一种基于时空欠采样的雷达成像方法、装置和介质
本发明涉及雷达,尤其是涉及一种基于时空欠采样的雷达成像方法、装置和介质。
背景技术:
1、雷达是近场感知的主要媒介,与光学图像相比,毫米波雷达通常需要较大的天线孔径才能获得高分辨率的成像结果,所以常采用合成孔径雷达(synthetic apertureradar,sar)技术,它利用雷达与目标的相对运动把尺寸较小的真实天线孔径用数据处理的方法合成为一较大的等效天线孔径的雷达。
2、在诸多成像算法中,基于匹配滤波器的距离徙动算法(range migrationalgorithm,rma)由于其基于快速傅里叶变换(fast fourier transform,fft)的硬件架构而展现出极强的可实现性,这一特点使其成为当下主流的成像算法选择。可由于nyquist采样准则的限制,获得一张高分辨率的图像往往需要大规模、等间隔、密集采样,从而引入大量冗余数据,造成资源浪费,因此就如何减少距离徙动算法在成像时所需要的数据量并对该算法所需的资源进行优化在实际应用中具有重要意义。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在所需数据量大、优化问题复杂的缺陷而提供一种基于时空欠采样的雷达成像方法、装置和介质。
2、本发明的目的可以通过以下技术方案来实现:
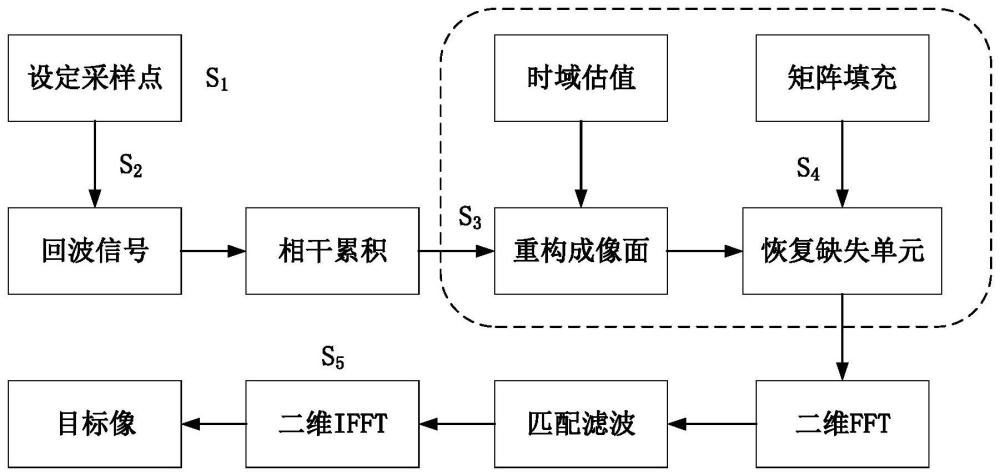
3、一种基于时空欠采样的雷达成像方法,包括以下步骤:
4、s1:依照实际设备处理能力,设定空间稀疏阵列与每个观测位置上雷达采样点数;
5、s2:启动扫描装置,控制雷达在每个设定的观测位置上完成数据采集,得到回波信号;
6、s3:对回波信号进行相干累积,通过统计估值方法,根据回波信号包含的采样点构造时域欠采样下的雷达成像面,并记录中心采样位置的距离信息;
7、s4:通过变分贝叶斯低秩矩阵填充算法,对雷达成像面中因空间欠采样而丢失的数据进行恢复,得到数据恢复后的成像面;
8、s5:对数据恢复后的成像面,根据距离信息构建匹配滤波因子,通过距离徙动算法架构完成成像。
9、进一步地,步骤s3具体包括:
10、s31:对回波信号进行相干累积,得到累计结果;
11、s32:根据累计结果,估计正弦信号的参数;
12、s33:根据正弦信号的参数,重构峰值频谱,得到二维矩阵;
13、进一步地,步骤s31具体为:将回波信号记录为矩阵g,矩阵g的维度为(l×c×n),其中l为扫描面上水平维度观测点数,c为扫描面上竖直维度观测点数,n为每个观测位置的采样点数,相干累计的计算表达式为:
14、∑ij|fft[g(i,j,:)]|
15、式中,fft代表快速傅里叶变换,i为横坐标,j为纵坐标,g(i,j,:)代表对相同横、纵坐标的不同幅度谱进行累加。
16、进一步地,步骤s32具体为:假设信号中有m个正弦信号,信号总长度为n,记为:
17、
18、式中,n=0,1,2,……,n-1,tm>0表示振幅,0<fm<0.5表示归一化频率,表示信号的初相,w(n)为零均高斯白噪声,其统计学特性满足:w(n)~n(0,σ2),令:t=(t1,t2,……,tm)t,f=(f1,f2,……,fm)t,变量根据中心极限定理,得到概率密度函数:
19、
20、基于最大似然准则,求解使概率密度函数值最大的θ的组合即为信号参数的估计,此时等效转换为求解f(θ)的最小值:
21、
22、通过余弦展开得:
23、
24、式中,进一步令:
25、cm=(1,cos2πfm,……,cos2πfm(n-1))t
26、sm=(1,sin2πfm,……,sin2πfm(n-1))t
27、h(f)=(c1,s1,c2,s2,……,cm,sm)
28、α=(α11,α21,α12,α22,……,α1m,α2m)t
29、替换二次型函数中的项,将其表示为矩阵形式:
30、f′(α,f)=[x-h(f)α]t[x-h(f)α]
31、对上式中的α求偏导,计算使导数为0的点即极点,该极点为极小值点:
32、
33、此时,得到:
34、
35、为使取到最小值,求使函数j(f)最大的组合f:
36、j(f)=xth(f)[ht(f)h(f)]-1ht(f)x
37、先通过快速傅里叶变换对频率范围进行粗估计,再对相邻两个频率范围进行遍历搜索,找到组合f,求解出频率估计振幅估计和初相估计
38、进一步地,步骤s33具体为:根据设备采样频率fs,将估计频率转化为实际频率fe,计算表达式为:
39、
40、保留其中中心区域部分的位置,并计算距离r,最后,根据傅里叶变换理论中时域与频域之间的关系,构造信号的峰值频谱:
41、
42、式中,为的估计值,为的估计值,得到大小为(l×c)的残缺二维矩阵sr-。
43、进一步地,步骤s4具体包括以下步骤:
44、s41:设置收敛条件和最大迭代次数;
45、s42:对矩阵sr-进行奇异值分解和矩阵融合,表达式为:
46、sr-=usvt=us1/2s1/2vt=abt
47、式中,usvt为奇异值分解结果,a为第一融合矩阵,b为第二融合矩阵;
48、s43:交替迭代更新第一融合矩阵a和第二融合矩阵b;
49、s44:直至收敛或达到最大迭代次数,通过更新后的第一融合矩阵a和第二融合矩阵b,得到矩阵sr-的恢复矩阵sr+。
50、进一步地,步骤s43包括以下步骤:
51、交替迭代更新第一融合矩阵a和第二融合矩阵b,根据稀疏贝叶斯学习原理,得到第一融合矩阵a和第二融合矩阵b的后验概率密度,表达式为:
52、
53、
54、式中,q(ai·)为第一融合矩阵a的后验概率密度,q(bj·)为第二融合矩阵b的后验概率密度,表示高斯分布,每次迭代中第一融合矩阵a和第二融合矩阵b的的均值和方差表达式为:
55、
56、
57、
58、
59、式中,<·>表示内积,β表示噪声系数,λ为超参数,ai·和bj·分别表示第一融合矩阵a的每一行以及第二融合矩阵b的每一列,aj和bi分别表示观测到的有效数据对应的列和行。
60、进一步地,步骤s5包括:
61、s51:构造匹配滤波因子:exp(-jkzr),其中kz表示距离为波矢分量;
62、s52:基于匹配滤波因子,借由距离徙动算法架构成像,计算表达式为:
63、σ=2dift[2dft(sr+)·exp(-jkzr)]
64、式中,σ为成像结果。
65、本发明的第二方面,一种基于时空欠采样的雷达成像装置,包括存储器、处理器,以及存储于存储器中的程序,处理器执行程序时实现如上任一的一种基于时空欠采样的雷达成像方法。
66、本发明的第三方面,一种存储介质,其上存储有程序,程序被执行时实现如上任一的一种基于时空欠采样的雷达成像方法。
67、与现有技术相比,本发明具有以下有益效果:
68、1.本发明采用空间稀疏采样获取数据,通过对回波信号进行相干累积,根据回波信号包含的采样点构造时域欠采样下的雷达成像面,再通过变分贝叶斯低秩矩阵填充算法,恢复成像面中空间欠采样丢失的数据,构建匹配滤波因子,通过距离徙动算法架构完成成像,规避了徙动算法的复杂的优化问题,在高信噪比的环境下具有较高的精度,减少成像所需的数据量。
69、2.本发明使用矩阵填充算法通过观测元素与未观测元素之间的关系来估计缺失数据,如果矩阵满足低秩约束,那么可以精确地通过观测元素对未观测元素进行恢复,相比观测矩阵对压缩感知算法性能的影响,矩阵填充算法的性能与观测矩阵无关。
70、3.本发明考虑了减少在扫描平面上的观测点(即构造空间稀疏的观测面),接着通过不同的稀疏反演的方法进行恢复,以此降低成像所需的数据量,还通过降低雷达在每个观测位置上的采样点数,大大减少了成像需求,且不影响成像质量。
71、4.本发明保留了距离徙动算法的优秀的硬件架构,规避了复杂的优化问题,具有很高的成像效率和可实现性,成像速度快。
- 还没有人留言评论。精彩留言会获得点赞!