一种基于光学遥感方式的气体含量测量装置及方法
本发明涉及环境监测,尤其涉及一种基于光学遥感方式的气体含量测量装置及方法。
背景技术:
1、温室气体是指任何会吸收和释放红外线辐射并存在大气中的气体,温室气体一旦超出大气标准,便会造成温室效应,使全球气温上升,威胁人类生存,因此,控制温室气体排放已成为全人类面临的一个主要问题。大气中温室气体实时检测,对判别温室气体成因、发展规律起到关键作用。目前,对温室气体的检测根据光谱吸收原理测量,主要通过温室气体测量仪,例如gasboard-3000ghg温室气体(co2/ch4/n2o)排放分析仪,该仪器能够给出co2、co、ch4等气体含量,但是只能给出特定点上的温室气体含量。而对温室气体空间分布情况,目前还没有很好的解决方法。
2、微脉冲激光雷达可以对选定区域进行空间扫描,从而获得该区域的雷达信号回波图,即遥感图像,该遥感图像包括了气溶胶、水分子、co2、co、ch4等分子对回波信号的影响。但是单独使用微脉冲激光雷达不能得到温室气体含量空间分布信息。
3、因此,现有技术中尚缺乏对温室气体含量空间分布信息进行处理及分析的系统或有效的测量方法。因此亟待开发一种能够通过获得温室气体的空间分布特性的系统,从而可判别温室气体成因及发展规律。
技术实现思路
1、本发明为解决上述问题,提供一种基于光学遥感方式的气体含量测量装置及方法。
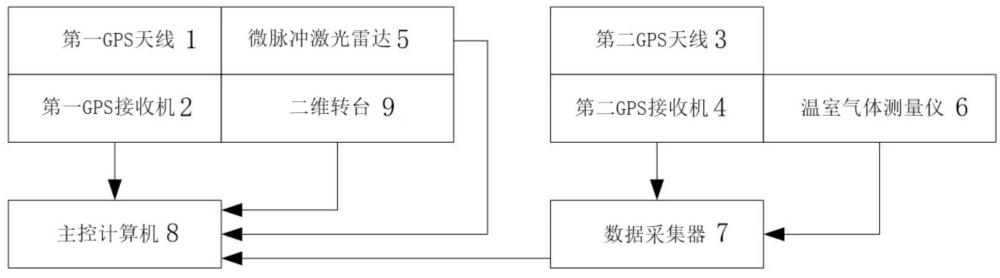
2、本发明第一目的在于提供一种基于光学遥感方式的气体含量测量装置,包括:第一gps天线、第一gps接收机、第二gps天线、第二gps接收机、微脉冲激光雷达、温室气体测量仪、转台装置、数据采集器、数据处理模块、控制模块;
3、所述微脉冲激光雷达设置在所述转台装置上,所述转台装置连接所述控制模块;所述转台装置带动所述微脉冲激光雷达进行空间扫描,所述微脉冲激光雷达对激光回波信号进行接收,数据处理模块基于激光回波信号得到遥感图像;
4、所述第一gps天线连接所述第一gps接收机,所述第一gps接收机用于采集微脉冲激光雷达所在的第一位置坐标;所述数据处理模块和所述第一gps接收机分别将遥感图像、第一位置坐标发送给所述控制模块,在所述控制模块上进行映射,得到遥感地图;
5、所述第二gps天线连接所述第二gps接收机,所述第二gps接收机用于采集所述温室气体测量仪的第二位置坐标;所述数据采集器连接所述第二gps接收机和所述温室气体测量仪,所述数据采集器用于将所述第二位置坐标、所述温室气体测量仪测定的温室气体含量信息发送给所述控制模块,在所述控制模块上将所述第二位置坐标在所述遥感地图上进行映射;
6、所述控制模块记录持续采集的遥感地图、温室气体含量信息,得到数据集;通过对所述数据集进行机器学习,再将机器学习结果应用到整个遥感地图,得到各个点位置处的温室气体含量。
7、优选的,控制模块包括主控计算机,用于控制所述转台装置的转动、以及接收数据并进行分析;所述机器学习为反向传播神经网络算法。
8、优选的,转台装置为二维转台,所述空间扫描是在水平方位和俯仰方向上扫描。
9、优选的,第一gps天线和第二gps天线选用贴片天线。
10、优选的,第一gps接收机和第二gps接收机选用测量型gps接收机。
11、优选的,微脉冲激光雷达选用气溶胶激光雷达。
12、优选的,温室气体包括co2、co和/或ch4。
13、本发明第二目的在于提供一种基于光学遥感方式的气体含量测量方法,采用温室气体含量测量装置测量,具体包括如下步骤:
14、s1、采用微脉冲激光雷达进行空间扫描并对激光回波信号进行接收,数据处理模块基于激光回波信号得到遥感图像;
15、s2、第一gps接收机采集微脉冲激光雷达所在的第一位置坐标;
16、s3、数据处理模块和第一gps接收机分别将遥感图像、第一位置坐标发送给控制模块,在控制模块的平面地图软件上进行映射,得到遥感地图;
17、s4、第二gps接收机采集得到温室气体测量仪的第二位置坐标;温室气体测量仪开机工作得到温室气体的含量;
18、s5、数据采集器收集第二位置坐标、温室气体含量信息并发送给控制模块,在控制模块上将第二位置坐标在遥感地图上进行映射;
19、s6、控制模块记录持续采集的遥感地图、温室气体含量信息,得到数据集;对数据集进行机器学习,建立遥感图像与温室气体含量的对应关系,输出机器学习结果;
20、s7、将机器学习结果应用到整个遥感地图,得到遥感地图上各个点位置处的温室气体含量;
21、s8、将机器学习结果应用到微脉冲激光雷达,激光雷达单独工作得到遥感地图,通过遥感地图得到不同位置处的温室气体含量。
22、优选的,步骤s6中以gps秒脉冲为同步基准。
23、优选的,机器学习具体包括:进行多层感知机模型训练,通过连续的加权求和以及非线性变换建立所述遥感地图的图像亮度值与所述温室气体的映射关系,输出训练模型;
24、所述多层感知机模型训练使用随机梯度下降算法;
25、所述数据集从输入层经过多个隐藏层的非线性变换,最后到达输出层,如下式所示:
26、;
27、式中,x表示输入,y表示输出层的值,表示输出层k的输入加权之和,表示当前神经元与下一层神经元的权重, xjk表示第j层神经元的输出值和第k层神经元的输入值,为激活函数。
28、与现有技术相比,本发明能够取得如下有益效果:
29、本发明基于光学遥感方式的温室气体含量测量装置及方法,是将激光雷达与温室气体测量仪组合使用,通过机器学习方法得到遥感图像上每个位置处的温室气体含量信息,从而获得温室气体空间分布特性,有助于判别温室气体成因及发展规律。
技术特征:
1.一种基于光学遥感方式的气体含量测量装置,其特征在于,包括:第一gps天线、第一gps接收机、第二gps天线、第二gps接收机、微脉冲激光雷达、温室气体测量仪、转台装置、数据采集器、数据处理模块、控制模块;
2.根据权利要求1所述的一种基于光学遥感方式的气体含量测量装置,其特征在于:所述控制模块包括主控计算机,用于控制所述转台装置的转动、以及接收数据并进行分析;所述机器学习方法为反向传播神经网络算法。
3.根据权利要求2所述的一种基于光学遥感方式的气体含量测量装置,其特征在于:所述转台装置为二维转台,所述空间扫描是在水平方位和俯仰方向上扫描。
4.根据权利要求3所述的一种基于光学遥感方式的气体含量测量装置,其特征在于:所述第一gps天线和第二gps天线选用贴片天线。
5.根据权利要求4所述的一种基于光学遥感方式的气体含量测量装置,其特征在于:所述第一gps接收机和第二gps接收机选用测量型gps接收机。
6.根据权利要求5所述的一种基于光学遥感方式的气体含量测量装置,其特征在于:所述微脉冲激光雷达选用气溶胶激光雷达。
7.根据权利要求6所述的一种基于光学遥感方式的气体含量测量装置,其特征在于:所述温室气体包括co2、co和/或ch4。
8.一种基于光学遥感方式的气体含量测量方法,其特征在于,采用权利要求1所述的一种基于光学遥感方式的气体含量测量装置测量,具体包括如下步骤:
9.根据权利要求8所述的一种基于光学遥感方式的气体含量测量方法,其特征在于:所述步骤s6中以gps秒脉冲为同步基准。
10.根据权利要求9所述的一种基于光学遥感方式的气体含量测量方法,其特征在于:所述机器学习,具体包括:进行多层感知机模型训练,通过连续的加权求和以及非线性变换建立所述遥感地图的图像亮度值与所述温室气体的映射关系,输出训练模型;
技术总结
本发明涉及环境监测技术领域,尤其涉及一种基于光学遥感方式的气体含量测量装置及方法。装置包括:转台装置带动所述微脉冲激光雷达进行空间扫描,得到遥感图像;第一GPS接收机用于采集微脉冲激光雷达所在的第一位置坐标;数据处理模块和第一GPS接收机分别将遥感图像、第一位置坐标发送给所述控制模块进行映射,得到遥感地图;第二GPS接收机用于采集温室气体测量仪的第二位置坐标;数据采集器连接第二GPS接收机和温室气体测量仪,将第二位置坐标、温室气体测量仪测定的温室气体含量信息发送给控制模块、进行映射;控制模块记录持续采集的信息得到数据集;通过机器学习,得到各位置处的温室气体含量。优点在于可以获得温室气体的空间分布。
技术研发人员:赵馨,吴小云,常帅
受保护的技术使用者:长春理工大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!