道路表面病害高精度定位方法及系统与流程
本发明属于道路工程检测,更具体地,涉及一种城市道路运维过程中对其表面病害的精确定位方法及系统。
背景技术:
1、城市道路在使用中,面临来自交通负荷、运营环境等复杂条件的作用,存在裂纹、坑槽等很多表面病害。道路的存量巨大,道路表面病害主要通过人工定期巡检或者市民举报获得,缺乏高精度实时监测手段,道路表面病害位置经常获取不准确、不及时,这对道路维修养护管理工作效率影响较大,安全隐患大。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提出了一种道路表面病害高精度定位方法及系统,通过摄像机视觉技术、北斗导航定位和道路三维信息数据集成融合,实现对城市道路表面病害的快速高精确定位。
2、为实现上述目的,按照本发明的一个方面,提供了一种道路表面病害高精度定位方法,包括:
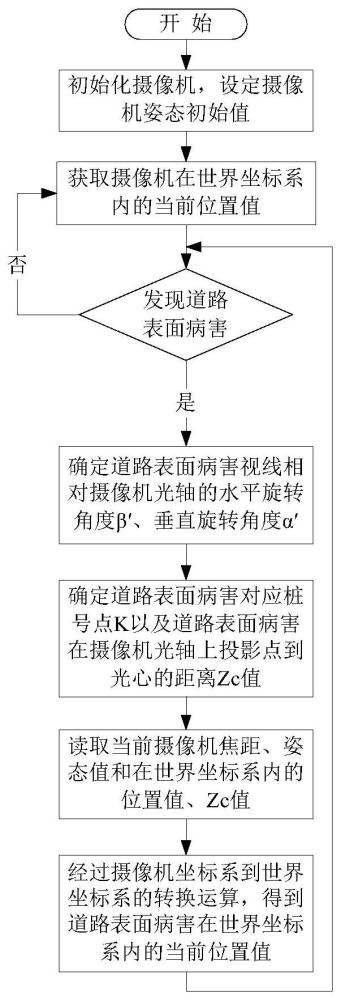
3、确定道路表面病害视线相对于摄像机光轴的水平旋转角度及垂直旋转角度;
4、根据摄像机所在道路三维信息数据、道路表面病害视线相对于摄像机光轴的水平旋转角度及垂直旋转角度,沿道路中心线运算确定道路表面病害对应桩号点以及道路表面病害在摄像机光轴上投影点到光心的距离值;
5、基于当前摄像机焦距、姿态值、在世界坐标系内的位置值及道路表面病害在摄像机光轴上投影点到光心的距离值,经过摄像机坐标系到世界坐标系的转换运算,得到道路表面病害在世界坐标系内的当前位置值。
6、在一些可选的实施方案中,所述沿道路中心线运算确定道路表面病害对应桩号点,包括:
7、基于当an≥0且an-1<0时,确定道路表面病害对应桩号点k位于knkn-1段内;
8、在knkn-1段内通过道路桩号二分递归运算获取k的位置;
9、其中,k1~kn表示从k0起向道路表面病害b1方向道路中心线上的道路坡度转折桩号点;k表示b1在道路中心线上相同桩号点;α表示道路表面内摄像机光轴与地面垂线夹角;α′表示道路表面内摄像机光轴与b1视线夹角;δkn表示kn点与k0点的距离,n表示道路表面病害b1方向道路中心线上的道路坡度转折桩号数量;hn表示kn点与摄像机s1的高度差;f表示摄像机s1的焦距;v表示道路表面病害b1在摄像机s1图像坐标系上的像素平面纵坐标;an表示中间变量代号;k0表示摄像机水平位置在道路中心线上相同桩号点。
10、在一些可选的实施方案中,由确定道路表面病害在摄像机光轴上投影点到光心的距离值zc,其中,β表示道路表面内摄像机光轴与kk0线夹角;β′表示道路表面内摄像机光轴与b1视线夹角;δk表示k点与k0点的距离;zc表示道路表面内b1在摄像机光轴上投影点到光心的距离;f表示摄像机s1的焦距;u表示道路表面病害b1在摄像机图像坐标系上的像素平面横坐标。
11、在一些可选的实施方案中,由得到道路表面病害b1在世界坐标中的位置,其中,zc表示俯视图中道路表面病害b1在摄像机光轴上投影点到光心的距离;u、v表示道路表面病害b1在摄像机图像坐标系上的像素平面坐标值;f表示摄像机s1的焦距;r表示摄像机坐标系到世界坐标系的旋转矩阵;t表示摄像机在世界坐标系的位置;x、y、z表示道路表面病害b1在世界坐标中的三维坐标值。
12、按照本发明的另一方面,提供了一种道路表面病害高精度定位系统,包括:
13、旋转角度确定模块,用于确定道路表面病害视线相对于摄像机光轴的水平旋转角度及垂直旋转角度;
14、第一定位模块,用于根据摄像机所在道路三维信息数据、道路表面病害视线相对于摄像机光轴的水平旋转角度及垂直旋转角度,沿道路中心线运算确定道路表面病害对应桩号点以及道路表面病害在摄像机光轴上投影点到光心的距离值;
15、第二定位模块,用于基于当前摄像机焦距、姿态值、在世界坐标系内的位置值及道路表面病害在摄像机光轴上投影点到光心的距离值,经过摄像机坐标系到世界坐标系的转换运算,得到道路表面病害在世界坐标系内的当前位置值。
16、在一些可选的实施方案中,上述第一定位模块,用于基于当an≥0且an-1<0时,确定道路表面病害对应桩号点k位于knkn-1段内;在knkn-1段内通过道路桩号二分递归运算获取k的位置;其中,k1~kn表示从k0起向道路表面病害b1方向道路中心线上的道路坡度转折桩号点;k表示b1在道路中心线上相同桩号点;α表示道路表面内摄像机光轴与地面垂线夹角;α′表示道路表面内摄像机光轴与b1视线夹角;δkn表示kn点与k0点的距离,n表示道路表面病害b1方向道路中心线上的道路坡度转折桩号数量;hn表示kn点与摄像机s1的高度差;f表示摄像机s1的焦距;v表示道路表面病害b1在摄像机s1图像坐标系上的像素平面纵坐标;an表示中间变量代号;k0表示摄像机水平位置在道路中心线上相同桩号点。
17、在一些可选的实施方案中,上述第一定位模块,还用于由确定道路表面病害在摄像机光轴上投影点到光心的距离值zc,其中,β表示道路表面内摄像机光轴与kk0线夹角;β′表示道路表面内摄像机光轴与b1视线夹角;δk表示k点与k0点的距离;zc表示道路表面内b1在摄像机光轴上投影点到光心的距离;f表示摄像机s1的焦距;u表示道路表面病害b1在摄像机图像坐标系上的像素平面横坐标。
18、在一些可选的实施方案中,上述第二定位模块,用于由得到道路表面病害b1在世界坐标中的位置,其中,zc表示俯视图中道路表面病害b1在摄像机光轴上投影点到光心的距离;u、v表示道路表面病害b1在摄像机图像坐标系上的像素平面坐标值;f表示摄像机s1的焦距;r表示摄像机坐标系到世界坐标系的旋转矩阵;t表示摄像机在世界坐标系的位置;x、y、z表示道路表面病害b1在世界坐标中的三维坐标值。
19、按照本发明的另一方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述方法的步骤。
20、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
21、本发明通过摄像机视觉技术、北斗导航定位和道路三维信息数据集成融合,实现对城市道路表面病害的快速高精确定位。
技术特征:
1.一种道路表面病害高精度定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述沿道路中心线运算确定道路表面病害对应桩号点,包括:
3.根据权利要求2所述的方法,其特征在于,由确定道路表面病害在摄像机光轴上投影点到光心的距离值zc,其中,β表示道路表面内摄像机光轴与kk0线夹角;β′表示道路表面内摄像机光轴与b1视线夹角;δk表示k点与k0点的距离;zc表示道路表面内b1在摄像机光轴上投影点到光心的距离;f表示摄像机s1的焦距;u表示道路表面病害b1在摄像机图像坐标系上的像素平面横坐标。
4.根据权利要求3所述的方法,其特征在于,由得到道路表面病害b1在世界坐标中的位置,其中,zc表示俯视图中道路表面病害b1在摄像机光轴上投影点到光心的距离;u、v表示道路表面病害b1在摄像机图像坐标系上的像素平面坐标值;f表示摄像机s1的焦距;r表示摄像机坐标系到世界坐标系的旋转矩阵;t表示摄像机在世界坐标系的位置;x、y、z表示道路表面病害b1在世界坐标中的三维坐标值。
5.一种道路表面病害高精度定位系统,其特征在于,包括:
6.根据权利要求5所述的系统,其特征在于,所述第一定位模块,用于基于当an≥0且an-1<0时,确定道路表面病害对应桩号点k位于knkn-1段内;在knkn-1段内通过道路桩号二分递归运算获取k的位置;其中,k1~kn表示从k0起向道路表面病害b1方向道路中心线上的道路坡度转折桩号点;k表示b1在道路中心线上相同桩号点;α表示道路表面内摄像机光轴与地面垂线夹角;α′表示道路表面内摄像机光轴与b1视线夹角;δkn表示kn点与k0点的距离,n表示道路表面病害b1方向道路中心线上的道路坡度转折桩号数量;hn表示kn点与摄像机s1的高度差;f表示摄像机s1的焦距;v表示道路表面病害b1在摄像机s1图像坐标系上的像素平面纵坐标;an表示中间变量代号;k0表示摄像机水平位置在道路中心线上相同桩号点。
7.根据权利要求6所述的系统,其特征在于,所述第一定位模块,还用于由确定道路表面病害在摄像机光轴上投影点到光心的距离值zc,其中,β表示道路表面内摄像机光轴与kk0线夹角;β′表示道路表面内摄像机光轴与b1视线夹角;δk表示k点与k0点的距离;zc表示道路表面内b1在摄像机光轴上投影点到光心的距离;f表示摄像机s1的焦距;u表示道路表面病害b1在摄像机图像坐标系上的像素平面横坐标。
8.根据权利要求7所述的系统,其特征在于,所述第二定位模块,用于由得到道路表面病害b1在世界坐标中的位置,其中,zc表示俯视图中道路表面病害b1在摄像机光轴上投影点到光心的距离;u、v表示道路表面病害b1在摄像机图像坐标系上的像素平面坐标值;f表示摄像机s1的焦距;r表示摄像机坐标系到世界坐标系的旋转矩阵;t表示摄像机在世界坐标系的位置;x、y、z表示道路表面病害b1在世界坐标中的三维坐标值。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至4任一项所述方法的步骤。
技术总结
本发明公开了一种道路表面病害高精度定位方法及系统,属于道路工程检测技术领域,方法包括:确定道路表面病害视线相对于摄像机光轴的水平旋转角度及垂直旋转角度;根据摄像机所在道路三维信息数据、道路表面病害视线相对于摄像机光轴的水平旋转角度及垂直旋转角度,沿道路中心线运算确定道路表面病害对应桩号点以及道路表面病害在摄像机光轴上投影点到光心的距离值;基于当前摄像机焦距、姿态值、在世界坐标系内的位置值及道路表面病害在摄像机光轴上投影点到光心的距离值,经过摄像机坐标系到世界坐标系的转换运算,得到道路表面病害在世界坐标系内的当前位置值。通过本发明可以实现对城市道路表面病害的快速高精确定位。
技术研发人员:常杰锋,张楠,孙晓菲,张号军,李瑞华,陈飞
受保护的技术使用者:中冶南方城市建设工程技术有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!