一种基于激光编码定位的被动式可移动对象跟踪定位方法与流程
本发明涉及虚实融合和激光定位,更具体地,涉及一种基于激光编码定位的被动式可移动对象跟踪定位方法。
背景技术:
1、虚实融合技术致力于物理世界(实物)、虚拟世界(虚物)和用户(人)三者之间的无缝融合,以实现自然、逼真、和谐的人机交互。虚实融合技术在扩展了物理世界边界的同时也解决了虚拟世界中“虚实分离”的问题,在教育教学、技能培训、手术医疗、军事仿真和航天模拟等领域都具有广阔的应用前景。
2、为实现物理信息在虚拟环境的无缝融合,在构建虚实融合环境前需对信息提取空间的物理对象进行分类。根据物理对象运动特性、交互范式和存在状态,物理空间目标对象可分为主动式可移动对象(active movable objects,amo)、被动式可移动对象(passivemovable objects,pmo)和不可移动对象(immovable objects,imo),三种信息的优先级依次降低。
3、第一层级为以人、动物、机器人等为代表的主动式可移动对象。该类对象具有主观能动性,运动空间和活动轨迹由运动对象自身决定,具有运动自由度高、活动范围大以及存在状态不受控的特性;此外,该类对象个性化特征明显且个性化特征对交互具有重要影响。在虚实融合场景中,该类对象最典型的代表为用户自身,他们既是信息提取的对象,也是交互行为的发出者和执行者,具有最高的交互权重和信息呈现级别。除用户外,该层级对象还包括环境参与者、能自由活动的机器人、宠物等具有主动运动能力的物理对象,该类对象在物理空间中交互权重和存在状态不可控,因此,为提高虚实融合系统交互效能、减少环境碰撞,在进行信息提取时该类对象具有最高的信息提取优先级。
4、第二层级为以交互工具为代表的被动式可移动对象,如键盘、手机、杯子等具有特定功能但运动状态不定的对象。该类对象具有运动轨迹和活动范围可控的特征,在物理空间中的出现和消失状态稳定,虽具有个性化特征,但视觉纹理、颜色、几何形状等信息对交互影响不高,因此不需进行实时绘制,但需进行实时跟踪。
5、第三层级为以墙壁和桌子等为代表的不可移动对象,该类对象的空间位置一般固定不变,交互权重较低,不需进行精确表达,但为避免碰撞,需根据第三层级对象来界定使用者的可活动空间。
6、当前虚实融合系统中信息提取方法可分为基于视觉的信息提取和基于传感器的信息重建两种方法,其中基于视觉的信息提取方法通过图像分割技术提取目标信息,当目标物体与背景差异不明显时容易造成目标视觉信息丢失,影响虚实融合效果;基于传感器重建的方法通过在目标物体或目标空间中安装传感器获取目标信息,应用于多物体空间中时容易因物体遮挡丢失位姿信息,造成虚实融合场景失配。
7、现有的专利文件中公开了一种mr融合显示方法、融合系统及民机驾驶舱融合系统,方法包括:根据实体相机的预设目标参数构建与其相同的虚拟相机;实体相机和虚拟相机同步拍摄实体场景和虚拟场景;提取虚拟目标轮廓区域,根据虚拟目标轮廓区域提取实体相机拍摄的实体场景中的对应的实体区域图像;将提取的实体区域图像融入到虚拟场景中的虚拟目标轮廓区域,完成虚实融合;尽管该现有技术可以实现快速提取实体真实场景中指定对象的像素信息并与虚拟场景中的三维渲染图像进行融合显示,从而提升混合现实仿真的拟真度,但是该技术在面对多目标,以及多个被动式可移动对象时定位精度较低,而且在多物体空间中时容易因物体遮挡丢失位姿信息,造成虚实融合场景失配。
技术实现思路
1、本发明为克服上述现有技术在对多个被动式可移动对象进行信息提取时位姿估计精度低、易出错的缺陷,提供一种基于激光编码定位的被动式可移动对象跟踪定位方法,能够使得虚实融合输入系统与物理输入系统具有同等交互精确度,在提高虚实融合环境自由度的同时优化了用户体验,有利于构建高性能、大范围的虚实融合系统。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种基于激光编码定位的被动式可移动对象跟踪定位方法,包括以下步骤:
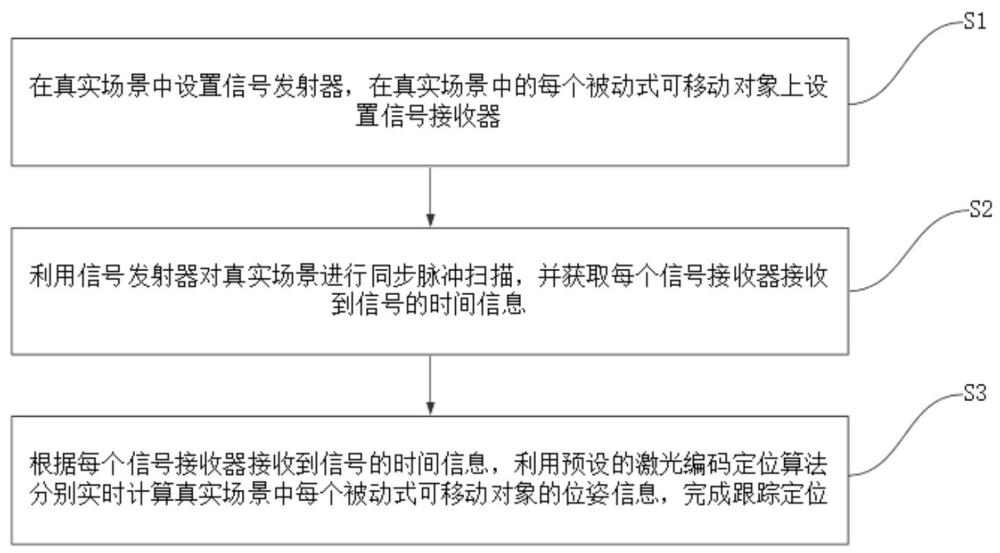
4、s1:在真实场景中设置信号发射器,在真实场景中的每个被动式可移动对象上设置信号接收器;
5、s2:利用信号发射器对真实场景进行同步脉冲扫描,并获取每个信号接收器接收到信号的时间信息;
6、s3:根据每个信号接收器接收到信号的时间信息,利用预设的激光编码定位算法分别实时计算真实场景中每个被动式可移动对象的位姿信息,完成跟踪定位。
7、优选地,所述步骤s1中,信号发射器包括:同步闪烁器和双轴旋转激光器,所述同步闪烁器用于发射同步脉冲;双轴旋转激光器包括分别垂直旋转和水平旋转的第一和第二激光发射器;
8、每个所述信号接收器均为激光接收器,每个激光接收器均包括至少3个不共线的光电传感器。
9、优选地,所述同步闪烁器具体为红外信标,所述第一和第二激光发射器均为红外激光发射器,每个所述激光接收器均为红外激光接收器。
10、优选地,所述步骤s2包括:
11、s2.1:在所述真实场景中,同步闪烁器实时向外发射同步脉冲;每个所述激光接收器接收同步脉冲,并获取第一脉冲时间t1;
12、s2.2:所述第一激光发射器垂直旋转,利用垂直激光扫描真实场景的水平方向,扫描角度为180°;当垂直激光扫描到被动式可移动对象时,其对应的激光接收器接收到垂直激光信号并获取垂直激光到达该激光接收器的时间t2;
13、s2.3:每个所述激光接收器再次接收同步脉冲,并获取第二脉冲时间t3;
14、s2.4:所述第二激光发射器水平旋转,利用水平激光扫描真实场景的垂直方向,扫描角度为180°;当水平激光扫描到被动式可移动对象时,其对应的激光接收器接收到水平激光信号并获取水平激光到达该激光接收器的时间t4;
15、s2.5:设置扫描总时间t,以扫描总时间t为一个周期,重复若干次步骤s2.1~s2.4,将每个激光发射器的第一脉冲时间t1、垂直激光到达该激光接收器的时间t2、第二脉冲时间t3和水平激光到达该激光接收器的时间t4共同对应保存为每个信号接收器接收到信号的时间信息。
16、优选地,所述第一激光发射器垂直旋转的方向为逆时针,第二激光发射器水平旋转的方向为顺时针;
17、或第一激光发射器垂直旋转的方向为顺时针,第二激光发射器水平旋转的方向为逆时针。
18、优选地,所述步骤s3包括:
19、s3.1:建立球坐标系,对于每个信号接收器,任选其中3个不共线的光电传感器,根据每个信号接收器接收到信号的时间信息,计算每个信号接收器中所选3个光电传感器的方位角和仰角;
20、s3.2:利用预设的激光编码定位算法构造定位方程,利用牛顿迭代法迭代求解所述定位方程,获取每个信号接收器中所选3个光电传感器与球坐标系原点之间的距离;
21、s3.3:将每个信号接收器中所选3个光电传感器的方位角、仰角和与球坐标系原点之间的距离,共同作为真实场景中每个被动式可移动对象的位姿信息,完成跟踪定位。
22、优选地,所述步骤s3.1包括:
23、建立球坐标系,对于每个信号接收器,任选其中3个不共线的光电传感器,并分别记为光电传感器a、b和c;
24、在所建立的球坐标系中,光电传感器a、b和c的位姿信息分别表示为:、和,其中,、和分别为球坐标系原点到光电传感器a、b和c之间的距离,、和分别为光电传感器a、b和c的方位角,、和分别为光电传感器a、b和c的方位角;所述球坐标系原点到光电传感器a、b和c的向量分别表示为:、和;
25、计算方位角的过程为:
26、
27、计算仰角的过程为:
28、
29、其中,t 为扫描总时间。
30、优选地,所述步骤s3.2包括:
31、构造矩阵方程:
32、
33、
34、
35、
36、其中,,、和分别为向量和、和,以及和之间的夹角; ab、 bc和 ac分别为预先测量得到的光电传感器a和b,b和c,以及a和c之间的距离;
37、所述矩阵方程满足如下条件:在处有精确解,使得;将所述矩阵方程转化为定位方程,所述定位方程具体为:
38、
39、其中:
40、
41、为的雅克比矩阵;
42、利用牛顿迭代法迭代求解所述定位方程,获取每个信号接收器中所选3个光电传感器与球坐标系原点之间的距离。
43、优选地,所述步骤s3.3中,真实场景中被动式可移动对象的位姿信息表示为:
44、
45、其中,、和分别为k次迭代后获取到的球坐标系原点到光电传感器a、b和c之间的距离。
46、优选地,所述方法还包括:
47、s4:在虚拟环境中对每个被动式可移动对象进行三维建模,获取每个被动式可移动对象对应的三维模型;并将每个被动式可移动对象的位姿信息与其对应的三维模型相融合,完成在虚拟环境中对被动式可移动对象的跟踪定位。
48、与现有技术相比,本发明技术方案的有益效果是:
49、本发明提供一种基于激光编码定位的被动式可移动对象跟踪定位方法,在真实场景中设置信号发射器,在真实场景中的每个被动式可移动对象上设置信号接收器;利用信号发射器对真实场景进行同步脉冲扫描,并获取每个信号接收器接收到信号的时间信息;根据每个信号接收器接收到信号的时间信息,利用预设的激光编码定位算法分别实时计算真实场景中每个被动式可移动对象的位姿信息,完成跟踪定位;
50、本发明基于脉冲激光编码定位来提取多个被动式可移动对象的位姿信息,定位精度高;同时,获得的位姿信息还可用于与三维模型进行视觉信息集成,能够使得虚实融合输入系统与物理输入系统具有同等交互精确度,在提高虚实融合环境自由度的同时优化了用户体验;其次,本发明支持多发射器同时工作,避免了无独立编码情况下发射器之间的互相干扰,扩展了发射器的使用数量,增加了跟踪范围;此外,激光接收器标识点具有独立数据处理能力,能按照需求自定义数量和外形,可以便捷地与头盔显示器、键盘、桌椅等设备进行集成,有利于构建高性能、大范围的虚实融合系统。
- 还没有人留言评论。精彩留言会获得点赞!