:
32、k4循环加1;
33、判断k4-k3的高度值是否大于设定值(门板位置每个点会有高度增加),如果是则继续,如果否则将k4赋值给k3
34、循环处理直至右侧数据结束;
35、3)记录右侧位置为m3
36、4)判断最终k3的位置是否在指定范围(门板位置会在右侧一定区域内),如果是则记录n3=1,否则记录n3=0。
37、所述步骤6包括以下步骤:
38、1)设置滑动窗口,窗口长度为l;
39、2)扫描的方向从头到尾,循环提取帧数为l的上述多帧数据的处理结果;
40、3)判断第一次满足多帧数据中n1、n2、n3的满足一定数量,所述一定数量小于窗口内所有值满足1的数量,则表示车厢起始位置s,前面的位置则为地面和车头的位置;
41、4)获取车厢起始位置后,继续循环判断,窗口每帧数据n1、n2、n3第一次不满足一定数量为1,则该位置则为车厢结束位置t。
42、5)通过起始位置s的m1、m2和m3,以及结束位置t的m1、m2和m3的值,计算出车辆的长度和宽度,以及车辆本身位置。
43、所述步骤7包括以下步骤:
44、1)起始位置s的m1、m2和m3,记为m1_s、m2_s和m3_s,结束位置t的m1、m2和m3,记为m1_t、m2_t和m3_t
45、2)m2_s和m3_s的差为车辆宽度,m2_t和m3_t的差也是车辆宽度;
46、3)m2_s和m2_t的差为车辆长度,m3_s和m3_t的差也是车辆长度;
47、4)m1_s和m1_t为车厢的两头的高度。
48、5)通过激光传感器相对桁架的位置,换算获得实际的车辆定位和车厢尺寸。
49、本发明的优点在于:
50、1、计算量小,处理的效率很高;
51、2、对车辆本身规格以及停放的位置要求比较低,不要求车辆停的很直;
52、3、可获取车辆位置和车厢内的尺寸;
53、4、计算精度很高,可以获取车厢前后宽度差异,和车厢长度方向差异。
技术特征:
1.一种车辆定位和车厢尺寸的测量系统,其特征在于:地基平台中间设有车辆通行和停放的通道,所述地基平台上方固定有整体框架,所述整体框架上设有两条沿通道方向设置轨道,两条所述轨道上设有沿轨道滑动的桁架,所述桁架上设有与通道垂直的滑轨,所述滑轨上安装有安装板,所述安装板的下表面设有采集车辆信息的激光传感器,所述桁架上设有驱动桁架沿轨道运动的纵向驱动机构,所述安装板上设有驱动安装板沿滑轨运动的横向驱动结构。
2.根据权利要求1所述车辆定位和车厢尺寸的测量系统,其特征在于:所述防尘罩通过连杆连接移动气缸的气缸杆,所述防尘罩由移动气缸控制开合状态;系统设有总控系统,所述总控系统与激光传感器、纵向驱动机构、横向驱动机构、移动气缸通信,所述激光传感器外设有防尘罩。
3.一种基于权利要求1或2所述车辆定位和车厢尺寸的测量系统的测量方法,其特征在于,包括以下步骤:
4.根据权利要求3所述车辆定位和车厢尺寸的测量方法,其特征在于,所述步骤2包括以下步骤:
5.根据权利要求3所述车辆定位和车厢尺寸的测量方法,其特征在于,所述步骤3包括以下步骤:
6.根据权利要求3所述车辆定位和车厢尺寸的测量方法,其特征在于,所述步骤4包括以下步骤:
7.根据权利要求3所述车辆定位和车厢尺寸的测量方法,其特征在于,所述步骤5包括以下步骤:
8.根据权利要求3所述车辆定位和车厢尺寸的测量方法,其特征在于,所述步骤6包括以下步骤:
9.根据权利要求3所述车辆定位和车厢尺寸的测量方法,其特征在于,所述步骤7包括以下步骤:
技术总结
本发明揭示了一种车辆定位和车厢尺寸的测量系统,地基平台中间设有车辆通行和停放的通道,所述地基平台上方固定有整体框架,所述整体框架上设有两条沿通道方向设置轨道,两条所述轨道上设有沿轨道滑动的桁架,所述桁架上设有与通道垂直的滑轨,所述滑轨上安装有安装板,所述安装板的下表面设有采集车辆信息的激光传感器,所述桁架上设有驱动桁架沿轨道运动的纵向驱动机构,所述安装板上设有驱动安装板沿滑轨运动的横向驱动结构。本发明的优点在于:1、计算量小,处理的效率很高;2、对车辆本身规格以及停放的位置要求比较低,不要求车辆停的很直;3、可获取车辆位置和车厢内的尺寸;4、计算精度很高,可以获取车厢前后宽度差异,和车厢长度方向差异。
技术研发人员:吴锋,张聪
受保护的技术使用者:安徽工程大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!