一种阀门的性能分析方法、装置、设备及存储介质与流程
本技术涉及阀门检测领域,尤其涉及一种阀门的性能分析方法、装置、设备及存储介质。
背景技术:
1、阀门作为控制流体流动的关键组件,在众多工业领域中扮演着至关重要的角色。无论是在石油化工、制药、能源发电还是水处理等行业,阀门的性能直接影响到整个系统的安全、效率和运行成本。随着工业自动化程度的不断提高,对阀门的性能要求也越来越高,这不仅包括阀门的基本开关功能,还涉及到其精确控制流量的能力、响应速度、耐久性和维护的便捷性等方面。因此,开发一种全面评估阀门性能的方法,能够为阀门的设计、选型、维护和故障诊断提供重要支持,是当前阀门技术研究领域的重要需求。
2、尽管现有技术已经能够提供一定程度上的阀门性能评估,但仍存在一些不足之处。许多现有的评估方法主要关注阀门的某一或几个性能参数,如开关性能、密封性或耐压性,而缺乏对阀门性能的全面评估。这种片面的评估方法可能无法准确反映阀门在实际工作条件下的综合性能。其次,现有方法在数据采集和分析过程中往往需要较多的人工干预,这不仅增加了评估过程的复杂度和成本,也可能因为操作不当而影响评估结果的准确性。此外,对于先导阀门和非先导阀门的性能分析往往采用不同的方法,这给用户在进行阀门选择和比较时带来了不便。
技术实现思路
1、本技术提供了一种阀门的性能分析方法、装置、设备及存储介质,用于用于提高阀门性能检测的效率及准确率。
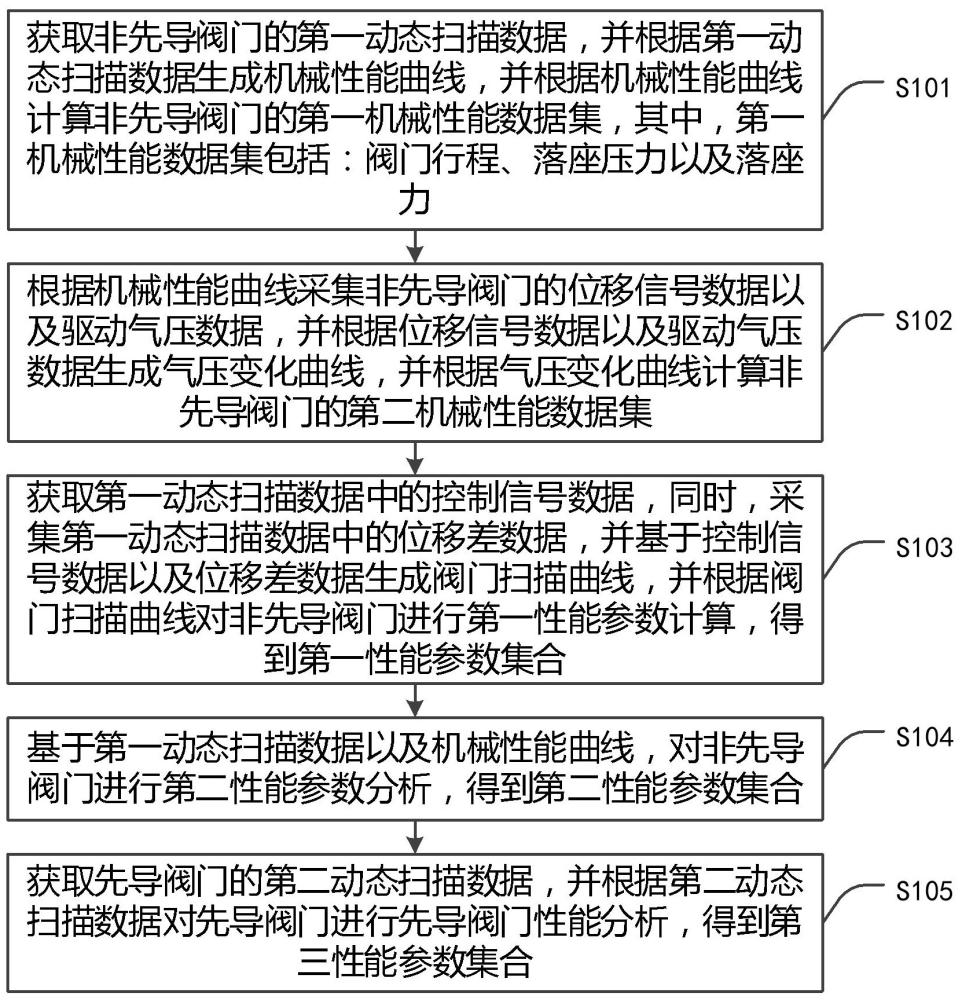
2、第一方面,本技术提供了一种阀门的性能分析方法,所述阀门的性能分析方法包括:获取非先导阀门的第一动态扫描数据,并根据所述第一动态扫描数据生成机械性能曲线,并根据所述机械性能曲线计算所述非先导阀门的第一机械性能数据集,其中,所述第一机械性能数据集包括:阀门行程、落座压力以及落座力;
3、根据所述机械性能曲线采集所述非先导阀门的位移信号数据以及驱动气压数据,并根据所述位移信号数据以及所述驱动气压数据生成气压变化曲线,并根据所述气压变化曲线计算所述非先导阀门的第二机械性能数据集;
4、获取所述第一动态扫描数据中的控制信号数据,同时,采集所述第一动态扫描数据中的位移差数据,并基于所述控制信号数据以及所述位移差数据生成阀门扫描曲线,并根据所述阀门扫描曲线对所述非先导阀门进行第一性能参数计算,得到第一性能参数集合;
5、基于所述第一动态扫描数据以及所述机械性能曲线,对所述非先导阀门进行第二性能参数分析,得到第二性能参数集合;
6、获取先导阀门的第二动态扫描数据,并根据所述第二动态扫描数据对所述先导阀门进行先导阀门性能分析,得到第三性能参数集合。
7、结合第一方面,在本技术第一方面的第一种实现方式中,所述获取非先导阀门的第一动态扫描数据,并根据所述第一动态扫描数据生成机械性能曲线,并根据所述机械性能曲线计算所述非先导阀门的第一机械性能数据集,包括:
8、获取所述第一动态扫描数据,并根据所述第一动态扫描数据生成机械性能曲线,基于所述机械性能曲线,提取所述第一动态扫描数据中的开阀指令时间及关阀指令时间;
9、基于所述开阀指令时间,提取所述开阀指令时间对应的第一位移数据,同时,提取所述关阀指令时间对应的第二位移数据;
10、基于所述关阀指令时间,采集关阀指令结束时所述非先导阀门的第三位移数据;
11、对所述第一位移数据以及所述第二位移数据进行差值计算,得到第一位移差值;
12、对所述第一位移数据以及所述第三位移数据进行差值计算,得到第二位移差值;
13、对所述第一位移差值以及所述第二位移差值进行数值比较,得到数值比较结果,当所述数值比较结果为第一位移差值较大时,将所述第一位移差值作为阀门行程,当所述数值比较结果为第二位移差值较大时,将所述第二位移差值作为阀门行程;
14、通过所述机械性能曲线对所述非先导阀门进行落座力分析,得到落座压力以及落座力;
15、将所述落座压力、所述落座力以及所述阀门行程合并为所述第一机械性能数据集。
16、结合第一方面,在本技术第一方面的第二种实现方式中,所述通过所述机械性能曲线对所述非先导阀门进行落座力分析,得到落座压力以及落座力,包括:
17、对所述机械性能曲线进行测试类型分析,得到所述非先导阀门的当前测试类型;
18、当所述当前测试类型为气开类型时,基于所述机械性能曲线采集位移开始变化时的第一驱动气压,同时,采集位移变化结束时的第二驱动气压;
19、根据所述第一驱动气压以及所述第二驱动气压对所述非先导阀门进行落座压力计算,得到落座压力,同时,将所述落座压力乘预置的隔膜有效面积,得到所述落座力;
20、当所述测试类型为气关类型时,基于所述机械性能曲线采集开阀到位时的第三驱动气压,同时,采集开阀过程中的最大驱动气压并将所述最大驱动气压作为第四驱动气压;
21、根据所述第三驱动气压以及所述第四驱动气压对所述非先导阀门进行落座压力计算,得到落座压力,同时,将所述落座压力乘预置的隔膜有效面积,得到所述落座力。
22、结合第一方面,在本技术第一方面的第三种实现方式中,所述根据所述机械性能曲线采集所述非先导阀门的位移信号数据以及驱动气压数据,并根据所述位移信号数据以及所述驱动气压数据生成气压变化曲线,并根据所述气压变化曲线计算所述非先导阀门的第二机械性能数据集,包括:
23、根据所述机械性能曲线采集所述非先导阀门的位移信号数据以及驱动气压数据;
24、将所述位移信号数据作为横轴数据,将所述驱动气压数据作为纵轴数据,建立所述气压变化曲线;
25、基于预置的阀门开度范围对所述横轴数据进行数据采集区间标定,得到目标数据采集区间;
26、对所述目标数据采集区间进行数据采样点分析,得到多个数据采样点,分别对每个所述数据采样点进行数据采集,得到每个所述数据采样点的气压数据集,其中,每个所述数据采样点的气压数据集包括每个所述数据采样点的开阀驱动气压以及关阀驱动气压;
27、基于每个所述数据采样点的气压数据集计算每个所述数据采样点的平均气压数据,同时,基于每个所述数据采样点的平均气压数据,计算得到每个所述数据采样点的气压误差数据;
28、基于每个所述数据采样点的平均气压数据以及每个所述数据采样点的气压误差数据,得到每个所述数据采样点的摩擦力数据;
29、基于每个所述数据采样点的摩擦力数据对所述非先导阀门进行摩擦力分析,得到所述非先导阀门的最大摩擦力、阀杆最大摩擦力对应行程、阀杆平均摩擦力、最大摩擦力位置、最小摩擦力,同时,基于每个所述数据采样点的摩擦力数据对所述非先导阀门进行bs值分析,得到所述非先导阀门的最大bs值以及最小bs值;
30、基于阀门行程,对所述非先导阀门进行供气压力参数分析,得到供气压力参数集合;
31、将所述非先导阀门的最大摩擦力、阀杆最大摩擦力对应行程、阀杆平均摩擦力、最大摩擦力位置、最小摩擦力、最大bs值、最小bs值以及所述供气压力参数集合合并为所述非先导阀门的第二机械性能数据集。
32、结合第一方面,在本技术第一方面的第四种实现方式中,所述基于每个所述数据采样点的摩擦力数据对所述非先导阀门进行摩擦力分析,得到所述非先导阀门的最大摩擦力、阀杆最大摩擦力对应行程、阀杆平均摩擦力、最大摩擦力位置、最小摩擦力,同时,基于每个所述数据采样点的摩擦力数据对所述非先导阀门进行bs值分析,得到所述非先导阀门的最大bs值以及最小bs值,包括:
33、通过最小二乘法将每个所述数据采样点的摩擦力数据拟合为目标直线;
34、基于所述目标直线对所述非先导阀门进行bs值分析,得到所述非先导阀门的最大bs值以及最小bs值;
35、基于每个所述数据采样点的摩擦力数据对所述非先导阀门进行摩擦力分析,得到所述非先导阀门的最大摩擦力、阀杆最大摩擦力对应行程、阀杆平均摩擦力、最大摩擦力位置、最小摩擦力。
36、结合第一方面,在本技术第一方面的第五种实现方式中,所述基于阀门行程,对所述非先导阀门进行供气压力参数分析,得到供气压力参数集合,包括:
37、基于每个所述数据采样点的气压数据集计算中间参数,得到中间参数;
38、将所述中间参数乘所述隔膜有效面积,得到目标弹性系数;
39、基于所述目标弹性系数,对所述非先导阀门进行供气压力参数分析,得到供气压力参数集合,其中,所述供气压力参数集合包括:初始供气压力、最小供气压力、最大供气压力以及供气压力下降率。
40、结合第一方面,在本技术第一方面的第六种实现方式中,所述获取所述第一动态扫描数据中的控制信号数据,同时,采集所述第一动态扫描数据中的位移差数据,并基于所述控制信号数据以及所述位移差数据生成阀门扫描曲线,并根据所述阀门扫描曲线对所述非先导阀门进行第一性能参数计算,得到第一性能参数集合,包括:
41、获取所述第一动态扫描数据中的控制信号数据,同时,采集所述第一动态扫描数据中的位移差数据;
42、以所述控制信号数据为横轴,以所述位移差数据作为纵轴,构建所述阀门扫描曲线;
43、对所述阀门扫描曲线的第一坐标轴进行取值,得到第一控制信号以及第二控制信号,根据所述第一控制信号以及所述第二控制信号生成信号控制行程;
44、对所述阀门扫描曲线的第二坐标轴进行取值,得到第一位移差以及第二位移差,根据所述第一位移差以及所述第二位移差生成目标位移值;
45、根据所述信号控制行程以及所述目标位移值生成所述第一性能参数集。
46、第二方面,本技术提供了一种阀门的性能分析装置,所述阀门的性能分析装置包括:
47、获取模块,用于获取非先导阀门的第一动态扫描数据,并根据所述第一动态扫描数据生成机械性能曲线,并根据所述机械性能曲线计算所述非先导阀门的第一机械性能数据集,其中,所述第一机械性能数据集包括:阀门行程、落座压力以及落座力;
48、生成模块,用于根据所述机械性能曲线采集所述非先导阀门的位移信号数据以及驱动气压数据,并根据所述位移信号数据以及所述驱动气压数据生成气压变化曲线,并根据所述气压变化曲线计算所述非先导阀门的第二机械性能数据集;
49、采集模块,用于获取所述第一动态扫描数据中的控制信号数据,同时,采集所述第一动态扫描数据中的位移差数据,并基于所述控制信号数据以及所述位移差数据生成阀门扫描曲线,并根据所述阀门扫描曲线对所述非先导阀门进行第一性能参数计算,得到第一性能参数集合;
50、第一分析模块,用于基于所述第一动态扫描数据以及所述机械性能曲线,对所述非先导阀门进行第二性能参数分析,得到第二性能参数集合;
51、第二分析模块,用于获取先导阀门的第二动态扫描数据,并根据所述第二动态扫描数据对所述先导阀门进行先导阀门性能分析,得到第三性能参数集合。
52、本技术第三方面提供了一种阀门的性能分析设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述阀门的性能分析设备执行上述的阀门的性能分析方法。
53、本技术的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的阀门的性能分析方法。
54、本技术提供的技术方案中,本技术通过结合机械性能曲线、气压变化曲线、阀门扫描曲线等多种数据分析手段,实现了对非先导阀门和先导阀门性能的全面评估。这种全面的评估机制能够揭示阀门在不同工作状态下的性能表现,为用户提供更加全面和准确的性能数据,有助于更好地理解阀门的工作原理和性能特点。通过对第一动态扫描数据的深入分析,本技术能够准确计算出阀门行程、落座压力、落座力等关键机械性能参数。此外,还能通过气压变化曲线和摩擦力分析等得到阀门的摩擦特性和bs值等参数。这些精准的计算结果对于阀门的设计改进、性能优化和故障诊断具有重要意义。本技术利用自动化的数据采集和分析技术,减少了人工干预的需求,提高了测试的效率和准确性。自动化的测试流程不仅能够加快数据处理速度,还能减少由于人为因素导致的数据误差,保证测试结果的客观性和可靠性。无论是非先导阀门还是先导阀门,本技术都能够进行有效的性能分析,这使得它具有很高的适用性。通过对阀门性能的全面和精准评估,本技术能够为阀门的设计改进提供科学依据,帮助设计人员优化阀门结构,提高阀门的工作效率和使用寿命。同时,这种方法也为用户在阀门选型过程中提供了重要参考,有助于用户选择到性能更优、更符合工作需求的阀门产品。
- 还没有人留言评论。精彩留言会获得点赞!