一种面向飞行器的北斗正交基线测向的角度优化方法
本发明属于卫星导航定位,尤其是涉及一种面向飞行器的北斗正交基线测向的角度优化方法。
背景技术:
1、相比于传统的惯性导航,利用全球导航卫星系统(gnss)信号解算载体姿态,具有高精度、低成本、无漂移等显著优点,因而得到了广泛的应用。经典的面向飞行器的gnss姿态解算方法通常采用三个天线,分别安装在机身、机头和机翼,机身和机头位置的两个天线构成一条基线,机身和机翼位置的两个天线构成另一条基线,然后采用整周模糊度解算技术,分别求得两条基线的基线坐标,进而根据载体坐标系和地理坐标系的转换关系,求得姿态角。
2、然而,上述方法求解两条基线的基线坐标过程中,存在两个问题:(1)由于原始的载波相位观测值存在粗差和野值,导致各自独立求解的基线分量误差存在粗差,进而估计的姿态角前后历元存在小角度跳变,姿态角不够平滑,不利于飞行器控制系统进行处理;(2)两条基线之间呈正交的几何关系,没有充分此约束条件参与估计,算法不是最优估计。
3、因此,有必要设计一种面向飞行器的北斗正交基线测向的角度优化方法,将正交约束条件融入到基线估计的过程中,对抗原始观测值不理想所带来的小角度跳变问题,优化基线估计值和最终姿态角的精度。
技术实现思路
1、有鉴于此,本发明旨在克服现有技术中上述问题的不足之处,提出一种面向飞行器的北斗正交基线测向的角度优化方法,该方法利用天线的几何形状和基线长度,将三维gnss姿态确定问题重新表述为对非凸集的优化,提供了一个高度精确的三维gnss姿态确定方法。
2、为达到上述目的,本发明的技术方案是这样实现的:
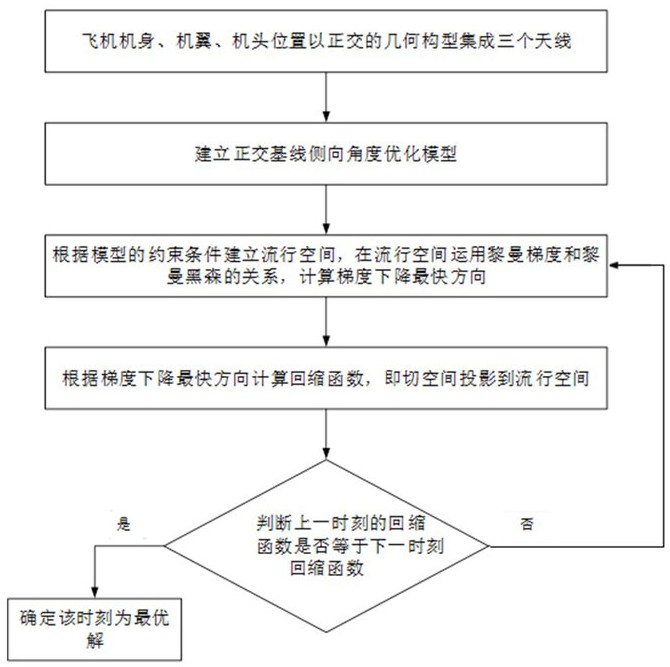
3、一种面向飞行器的北斗正交基线测向的角度优化方法,包括如下步骤:
4、步骤1:根据飞机机身、机翼、机头位置,以正交的几何构型集成三个天线,选取机身到机头的方向为基线矢量x方向,机身至机翼的方向为基线矢量y方向,x与y构成正交关系,以飞行器的姿态角为优化目标,建立正交基线测向角度优化模型,正交基线测向角度优化模型的目标函数为:
5、;
6、其中,a是在x方向进行m颗卫星载波相位差观测组成的m维向量的矩阵;b是在y方向进行m颗卫星载波相位差观测组成的m维向量的矩阵;a是在x方向上n个接收机受m颗卫星观测的视距与在x方向上最短基线距离的乘积,组成m×n的矩阵;b是在y方向上n个接收机受m颗卫星观测的视距与在y方向上最短基线距离的乘积,组成m×n的矩阵;
7、约束条件为:
8、,x与y正交,其夹角余弦值是0;
9、步骤2:根据正交基线测向角度优化模型的约束条件确定流行空间m;
10、步骤3:根据流行空间m的点(x,y)的切向量,确定与所述流行空间m的点(x,y)的切空间,以及切空间内的内积导数和方向导数;
11、步骤4:根据切空间内的内积导数确定欧式梯度与方向导数之间的关系和黎曼梯度与方向导数之间的关系,进而确定黎曼梯度与欧式梯度的关系,得出黎曼梯度的表达式;
12、步骤5:根据黎曼梯度确定黎曼梯度与黎曼黑森的关系,确定梯度下降最快方向;
13、步骤6:根据梯度下降最快方向确定回缩函数,判断回缩函数上一时刻得出的值是否等于下一时刻的值,确定正交基线测向角度优化模型的最优解时刻,从而确定最终的飞行器的姿态角。
14、进一步的,所述步骤6中,确定回缩函数包括:
15、将切空间投影到流行空间,寻找下一个预测点。
16、本发明还提供了一种面向飞行器的北斗正交基线测向的角度优化系统,包括:
17、模型构建模块,用于根据飞机机身、机翼、机头位置,以正交的几何构型集成三个天线,选取机身到机头的方向为基线矢量x方向,机身至机翼的方向为基线矢量y方向,x与y构成正交关系,以飞行器的姿态角为优化目标,建立正交基线测向角度优化模型,正交基线测向角度优化模型的目标函数为:
18、;
19、其中,a是在x方向进行m颗卫星载波相位差观测组成的m维向量的矩阵;b是在y方向进行m颗卫星载波相位差观测组成的m维向量的矩阵;a是在x方向上n个接收机受m颗卫星观测的视距与在x方向上最短基线距离的乘积,组成m×n的矩阵;b是在y方向上n个接收机受m颗卫星观测的视距与在y方向上最短基线距离的乘积,组成m×n的矩阵;
20、约束条件为:
21、,x与y正交,其夹角余弦值是0;
22、流行空间确定模块,用于根据正交基线测向角度优化模型的约束条件确定流行空间m;
23、切空间确定模块,用于根据流行空间m的点(x,y)的切向量,确定与所述流行空间m的点(x,y)的切空间,以及切空间内的内积导数和方向导数;
24、黎曼梯度确定模块,用于根据切空间内的内积导数确定欧式梯度与方向导数之间的关系和黎曼梯度与方向导数之间的关系,进而确定黎曼梯度与欧式梯度的关系,得出黎曼梯度的表达式;
25、梯度下降最快方向确定模块,用于根据黎曼梯度确定黎曼梯度与黎曼黑森的关系,确定梯度下降最快方向;
26、结果确定模块,用于根据梯度下降最快方向确定回缩函数,判断回缩函数上一时刻得出的值是否等于下一时刻的值,确定正交基线测向角度优化模型的最优解时刻,从而确定最终的飞行器的姿态角。
27、相对于现有技术,本发明所述的一种面向飞行器的北斗正交基线测向的角度优化方法,具有以下优势:
28、第一,通过引入黎曼优化方法,可以减小信号传播误差、大气条件和接收机误差等因素对基线估计的影响,提高估计精度和可靠性,并且黎曼优化方法具有普适性,可以适应不同的场景和问题,这种方法还可以与其他技术相结合,进一步提高估计性能;
29、第二,本发明的方法结合了黎曼几何和优化算法的优势,利用黎曼几何描述卫星轨道和信号传播的几何特征,并利用优化算法寻找基线的最佳估计值,能够提高基线估计的精度和可靠性;
30、第三,本发明的方法计算量较小,复杂度低,适用于单片机等低成本处理器。
技术特征:
1.一种面向飞行器的北斗正交基线测向的角度优化方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种面向飞行器的北斗正交基线测向的角度优化方法,其特征在于:所述步骤6中,确定回缩函数包括:
3.一种面向飞行器的北斗正交基线测向的角度优化系统,其特征在于:包括:
技术总结
本发明涉及一种面向飞行器的北斗正交基线测向的角度优化方法,包括:构建以正交基线侧向的角度优化模型为目标的角度优化问题;将模型中的约束条件构建流行空间,在流行空间中定义内积、方向导数;根据内积,建立黎曼梯度与欧式梯度的关系,进而得出黎曼梯度的表达式;根据黎曼梯度计算黎曼黑森,之后建立黎曼梯度与黎曼黑森的关系,求解方程,得到梯度下降最快方向;根据梯度下降最快方向,求出回缩函数;当回缩函数上一时刻得出的值等于下一时刻的值时迭代完成,便找到了最优点,得到最优的姿态角。本发明的方法计算量较小,复杂度低,可靠性好。
技术研发人员:陈万通,陈帅,赵童童,刘瑞华,孙淑光
受保护的技术使用者:中国民航大学
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!