一种基于惯性与大气组合的航空地平仪姿态估计方法与流程
本发明涉及测量测试,具体涉及一种基于惯性与大气组合的航空地平仪姿态估计方法。
背景技术:
1、水平姿态角包括俯仰角和横滚角,是保障飞行安全的重要信息。现代飞机除了装备高精度的主惯导系统外,还装备了航空地平仪作为水平姿态角的备份测量设备。一旦主导航系统失效,飞行员可以通过航空地平仪来获得飞机的俯仰角和横滚角,以保证飞机能够安全返航和着陆。航空地平仪通常采用低精度、低成本的mems惯性器件,相比于高精度陀螺,mems陀螺精度低,无法有效敏感地球自转角速率和地球表观运动角速率,因此不具备航向自对准、航向保持和纯惯性导航能力。由于mems陀螺仪零漂误差大,仅作为航空地平仪进行姿态测量时误差也会随时间快速累积,难以满足长时间测量精度的要求。另一方面,由于航空地平仪对自主性和可靠性要求极高,不能采用惯性/卫星组合导航的非自主方式。
2、文献“基于mems惯性器件的水平姿态解算方案设计,弹箭与制导学报,2013,vol33(5), p35-40”公开了一种基于非线性状态观测器的水平姿态解算方法。文献利用mems陀螺仪输出构造系统方程,利用匀速条件下的加速度计输出构造量测量,并通过双重模值判别机制自动判别量测信息的有效性,最终实现了水平姿态信息的自主测量。该方法在机动情况下利用陀螺角速率进行姿态更新,在匀速条件下利用加速度计输出比力进行校正,难以满足长时间大机动环境下的姿态测量精度要求。
3、大气数据系统(air data system, ads)是一种无源工作的导航系统,通过对大气压强的测量获得真空速、气压高度等信息,不受高度、地形、电磁干扰等因素的影响,飞行全程都可以使用,同样具备自主性、隐蔽性的特点。
4、因此,需要一种可将惯导与大气数据系统相结合的方法来解决长时间大机动环境下的姿态测量的问题。
技术实现思路
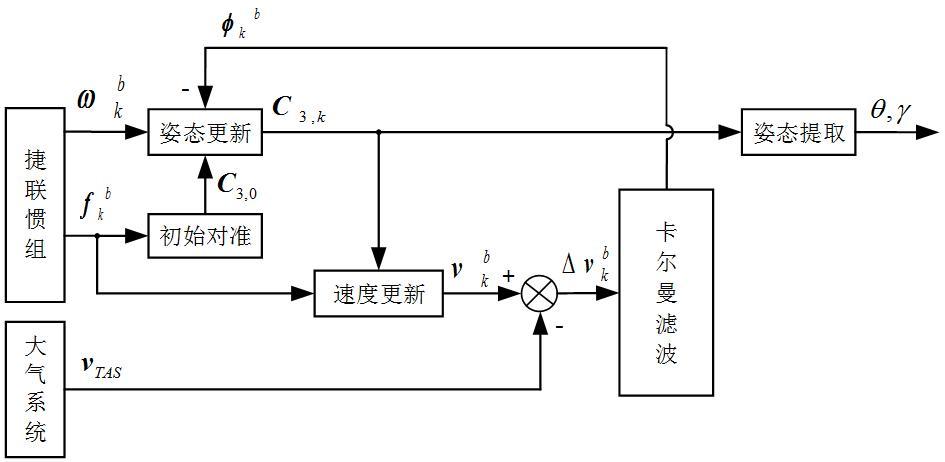
1、本发明是为了解决飞机长时间大机动环境下的姿态测量精度的问题,提供一种基于惯性与大气组合的航空地平仪姿态估计方法,利用加速度计输出比力进行姿态向量初始对准,利用陀螺输出角速率进行不依赖航向角的姿态向量更新,在此基础上完成载体系速度更新,然后利用大气真空速构造载体系速度量测进行卡尔曼滤波解算和反馈修正,最终输出修正后的俯仰角和横滚角信息。本发明通过惯性/大气组合估计姿态向量误差并进行修正,能够在飞机任意机动环境下正常工作,在保证自主性和可靠性的前提下,提高长时间大机动环境下的姿态角测量精度。
2、本发明提供一种基于惯性与大气组合的航空地平仪姿态估计方法,包括以下步骤:
3、s1、在飞机起飞前的静止状态,利用加速度计输出比力进行初始对准,建立姿态向量初值:
4、;
5、其中,为三维姿态向量的初值,三维姿态向量为地理坐标系至载体坐标系旋转矩阵的第3列,n为地理坐标系,b为载体坐标系,为俯仰角初值,为滚转角初值;
6、s2、利用陀螺输出角速率每周期进行简化姿态向量更新:
7、;
8、其中,和为前一周期和当前周期,三维姿态向量的递推初值取,为当前周期的姿态向量,矩阵根据陀螺输出角速率得到;
9、;
10、其中,为陀螺角增量,为3阶单位矩阵,为向量的模值,为向量的反对称阵;
11、s3、根据姿态向量和加速度计输出比力信息更新载体系速度:
12、;
13、其中,和分别为当前周期和前一周期的载体系速度,,为比力速度增量,为重力加速度,,为采样周期;
14、s4、根据大气数据系统输出的真空速信息构造载体系速度量测,通过卡尔曼滤波解算估计姿态向量误差并进行反馈修正;
15、s41、建立11维卡尔曼滤波器误差状态向量:
16、;
17、其中,为11维待求误差状态向量,、分别为和方向的姿态失准角,为三维载体系速度误差,为三维陀螺漂移,为三维加速度计零偏;
18、s42、根据卡尔曼滤波器误差状态向量建立卡尔曼滤波器系统状态方程并进行状态更新:
19、;
20、其中,为当前周期待求误差状态向量,为系统噪声,为从时刻至时刻的离散化状态转移矩阵;
21、s43、当大气数据系统输出的真空速有效时构造载体系速度量测值:
22、;
23、其中,为大气数据系统第周期输出的真空速;
24、s44、构造载体系速度量测方程并进行滤波更新:
25、;
26、其中,为大气真空速的量测噪声;
27、s45、根据卡尔曼滤波器系统状态方程、载体系速度量测值和载体系速度量测方程进行标准卡尔曼滤波器的状态更新和滤波更新,得到待求误差状态向量在周期的估计值;
28、s46、根据状态误差估计值对载体系速度和姿态向量进行反馈修正得到修正后速度信息和修正后姿态向量;
29、速度反馈修正的方法为:
30、;
31、为修正后速度信息,为状态误差估计值的第3~5个元素;
32、姿态向量反馈修正的方法为:
33、;
34、为修正后姿态向量,为失准角向量;
35、;
36、其中,为状态误差估计值的第*个元素;
37、s5、根据修正后姿态向量提取周期的俯仰角和滚转角并输出,一种基于惯性与大气组合的航空地平仪姿态估计方法完成。
38、本发明所述的一种基于惯性与大气组合的航空地平仪姿态估计方法,作为优选方式,步骤s1中,将维数为 3×3姿态矩阵的更新简化为三维姿态向量的更新以提高运算效率。
39、本发明所述的一种基于惯性与大气组合的航空地平仪姿态估计方法,作为优选方式,步骤s1中,和根据加速度计输出比力得到:
40、;
41、其中,为标准反正切函数,值域为(-π, π];、和分别为加速度计输出的轴、轴和轴比力信息。
42、本发明所述的一种基于惯性与大气组合的航空地平仪姿态估计方法,作为优选方式,步骤s2中,,为陀螺周期输出的角速率,为采样周期。
43、本发明所述的一种基于惯性与大气组合的航空地平仪姿态估计方法,作为优选方式,步骤s3中,,其中,为加速度计输出的比力信息。
44、本发明所述的一种基于惯性与大气组合的航空地平仪姿态估计方法,作为优选方式,步骤s42中,
45、;
46、其中,为矩阵的前2列元素。
47、本发明所述的一种基于惯性与大气组合的航空地平仪姿态估计方法,作为优选方式,步骤s46中,进行速度反馈修正可避免速度误差过大,影响姿态失准角的估计精度。
48、本发明所述的一种基于惯性与大气组合的航空地平仪姿态估计方法,作为优选方式,步骤s5中,
49、;
50、其中,为修正后姿态向量的第*个元素。
51、本发明提供一种无航向信息条件下的惯性与大气组合导航方法,在保证自主性和可靠性前提下,满足载体大机动飞行的姿态测量精度要求。
52、本发明具有以下优点:
53、本发明根据航空地平仪不需要提供航向角信息的特点,将维数为 3×3姿态矩阵的更新简化为3维姿态向量的更新,提高了运算效率;在缺少航向角信息的情况下,建立了载体系速度简化更新方法,与大气数据系统的真空速为同一坐标系,避免了坐标转换;在载体系下建立了不依赖航向角信息的惯性/大气组合卡尔曼滤波器,在保证自主性的前提下有效提高大机动条件下的姿态精度。
- 还没有人留言评论。精彩留言会获得点赞!