工业个人计算机装置及用于操作工业个人计算机装置的方法与流程
工业个人计算机装置及用于操作工业个人计算机装置的方法
[0001]
本发明涉及一种工业个人计算机(industrial personal computer,ipc)(工业pc(industrial pc)或ipc)装置。此外,本发明涉及一种用于操作ipc装置的方法。
[0002]
ipc装置通常用于工业环境中,以控制实体工厂装置(physical factory device,pfd)的操作。一些ipc装置能够分析来自实体工厂装置的传感器数据等,以便优化实体工厂装置的控制及操作。
[0003]
文献us 2017/0091791 a1公开一种包括发电系统的数字模型的数字电厂(digital power plant),所述数字模型包括实体电厂(physical powerplant)的数字模型。数字电厂包括用于基于关于实体电厂的操作的数据来重新配置数字模型的机器学习引擎。
[0004]
本发明的一个目的是提供一种改进的ipc装置。本发明的又一目的是提供一种改进的用于操作ipc装置的方法。
[0005]
根据第一方面,提供一种工业个人计算机(ipc)装置。所述ipc装置包括:
[0006]
实时操作系统(real time operating system,rtos);
[0007]
通用操作系统(general-purpose operating system,gpos);
[0008]
控制应用,在rtos内运行,用于产生控制数据且根据所产生的控制数据控制实体工厂装置的操作;
[0009]
数字孪生体(digital twin),在gpos内运行,用于提供实体工厂装置的数字拷贝,所述数字孪生体包括用于产生虚拟控制数据的虚拟控制应用及用于使用所述数字孪生体对实体工厂装置在其被利用虚拟控制数据控制时的操作进行仿真的仿真应用;
[0010]
实时人工智能(real-time artificial intelligence,ai-r)应用,与控制应用交互以执行第一人工智能(artificial intelligence,ai)算法,所述第一人工智能算法接收实体工厂装置数据及控制数据作为输入且提供第一修改数据作为输出,其中实体工厂装置数据包括指示实体工厂装置的操作的数据,且其中控制应用被配置成作为第一修改数据的功能来修改控制数据;以及
[0011]
通用人工智能(general-purpose artificial intelligence,ai-g)应用,与数字孪生体交互以执行第二人工智能算法,所述第二人工智能算法使用数字孪生体数据及虚拟控制数据作为输入且提供第二修改数据作为输出,其中数字孪生体数据包括指示使用数字孪生体对实体工厂装置进行的仿真的数据,且其中虚拟控制应用被配置成作为第二修改数据的功能来修改虚拟控制数据。
[0012]
ai-r应用可在包括实体工厂装置的真实系统中实行测试,而ai-g应用可在包括表示实体工厂装置的数字孪生体的虚拟系统中实行测试。具体来说,所述ipc装置执行两个并行的学习进程,从而改进(真实)实体工厂装置的控制及操作。
[0013]
所述ipc装置可为工业环境中使用的ipc。所述ipc装置可用于控制实体工厂装置。实体工厂装置可为机器和/或可为生产系统等的一部分。
[0014]
所述ipc装置可包括至少两个分离的操作系统,即rtos与gpos。rtos可为当数据进来时实时处理所述数据的实时应用提供服务。rtos可用于控制机械及工业系统,特别是实
体工厂装置。为控制实体工厂装置,rtos可包括控制应用。rtos可管理计算机的资源,以使得每次执行特定操作时,其执行时间量完全相同。
[0015]
gpos可用于处置操作员界面(operator interface)、数据库及通用计算任务。gpos的实例为苹果os x(apple os x)、linux及微软视窗(microsoft windows)。gpos可为不实时处理数据的应用提供服务。rtos及gpos可为ipc装置的不同虚拟机(virtual machine)的一部分。
[0016]
控制应用可产生用于控制实体工厂装置的操作的控制数据。例如,控制应用可被视为机器控制器。控制数据可提供关于特定进程的持续时间(duration)的指示、参数设定以及对实体工厂装置的操作有用的其他指示。控制应用可在rtos上运行。在一些实施例中,控制应用位于与rtos相同的虚拟机上。
[0017]
在操作期间,实体工厂装置可由指示实体工厂装置如何操作的实体工厂装置数据来描述。实体工厂装置数据可例如为从位于实体工厂装置附近或实体工厂装置上的传感器获得的传感器数据。
[0018]
数字孪生体可为实体工厂装置的虚拟数字表示。在一些实施例中,数字孪生体位于与gpos相同的虚拟机上。数字孪生体可在gpos上运行。数字孪生体可包括仿真应用及虚拟控制应用。虚拟控制应用可被视为控制应用在gpos环境中的映射(mapping)。具体来说,虚拟控制应用可产生用于控制(虚拟)数字孪生体的虚拟控制数据。仿真应用可使用数字孪生体对实体工厂装置的操作进行仿真。在此种仿真中,如果实体工厂装置被利用虚拟控制数据来控制,则数字孪生体可从虚拟控制应用接收虚拟控制数据且对实体工厂装置的操作进行仿真。使用孪生体装置对实体工厂装置进行的仿真可被视为实体工厂装置在虚拟环境中的虚拟映射。
[0019]
ai-r应用可执行第一人工智能(ai)算法,以例如在所述ipc装置内提供第一学习周期(first learning cycle)。即,ai-r应用可使用第一ai算法评价作为输入接收的数据(实体工厂装置数据及控制数据),以产生第一修改数据作为输出。第一修改数据可转而由控制应用用来修改控制数据,特别是更新和/或优化控制数据。如此,可修改、特别是更新和/或优化利用(经修改的)控制数据控制的实体控制装置的操作。ai-r应用可被视为与控制应用形成第一优化回路(first optimization loop)。
[0020]
与此第一学习周期并行,ai-g应用可在所述ipc装置内执行第二ai算法。ai-g应用可使用第二ai算法评价作为输入接收的数据(数字孪生体数据及虚拟控制数据),以产生第二修改数据作为输出。第二修改数据可转而由虚拟控制应用用来修改虚拟控制数据,特别是更新和/或优化虚拟控制数据。如此,可修改、特别是更新和/或优化利用数字孪生体仿真且利用(经修改的)虚拟控制数据控制的实体控制装置的(虚拟)操作。ai-g应用可被视为与虚拟控制应用形成第二优化回路(second optimization loop)。
[0021]
(第一及第二)ai算法可为例如神经网络等机器学习算法。(第一及第二)ai算法可为监督学习算法(supervised learning algorithm)或非监督学习算法(unsupervised learning algorithm)。ai算法也可为基于决策树(decision tree)、隐马尔可夫模型(hidden markov model)、最近邻方式(nearest neighbor approach)、分级方法(hierarchical method)、线性回归方法(linear regression method)等的算法。
[0022]
ai-r应用的学习周期可与真实实体工厂装置相关,而ai-g应用的学习周期可与真
实实体工厂装置的由数字孪生体实现的虚拟表示相关。与真实实体工厂装置相关的学习周期可使用rtos实时地实施,而与数字孪生体相关的学习周期可使用gpos非实时地实施。ai-r应用可在包括实体工厂装置的真实系统中实行测试,而ai-g应用可在包括表示实体工厂装置的数字孪生体的虚拟系统中实行测试。具体来说,所述ipc装置执行两个并行的学习进程以获得用于修改控制数据的修改数据。
[0023]
在一些实施例中,对实体工厂装置的控制可使用ai-g应用的学习周期与ai-r应用的学习周期二者来优化。在此种情形中,实体工厂装置的操作也可使用ai-g应用的学习周期与ai-r应用的学习周期二者来优化。因此,提供一种改进的ipc装置。
[0024]
对控制数据的优化具体指示修改控制数据,进而使得描述利用经修改的控制数据控制的实体工厂装置的操作的实体工厂装置数据更接近指示实体工厂装置的最优操作的预定最优数据。
[0025]
根据一个实施例,
[0026]
ai-g应用还被配置成将第二修改数据传输到ai-r应用;
[0027]
ai-r应用还被配置成向控制应用提供所接收的第二修改数据的至少部分和/或拒绝第二修改数据;并且
[0028]
控制应用被配置成作为第二修改数据的至少部分的功能来修改控制数据。
[0029]
ai-g应用及ai-r应用可实行串扰(crosstalk),所述串扰包括第二修改数据的传输和/或下文进一步描述的反馈数据的传输。第二修改数据可在“真实”系统中用于修改实体工厂装置的控制数据。因此,可针对第一修改数据和/或第二修改数据的至少部分来修改、特别是优化实体工厂系统的控制数据。因此,可进一步改进实体工厂装置的操作。此外,由于控制数据可作为第一修改数据和/或第二修改数据的功能进行修改,因此可增加所述ipc装置的灵活性。
[0030]
详细来说,接收第二修改数据的ai-r应用可决定是接受并部分或完全使用第二修改数据来修改控制数据,还是拒绝第二修改数据并完全不使用所述第二修改数据来修改控制数据。通过由ai-r应用对第二修改数据进行的验证,可改进所述ipc装置及实体工厂装置的安全性(safety)。
[0031]
根据又一实施例,ai-r应用还被配置成向ai-g应用发送反馈数据,所述反馈数据指示第二修改数据是否被部分用于修改控制数据、是否被完全用于修改控制数据和/或是否被拒绝。反馈数据可例如由ai-g应用用来修改第二ai算法。因此,可改进第二ai算法。
[0032]
根据又一实施例,仿真应用还被配置成使用数字孪生体对实体工厂装置在其被利用经修改的虚拟控制数据控制时的操作进行仿真,且ai-g应用还被配置成基于使用数字孪生体对实体工厂装置在其被利用经修改的虚拟控制数据控制时的操作进行的仿真的结果,判断第二修改数据是否应被传输到ai-r应用。
[0033]
在将第二修改数据传输到ai-r应用之前,ai-g应用可对实体工厂装置在其被利用用第二修改数据所修改的经修改的虚拟控制数据控制时的操作实行仿真。依据此仿真的结果,特别是如果仿真结果良好(good)和/或在特定范围内,则ai-g应用可决定向ai-r应用发送第二修改数据。作为另外一种选择,如果例如仿真结果不良(bad)和/或在特定范围之外,则ai-g应用可决定不向ai-r应用发送第二修改数据。在后一种情形中,可舍弃第二修改数据。
[0034]
此外,在一些实施例中,第一修改数据和/或第二修改数据可存储在存储单元中,而不管所述第一修改数据和/或第二修改数据是否用于修改控制数据。
[0035]
根据又一实施例,ai-g应用还被配置成基于反馈数据和/或基于第一修改数据来修改数字孪生体,以使得更佳地表示实体工厂装置。可修改数字孪生体,以使得使用数字孪生体及ai-g应用来改进学习进程。
[0036]
根据又一实施例,ai-r应用和/或ai-g应用设置在可插入到所述ipc装置中的扩展卡上,优选地设置在快速外围组件互连卡(pci express card)上。具体来说,扩展卡可以可移除的方式插入到所述ipc装置中。
[0037]
扩展卡可在所述ipc装置的ai层上提供ai-r应用及ai-g应用。扩展卡可作为扩展添加到所述ipc装置,特别是添加到现有的ipc装置,从而为所述ipc装置提供由ai-r应用及ai-g应用提供的双重学习功能性。
[0038]
根据又一实施例,所述ipc装置包括用于修改实体工厂装置的操作的两个分离的学习周期,所述学习周期中的一个学习周期使用ai-r应用与rtos交互地执行,以使得符合工业实时操作要求,且另一个学习周期独立于工业实时要求而使用ai-g应用与gpos交互地执行。
[0039]
根据又一实施例,实体工厂装置可通过暴露于以高风险因素为特征的高风险或通过暴露于以低于所述高风险因素的低风险因素为特征的低风险来操作,其中第一人工智能算法是提供第一修改数据的低风险人工智能算法,所述第一修改数据将通过作为所述第一修改数据的功能所修改的控制数据控制的实体工厂装置暴露于低风险,且其中第二人工智能算法是提供第二修改数据的高风险人工智能算法,所述第二修改数据将对通过作为所述第二修改数据的功能所修改的控制数据控制的实体工厂装置进行仿真的数字孪生体暴露于高风险。
[0040]
具体来说,所有理论上可能会将实体工厂装置暴露于高风险的对控制数据的修改是由数字孪生体在虚拟系统上测试。具体来说,实体工厂装置的高风险操作总是利用数字孪生体进行测试。只有当此测试指示使用此种有风险的控制数据的实体工厂装置的操作是安全的时,第二修改数据才会被生效并用于修改真实实体系统的控制数据。因此,可避免实体工厂装置的高风险操作,从而改进实体工厂装置的安全性(security)。
[0041]
根据又一实施例,控制应用被配置成:
[0042]
通过实行对控制数据的部分修改,根据第一修改数据和/或第二修改数据渐进地部分修改所述控制数据,在所述部分修改中,所述控制数据作为第一修改数据和/或第二修改数据的功能而仅被部分修改;
[0043]
判断利用经部分修改的控制数据控制的实体工厂装置的实体工厂装置数据是否位于容许范围内;
[0044]
如果确定出利用经部分修改的控制数据控制的实体工厂装置的实体工厂装置数据位于容许范围内,则重复进行部分修改控制数据的步骤及判断利用经部分修改的控制数据控制的实体工厂装置的实体工厂装置数据是否位于容许范围内的步骤,直到控制数据已被作为第一修改数据和/或第二修改数据的功能完全修改为止。
[0045]
详细来说,控制数据不会使用第一修改数据和/或第二修改数据来立即修改。相反,控制数据可被以逐步的方式慢慢修改。在每个步骤中,可使用第一修改数据和/或第二
修改数据来渐进地轻微修改(部分修改)控制数据。在对控制数据的此种轻微修改之后,通过判断描述实体工厂装置在由此经轻微修改的控制数据控制时的操作的实体工厂装置数据是否在容许范围内来验证此操作。只有当实体工厂装置数据在容许范围内时,仍然以小的步骤使用第一修改数据和/或第二修改数据进一步修改控制数据。
[0046]
详细来说,在每个步骤中,控制数据被部分修改成使得所述控制数据更接近对于每个步骤由第一修改数据和/或第二修改数据所规定的修改。在每个步骤之后,可重复实体工厂装置数据的部分修改及验证,直到控制数据已根据由第一修改数据和/或第二修改数据所规定的修改完全修改为止。
[0047]
如果在所述步骤中的一个步骤之后实体工厂装置数据在容许范围之外,则可停止使用第一修改数据和/或第二修改数据对控制数据进行的整个修改,且可基于第一修改数据和/或第二修改数据将控制数据重置到所述控制数据在所述修改之前的值。因此,可防止由实体工厂装置数据落在容许范围之外所指示的实体工厂装置的不正确操作。
[0048]
根据又一实施例,控制应用被配置成如果所述控制应用确定出利用经部分修改的控制数据控制的实体工厂装置的实体工厂装置数据在作为第一修改数据和/或第二修改数据的功能对控制数据进行的初始修改期间位于容许范围之外,则重新开始作为第一修改数据和/或第二修改数据的功能对控制数据进行的修改,所述修改不同于所述初始修改。
[0049]
如果发现实体工厂装置数据在对控制数据的初始尝试的修改期间在容许范围之外,则可重新开始使用第一修改数据和/或第二修改数据对控制数据进行的修改。例如,在对控制数据的后续修改中,可改变控制数据的参数的修改次序。因此,由ai-r应用和/或ai-g应用建议的修改可以实体工厂装置数据不离开容许范围的方式应用于控制装置,从而确保实体工厂装置的正确操作。
[0050]
根据又一实施例,
[0051]
虚拟控制应用被配置成根据由ipc装置接收的所接收指令产生虚拟控制数据;
[0052]
仿真应用被配置成使用数字孪生体对利用根据所接收指令产生的虚拟控制数据控制的实体工厂装置进行仿真;并且
[0053]
虚拟控制应用被配置成基于来自仿真应用的对利用根据所接收指令产生的虚拟控制数据控制的实体工厂装置进行的仿真的结果,判断所接收指令是否安全。
[0054]
当所述ipc装置例如从用户或从外部装置接收到指令时,这些指令可使用数字孪生体来验证。具体来说,此种指令对实体工厂装置的操作的影响可利用仿真应用来仿真。在一些实施例中,如果由数字孪生体进行的仿真指示使用所接收指令将是安全的,则所述ipc装置仅实施所接收指令。因此,可改进所述ipc装置的安全性及实体工厂装置的安全性。
[0055]
根据又一实施例,ai-g应用包括各自被配置成使用不同的人工智能算法来提供第二修改结果的多个子应用。第二修改结果可对应于先前描述的第二修改数据。
[0056]
使用不同的ai算法可为有益的,原因在于可获得不同的第二修改结果作为用于修改虚拟控制数据和/或(真实)控制数据的提议。实体工厂装置的控制及操作可利用多种第二修改结果以更高效的方式得到改进。使用不同的ai算法可进一步增加所述ipc装置的灵活性。
[0057]
根据又一实施例,ai-g应用被配置成对由所述多个子应用提供的第二修改结果中的至少一些进行组合,以产生第二修改数据,且将第二修改数据传输到ai-r应用。
[0058]
根据又一实施例,第一ai算法与第二ai算法是不同的ai算法。由于可收集来自每种ai算法的最佳结果,因此在学习周期中使用两种不同的ai算法可为有用的。实体工厂装置的控制及操作可利用多种第二修改结果以更高效的方式得到改进。
[0059]
根据又一实施例,第一ai算法及第二ai算法用于产生与实体工厂装置的不同功能相关的第一修改数据及第二修改数据,所述功能包括以下中的至少一个:实体工厂装置的预测维护,提供关于实体工厂装置的维护的预测;预测控制,提供关于实体工厂装置的控制的预测;整体装备有效性和/或功率效率预测,提供关于实体工厂装置的功率效率的预测。
[0060]
ai-g及ai-r可用于并行地训练和/或改进实体工厂装置的不同方面(功能)。
[0061]
根据又一实施例,所述ipc装置还包括用于虚拟分离gpos与rtos的管理程序单元(hypervisor unit)。管理程序单元可为管理程序(也称为“虚拟机监视器(virtual machine monitor)”)。管理程序可进一步使得不同操作系统之间(特别是gpos与rtos之间)能够进行通信。所述通信可为安全通信。
[0062]
根据又一实施例,所述ipc装置包括通过管理程序单元与gpos及rtos虚拟分离的又一操作系统,其中ai-g应用及ai-r应用在所述又一操作系统内部运行。所述又一操作系统可对应于又一虚拟机。
[0063]
根据又一实施例,扩展卡被配置成通过管理程序单元与rtos及gpos进行通信。具体来说,扩展卡可被虚拟化为通过管理程序单元与其他操作系统进行通信的主机操作系统或虚拟化虚拟机。
[0064]
本文中所描述的各种应用(ai-g应用、ai-r应用、控制应用等)以及数字孪生体可实施为软件和/或硬件。
[0065]
根据第二方面,提供一种用于根据第一方面或其实施例的ipc装置的扩展卡。扩展卡包括ai-g应用及ai-r应用,且可插入到所述ipc装置中。详细来说,所述ipc装置可包括用于插入扩展卡的狭缝(slit)。扩展卡可以可移除的方式插入到所述ipc装置中。具体来说,第二方面的扩展卡对应于在第一方面的实施例中描述的扩展卡。
[0066]
根据第三方面,提供一种工厂系统,所述工厂系统包括根据第一方面或其实施例的ipc装置及由所述ipc装置控制的实体工厂装置。实体工厂装置可为上文定义的工厂装置。
[0067]
根据第四方面,提供一种用于操作包括实时操作系统(rtos)及通用操作系统(gpos)的工业pc(ipc)装置的方法。所述方法包括:
[0068]
使用控制应用产生控制数据;
[0069]
使用控制应用根据所产生的控制数据控制实体工厂装置的操作;
[0070]
提供实体工厂装置的数字拷贝作为在gpos内运行的数字孪生体;
[0071]
产生虚拟控制数据;
[0072]
使用数字孪生体对实体工厂装置在其被利用虚拟控制数据控制时的操作进行仿真;
[0073]
使用与控制应用交互的实时人工智能(ai-r)应用执行第一人工智能算法,第一人工智能算法接收实体工厂装置数据及控制数据作为输入且提供第一修改数据作为输出,其中实体工厂装置数据包括指示实体工厂装置的操作的数据;
[0074]
作为第一修改数据的功能来修改控制数据;
[0075]
使用与数字孪生体交互的通用人工智能(ai-g)应用执行第二人工智能算法,第二人工智能算法使用数字孪生体数据及虚拟控制数据作为输入且提供第二修改数据作为输出,其中数字孪生体数据包括指示使用数字孪生体对实体工厂装置进行的仿真的数据;以及
[0076]
作为第二修改数据的功能来修改虚拟控制数据。
[0077]
具体来说,根据第四方面的用于操作所述ipc装置的方法在根据第一方面或其实施例的所述ipc装置上进行操作。
[0078]
参照ipc装置(第一方面及其实施例)描述的实施例及特征经必要修改后适用于所述方法(第四方面)、工厂系统(第三方面)及扩展卡(第二方面)。
[0079]
本发明的其他可能的实施方式或替代解决方案还囊括上文或下文针对实施例描述的特征的组合(本文中未明确提及)。所属领域中的技术人员还可向本发明的最基本形式添加个别的或孤立的方面及特征。
[0080]
通过结合附图阅读后续说明及权利要求,本发明的进一步的实施例、特征及优点将变得显而易见,在附图中:
[0081]
图1示出根据第一实施例的工厂系统。
[0082]
图2示出根据第一实施例的用于操作ipc装置的方法。
[0083]
图3示出根据第二实施例的用于操作ipc装置的方法。
[0084]
图4、图5及图6示出对控制数据的修改的实例。
[0085]
图7示出用于实行高风险学习或低风险学习的方法的实例。
[0086]
图8示出用于验证所接收指令的方法的实例。
[0087]
图9示出ai-g应用的实例。
[0088]
图10示出ipc装置的实施例。
[0089]
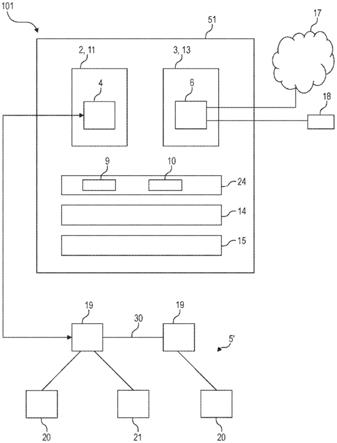
图11示出根据第二实施例的工厂系统。
[0090]
图12示出ipc装置的实例。
[0091]
图13示出用于安装ai-r应用及ai-g应用的方法的实例。
[0092]
图14示出ai-r应用及ai-g应用的分配的实例。
[0093]
在所述图中,除非另外指明,否则相同的参考编号表示相同或功能上等效的元件。
[0094]
图1示出根据第一实施例的工厂系统100。工厂系统100包括根据第一实施例的ipc装置1及由ipc装置1控制的实体工厂装置(pfd)5。在本情形中,工厂系统100是用于利用实体工厂装置5生产产品的自动化系统,在此处所述自动化系统是机器。
[0095]
ipc装置1包括rtos 2、gtos 3、ai-r应用9及ai-g应用10。rtos 2与gpos 3是ipc装置1的两个虚拟分离的操作系统。rtos 2包括在rtos 2内运行的控制应用4。gpos 3具有虚拟地表示在gpos 3内运行的实体工厂装置5的数字孪生体6。数字孪生体6包括虚拟控制应用7及仿真应用8。
[0096]
ipc装置1可被虚拟分离成满足工业实时通信要求的实时环境与不满足工业实时通信要求的通用环境。实时环境包括rtos 2及ai-r应用9,而通用环境包括gpos 3及ai-g应用10。
[0097]
工厂系统100的ipc装置1可根据用于操作ipc装置1的方法来操作。图2中示出此种方法的第一实施例。在下文中,将一起针对图1及2来描述图1所示ipc装置1的功能。
[0098]
在步骤s1中,控制应用4产生控制数据cd。控制数据cd是用于控制机器5的数据。控制数据cd包括关于如何设定机器5的特定参数、何时将机器5接通及关断等的指示。
[0099]
在步骤s2中,控制应用4使用控制数据cd控制机器5的操作。控制应用4由此通过总线将控制数据cd传输到机器5。然后,机器5根据控制数据cd所规定的方式进行操作。具体来说,机器5根据由控制数据cd提供的参数值设定特定参数。机器5的操作可由实体工厂装置数据(机器数据)pd来描述。机器数据pd是由位于机器5上的传感器获得的传感器数据。
[0100]
与此并行,在步骤s3中,在通用环境中,提供数字孪生体6,以例如表示真实机器5。虚拟控制应用7以与控制应用4相似的方式、但是在通用环境中进行操作。详细来说,在步骤s4中,虚拟控制应用7产生用于控制数字孪生体6的虚拟控制数据vcd。虚拟控制数据vcd可根据由控制应用4产生的控制数据cd来产生。在步骤s5中,可使用数字孪生体6执行仿真应用8,以例如对机器5的操作进行仿真,就如同机器5被利用虚拟控制数据vcd控制一样。由数字孪生体6对机器5进行的仿真的结果可由数字孪生体数据dd描述。
[0101]
在步骤s6中,在实时环境中,ai-r应用9执行第一ai算法ai1。所述第一ai算法ai1是接收控制数据cd及机器数据pd作为输入的神经网络算法。作为输出,第一ai算法ai1产生第一修改数据md1。第一修改数据md1是在步骤s7中届时由控制应用4用来修改控制数据cd的数据。具体来说,第一ai算法ai1将第一修改数据md1确定成使得第一修改数据md1可通过控制应用4改进机器5的控制,从而也改进机器5的操作(例如在效率、能量消耗等方面)。
[0102]
与步骤s6并行,在步骤s8中,在通用环境中,ai-g应用10执行第二ai算法ai2。所述第二ai算法ai2是接收虚拟控制数据vcd及数字孪生体数据dd作为输入的神经网络算法。作为输出,第二ai算法ai2产生第二修改数据md2。第二修改数据md2是在步骤s9中届时由虚拟控制应用7用来修改虚拟控制数据vcd的数据。具体来说,第二ai算法ai2将第二修改数据md2确定成使得第二修改数据md2改进被利用数字孪生体6进行仿真的机器5的虚拟控制。
[0103]
在步骤s7及s9之前或之后,ai-g应用10与ai-r应用9可可选地彼此交换例如控制数据cd、虚拟控制数据vcd、第一修改数据md1和/或第二修改数据md2、和/或反馈数据fd等数据。在下文中,将详细描述此种可选的数据交换。
[0104]
图3示出根据第二实施例的用于操作ipc装置1的方法。根据第二实施例的方法与图2所示第一实施例的方法的不同之处在于,根据第二实施例的方法还包括步骤s10-s15。
[0105]
在步骤s10中,ai-g应用10将第二修改数据md2传输到ai-r应用9。然后,在步骤s11中,ai-r应用9判断是否使用第二修改数据md2来修改控制数据cd。此种判断可使用ai-r应用9的第一ai算法ai1来实行。
[0106]
如果ai-r应用9决定不使用所接收的第二修改数据md2,则ai-r应用9向ai-g应用10发送反馈数据fd,指示将不使用第二修改数据md2来修改控制数据cd(图3所示步骤s12)。作为另外一种选择,如果ai-r应用决定(至少部分地)使用第二修改数据md2,则ai-r应用指令控制应用4作为第二修改数据md2的至少部分的功能来修改控制数据cd(图3所示步骤s13)。
[0107]
一旦已作为第二修改数据md2的功能修改控制数据cd,在步骤s14中,ai-r应用9就会向ai-g应用10发送反馈数据fd,指示第二修改数据md2至少部分用于修改控制数据cd。
[0108]
在一些实施例中,反馈数据fd还包括关于利用使用第二修改数据md2所修改的控制数据cd控制的机器5的操作与修改前相比是否确实得到改进的指示。在此种情形中,ai-r
应用9通过利用经修改的控制数据cd控制机器5并观察因此种控制产生的机器数据pd来测试经修改的控制数据cd的有用性。
[0109]
在接收到反馈数据fd之后,在步骤s15中,ai-g应用10针对反馈数据fd来修改数字孪生体6和/或第二ai算法ai2。因此,例如,如果第二修改数据md2对于ai-r应用9没有用,则第二ai算法ai2可适以避免寻找与所述被拒绝的第二修改数据md2相似的修改。因此,可改进使用第二修改数据md2的学习进程。
[0110]
因此,ipc装置1能够实行两个并行的学习进程——一个在实时环境中,且一个在通用环境中。因此,可以更高效的方式改进机器5的控制及操作。
[0111]
可修改图2及3中所示方法的步骤s1-s15的次序。此外,在发送第二修改数据md2之前,可使用ai-g应用10来测试第二修改数据md2的有用性。详细来说,可使用数字孪生体6对利用使用第二修改数据md2所修改的虚拟控制数据vcd对机器5进行的控制进行仿真,且可由ai-g应用10分析所述仿真的结果。只有当ai-g应用10确定仿真结果良好时,才可向ai-r应用9发送第二修改数据md2。否则,将第二修改数据md2例如存储在存储单元(未示出)中。
[0112]
图4、5及6示出作为第二修改数据md2的功能对控制数据cd进行的修改(对应于步骤s13)的实例。控制数据cd可作为第一修改数据md1的功能来修改(对应于步骤s7)或者作为第一修改数据md1与第二修改数据md2二者沿相同的线路的功能进行修改。
[0113]
如图4中所示,初始控制数据cd由两个参数p1及p2定义。在真实系统中,控制数据cd可由更多的参数来定义,但为简化表示,在此处控制数据cd仅取决于两个参数p1及p2。由第二修改数据md2修改的控制数据cd被示为“cd建议”,且还以所述两个参数p1及p2为特征,与初始控制数据cd的值相比,所述两个参数的值均被修改(在此处为增大)。
[0114]
为修改初始控制数据cd并获得经修改的控制数据cd,控制应用4可实行逐步优化。在图4及5中,每个步骤由一个点指示。在每个步骤中,控制数据cd被轻微修改,以使得参数p1及p2更接近由第二修改数据md2建议的参数p1及p2。在控制数据cd的每次轻微修改之后,控制应用4验证利用经修改的控制数据cd进行操作的机器5的机器数据pd在容许范围内。容许范围在图6中被示为高于最小值线“min”的一切范围。
[0115]
如果机器数据pd被确定为在容许范围内,则根据第二修改数据md2进一步修改控制数据cd,直到参数p1及p2达到由第二修改数据md2所规定的值为止。然而,如果在所述修改中的一次修改之后机器数据pd被确定为在容许范围之外,则将控制数据cd的参数p1及p2重置到其初始值(图5所示箭头编号1及2),且以不同方式、遵循其中参数p1与p2被修改到不同程度且被以不同次序修改的不同路径来重新开始根据第二修改数据md2对控制数据cd进行的修改(图5中的箭头编号3)。对控制数据cd的此种逐步修改使得机器5的操作能够被受控地修改,其中机器5不暴露于任何不必要的风险且以正确的方式连续操作。
[0116]
图7示出利用ipc装置1实行高风险学习或低风险学习的方法的实例。所述方法可为针对图2及3描述的用于操作ipc装置1的方法的一部分。
[0117]
在图7所示步骤s30中,ipc装置1判断ipc装置1将希望实行以改进机器5的操作的学习步骤是高风险学习步骤还是低风险学习步骤。高风险学习步骤是当其在真实实体机器上(在实时环境中)实行时将使机器5暴露于高风险的学习步骤。低风险学习步骤是当其在真实实体机器上(在实时环境中)实行时将使机器5暴露于低风险的学习步骤。
[0118]
避免将机器5暴露于高风险是优选的,这是因为此可能会毁坏机器5。例如,如果学
习步骤包括对机器5进行其中几种危险化学品混合在一起的测试,则可能存在爆炸的风险,且在此种情形中,不应在真实机器5上实行所述学习测试。
[0119]
因此,如果学习步骤是高风险学习步骤,则使用ai-g应用10来实行所述高风险学习步骤(步骤s30)。使用数字孪生体6对有风险的进程进行仿真,而不是在机器5上进行测试,从而保护机器5。
[0120]
在步骤s32中,ai-g应用10判断所测试进程是否确实将机器5暴露于高风险,或者所述进程是否可被优化以降低机器5的风险。如果发现仅将机器5暴露于低风险的优化,则在步骤s34中如先前已描述般向ai-r应用9发送所得的第二修改数据md2。作为另外一种选择,如果没有发现将机器5暴露于低风险的优化,则在步骤s33中将此结果存储在存储单元中。
[0121]
另一方面,对于低风险学习进程,在步骤s35中,在ai-r应用9上直接启动学习。ai-r应用9执行先前描述的步骤s1、s2、s6及s7。具体来说,基于作为学习进程的结果获得的第一修改数据md1来修改控制数据cd。
[0122]
在步骤s37中,ai-r应用9通过利用根据第一修改数据md1所修改的控制数据cd控制机器5来测试第一修改数据md1的有用性。依据因此测试操作产生的机器数据pd,在步骤s38中,ai-r应用9判断第一修改数据md1是否有用(成功)。在第一修改数据md1被确定为有用的情况下,在步骤s39中更新数字孪生体6,特别是更新产生虚拟控制数据vcd的虚拟控制应用7。否则,将第一修改数据md1存储在存储单元中(步骤s33)。
[0123]
图8示出用于验证所接收指令的方法的实例。所述方法可为针对图2及3描述的用于操作ipc装置1的方法的一部分。
[0124]
所接收指令是与控制数据cd相关的指令,所述指令由ipc装置1在图8所示步骤s40中从用户或外部装置(例如云)接收。在通过在控制数据cd中实施所接收指令来施行所述所接收指令之前,所述所接收指令由ipc装置1验证以避免机器5的不适当操作。
[0125]
在步骤s41中,此验证包括使用数字孪生体6对指令进行的仿真。详细来说,数字孪生体6对根据所接收指令控制的机器5的操作进行仿真。
[0126]
在步骤s42中,ai-g应用10基于仿真的结果判断机器5根据所接收指令进行的操作是否安全且符合其他要求。如果确定出所接收指令是安全的且符合所有要求,则在步骤s45中,将所接收指令转发到ai-r应用9,以在具有真实机器5的真实系统中使用。否则,如果确定出所接收指令不安全和/或不符合所有要求,则在步骤s43中通过警报通知ipc装置1的用户,且在步骤s44中将仿真的结果存储在存储单元中。因此,以上方法使得能够验证所接收指令,以保证机器5的安全性。
[0127]
图9示出ai-g应用10’的实例。ai-g应用10’可代替ipc装置1的ai-g应用10。ai-g应用10’包括各自能够执行不同的第二ai算法ai2a、ai2b及ai2c的三个子应用27-29。ai算法ai2a是神经网络算法,ai算法ai2b是依赖于决策树的算法,且ai算法ai2c是最近邻算法。
[0128]
子应用27-29中的每一个子应用接收虚拟控制数据vdc及数字孪生体数据dd作为其ai算法ai2a-ai2c的输入,且提供第二修改结果md2a-md2c作为输出。第二修改结果md2a-md2c可直接对应于先前描述的ai-g应用10的第二修改数据md2。作为另外一种选择,ai-g应用10’可对第二修改结果md2a-md2c进行组合,以例如形成第二修改数据md2,控制数据cd和/或虚拟控制数据vcd基于第二修改数据md2进行修改。使用不同ai算法ai2a
–
ai2c是有用
的,这是因为此使得能够更佳地且更快地优化控制数据cd。
[0129]
图10示出ipc装置50的第二实施例。ipc装置50与第一实施例的ipc装置1的不同之处在于,rtos 2设置在第一虚拟机11上,ai-r应用9及ai-g应用10设置在第二虚拟机12上,且gpos 3设置在第三虚拟机13上。虚拟机11、12、13通过管理程序单元14彼此虚拟分离。管理程序单元14向相应的虚拟机11-13提供管理程序数据hd,且将虚拟机11-13与ipc装置50的硬件组件15分离。
[0130]
ipc装置50的组件具有与上文针对ipc装置1描述的功能相同的功能。具体来说,ipc装置50能够根据上文描述的方法进行操作,特别是根据图2及3所示方法进行操作。
[0131]
图11示出根据第二实施例的工厂系统101。工厂系统101包括实体工厂装置5’、根据第三实施例的用于控制实体工厂装置5’的ipc装置51、云17及人机界面(human-machine interface,hmi)18。
[0132]
实体工厂装置5’包括经由总线30连接的两个主装置19,且控制两个传感器20及致动器21的操作。根据第三实施例的ipc装置51与根据第二实施例的ipc装置50的不同之处在于,ai-r应用9及ai-g应用10设置在扩展卡24上而不是虚拟机12中。除此之外,ipc装置51与ipc装置50相同,且可实行相同的功能,且特别是根据图2及3所示方法来执行。
[0133]
在图11所示工厂系统101中,数字孪生体6可通过hmi 18从云17及从用户接收数据。此数据可例如用于更新数字孪生体6和/或虚拟控制数据vcd。另外,云17可对应于先前描述的存储单元,非有用的第二修改数据md2被存储到所述存储单元。数字孪生体6还可通过hmi 18向用户发出警报等。
[0134]
图12示出ipc装置51的更详细的图。所述ipc装置51包括主ipc板22,主ipc板22包括主处理器23。此外,扩展卡24包括卡板26及用于将卡板26连接到主板22的连接件25,ai-r应用9及ai-g应用10位于卡板26上。扩展卡24是可移除的卡,其可被以可移除的方式插入到ipc装置51的插槽(slot)中,以向其提供ai-r应用9及ai-g应用10以及ai-r应用9及ai-g应用10的并行学习功能性。
[0135]
图13示出用于将ai-r应用9及ai-g应用10安装到ipc装置51中的方法的实例。在步骤s20中,将扩展卡24插入到ipc装置51中。在后续步骤s21中,管理程序单元14检测扩展卡24的存在。在步骤s22中,管理程序单元14判断是否安装有ai层16(未示出)。ai层16是处置扩展卡24的分配并促进ai-r应用9与ai-g应用10之间的高效倒换的层。图14中示出此种分配的实例。
[0136]
如果安装有ai层16,则在步骤s27中将扩展卡24分配给ai层16。然后,在步骤s28中,管理程序单元14使分配给ai层16的ipc装置51的核(core)的数目最小化。如果存在任何空闲核,则在步骤s29中,管理程序单元14将这些核添加到rtos 2和/或gpos 3。
[0137]
作为另外一种选择,如果没有安装ai层16,则在步骤s23中,管理程序单元14将gpos3的一些核分配给ai层16。然后,在步骤s24中,管理程序单元14将扩展卡24分配给ai层16。在步骤s25中,安装ai层16。然后,在步骤s26中,管理程序单元建立ai层16与rtos 2及gpos 3之间的通信。
[0138]
尽管已根据优选实施例描述了本发明,然而对于所属领域中的技术人员来说显而易见的是,在所有实施例中均可进行修改。例如,第一ai算法与第二ai算法可为两种不同的ai算法,例如神经网络算法与决策树算法。除此之外,由第一ai算法ai1及第二ai算法ai2
和/或由所述多个第二ai算法ai2a-ai2c修改和/或优化的功能可为不同的,且包括例如实体工厂装置的预测控制或实体工厂装置的预测维护。
[0139]
符号的说明
[0140]
1:ipc装置
[0141]
2:rtos
[0142]
3:gpos
[0143]
4:控制应用
[0144]
5、5’:实体工厂装置
[0145]
6:数字孪生体
[0146]
7:虚拟控制应用
[0147]
8:仿真应用
[0148]
9:ai-r应用
[0149]
10、10’:ai-g应用
[0150]
11-13:虚拟机
[0151]
14:管理程序单元
[0152]
15:硬件组件
[0153]
16:ai层
[0154]
17:云
[0155]
18:人机界面
[0156]
19:主装置
[0157]
20:传感器
[0158]
21:致动器
[0159]
22:主ipc板
[0160]
23:主处理器
[0161]
24:扩展卡
[0162]
25:连接件
[0163]
26:卡板
[0164]
27-29:子应用
[0165]
30:总线
[0166]
50、51:ipc装置
[0167]
100:工厂系统
[0168]
101:工厂系统
[0169]
ai1:第一人工智能算法
[0170]
ai2:第二人工智能算法
[0171]
ai2a-ai2c:第二人工智能算法
[0172]
cd:控制数据
[0173]
dd:数字孪生体数据
[0174]
fd:反馈数据
[0175]
hd:管理程序数据
[0176]
md1:第一修改数据
[0177]
md2:第二修改数据
[0178]
md2a-md2c:第二修改数据
[0179]
p1、p2:参数
[0180]
pd:实体工厂装置数据
[0181]
vcd:虚拟控制数据
[0182]
s1-s15:方法步骤
[0183]
s20-s45:方法步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1