基于5G通信的伺服驱动器及其控制方法、运动控制系统与流程
基于5g通信的伺服驱动器及其控制方法、运动控制系统
技术领域
1.本发明涉及伺服电机驱动控制技术领域,更具体而言,涉及一种基于5g通信的伺服驱动器及其控制方法、和包括该伺服驱动器的运动控制系统。
背景技术:
2.伺服驱动器是用于驱动伺服电机进行运动的设备,伺服驱动器直接接收控制器的控制指令工作,现有的伺服驱动器一般都支持方向+脉冲、现场总线等控制方式。目前伺服驱动器都是物理线缆连接到控制器,一般一个控制器可以连接并控制一组伺服驱动器。当将这些伺服驱动器在工业上规模使用时,需要做大量复杂的布线设计和安装工作。而且受限于物理连接线缆限制,伺服驱动器网络扩展也受距离限制。此外,当网络出现问题时,也不利于查找问题以及更换或维修伺服驱动器等。
技术实现要素:
3.本发明的目的在于提供了一种基于5g通信的伺服驱动器及其控制方法、运动控制系统,通过利用5g无线通信技术的大容量和低延时特性以解决现有的伺服驱动器在工业上规模使用时存在的上述问题中的至少一个问题。
4.为了实现上述目的,本发明一方面提供了一种基于5g通信的伺服驱动器,包括:
5.电机驱动电路板,与伺服电机连接,用于根据控制指令驱动所述伺服电机运动以及用于接收所述伺服电机运动的反馈信号;
6.5g通信模块,分别与外部控制器和所述电机驱动电路板连接,用于接收所述控制器发送的所述控制指令并将所述控制指令传输给所述电机驱动电路板,以及用于接收所述电机驱动电路板发送的所述反馈信号并将所述反馈信号传输给所述控制器。
7.优选的,所述基于5g通信的伺服驱动器还包括协议转换模块和与所述协议转换模块连接的现场总线模块,所述协议转换模块与所述5g通信模块连接,所述现场总线模块与所述电机驱动电路板连接,所述协议转换模块用于进行所述5g通信模块的5g协议和所述现场总线模块的现场总线协议之间的转换。
8.优选的,所述基于5g通信的伺服驱动器还包括与外接供电电源连接的电源模块,所述电源模块分别与所述5g通信模块和所述电机驱动电路板连接。
9.优选的,所述电机驱动电路板包括控制处理单元以及与所述控制处理单元连接的驱动单元,所述控制处理单元与所述现场总线模块连接,所述驱动单元与所述伺服电机连接,用于根据所述控制指令驱动所述伺服电机运动。
10.优选的,所述驱动单元上集成有用于驱动所述伺服电机运动的驱动电路。
11.为了进一步实现上述目的,本发明另一方面提供了一种如上述任一项实施例所述的基于5g通信的伺服驱动器的控制方法,包括:
12.通过5g通信网络接收控制器的控制指令;
13.根据所述控制指令驱动伺服电机运动并接收编码器的反馈信号;
14.通过所述5g通信网络将所述反馈信号发送至所述控制器。
15.为了进一步实现上述目的,本发明另一方面还提供了一种运动控制系统,包括至少一个控制器、若干个与所述控制器连接的伺服驱动器、以及分别与对应的所述伺服驱动器连接的伺服电机,所述伺服驱动器为上述任一项实施例所述的基于5g通信的伺服驱动器。
16.优选的,所述伺服电机与对应的所述伺服驱动器之间连接有驱动控制线和反馈线。
17.优选的,所述伺服电机包括用于测量所述伺服电机运动信息的编码器,所述编码器通过所述反馈线与对应的所述伺服驱动器连接。
18.与现有技术相比,本发明提供的基于5g通信的伺服驱动器通过5g通信模块实现外部控制器与电机驱动电路板之间的无线通信连接,无需布线,使得伺服驱动器的部署范围不受距离限制,方便快速部署、调试、应用以及维修和调整。同时,维修更换时,控制器端和伺服驱动器端可以隔离操作,不存在耦合,简单便捷。
附图说明
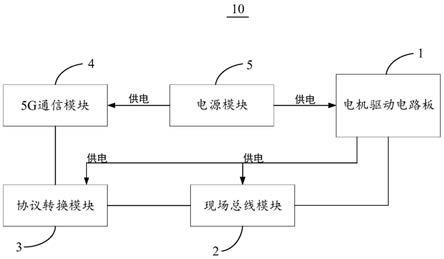
19.图1是本发明实施例基于5g通信的伺服驱动器的结构框图;
20.图2是本发明实施例基于5g通信的伺服驱动器中电机驱动电路板的结构框图;
21.图3是本发明实施例运动控制系统的结构框图;
22.图4是本发明实施例基于5g通信的伺服驱动器的控制方法的流程示意图。
具体实施方式
23.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
24.请参阅图1所示,本发明实施例提供了一种基于5g通信的伺服驱动器10,主要包括电机驱动电路板1和5g通信模块4。其中,所述电机驱动电路板1与伺服电机连接,用于根据控制指令驱动所述伺服电机运动以及用于接收所述伺服电机运动的反馈信号。所述5g通信模块4以5g无线网络的方式分别与外部控制器和所述电机驱动电路板1连接,所述5g通信模块4用于接收所述控制器发送的所述控制指令并将所述控制指令传输给所述电机驱动电路板1,以及用于接收所述电机驱动电路板1发送的所述反馈信号并将所述反馈信号传输给所述控制器。
25.本实施例的5g通信模块4具有高宽带(10gbps)、低延时(<1ms)的特性,能够满足控制器与电机驱动电路板1之间的控制通讯要求。并且,本实施例中的5g通信模块4所使用的5g技术支持每10万-100万连接每平方千米,能够支持构建伺服驱动器10的大规模使用阵列。
26.本发明实施例提供的基于5g通信的伺服驱动器10通过5g通信模块4实现外部控制器与电机驱动电路板1之间的无线通信连接,无需布线,使得伺服驱动器10的部署范围不受距离限制,方便快速部署、调试、应用以及维修和调整。同时,维修更换时,控制器端和伺服驱动器端可以隔离操作,不存在耦合,简单便捷。
27.可选的,所述电机驱动电路板1根据所述伺服电机运动的反馈信号闭环控制所述伺服电机运动。
28.具体的,所述基于5g通信的伺服驱动器10还包括协议转换模块3和与所述协议转换模块3连接的现场总线模块2,所述协议转换模块3与所述5g通信模块4连接,所述现场总线模块2与所述电机驱动电路板1连接。所述协议转换模块3用于进行所述5g通信模块4的5g协议和所述现场总线模块2的现场总线协议之间的转换。通过协议转换模块3能够实现所述5g通信模块4与所述电机驱动电路板1之间的兼容性。
29.本实施例的现场总线模块2包括但不限于canopen总线、ethercat总线,用于控制器和所述电机驱动电路板1之间的信息传输,如用于控制器将控制指令中包含的控制信息传输至对应的电机驱动电路板1,以及用于将所述电机驱动电路板1发送的反馈信号传输至控制器。
30.具体的,所述基于5g通信的伺服驱动器10还包括与外接供电电源连接的电源模块5,所述电源模块5分别与所述5g通信模块4和所述电机驱动电路板1连接,以分别为所述5g通信模块4和所述电机驱动电路板1供电。所述电机驱动电路板1直接内部给所述现场总线模块2和所述协议转换模块3供电。
31.本实施例提供的伺服驱动器10只有电源模块5需要外接供电线缆,与控制器端通信使用5g无线通信技术,不需要布线,便于部署、安装、维修和调整。
32.进一步的,请参阅图2所示,所述电机驱动电路板1包括控制处理单元11以及与所述控制处理单元11连接的驱动单元12。其中,所述控制处理单元11与所述现场总线模块2连接,所述驱动单元12与所述伺服电机连接,用于根据所述控制指令驱动所述伺服电机运动。
33.进一步的,所述驱动单元12上集成有用于驱动所述伺服电机运动的驱动电路,所述驱动电路与所述伺服电机连接。
34.请参阅图3所示,本发明实施例还提供了一种运动控制系统100,包括至少一个控制器20、若干个与所述控制器20连接的伺服驱动器10、以及分别与各个所述伺服驱动器10连接的伺服电机30,所述伺服驱动器10为上述实施例所述的基于5g通信的伺服驱动器10,其与对应的所述控制器20之间通过5g无线网络通信连接。
35.具体的,所述伺服电机30与对应的所述伺服驱动器10之间连接有驱动控制线a和反馈线b,所述伺服驱动器10通过所述驱动控制线a驱动所述伺服电机30运动。需要说明的是,所述驱动控制线a和所述反馈线b均设于所述伺服电机30内,为所述伺服电机30的内部接线。
36.进一步的,所述伺服电机30包括用于测量所述伺服电机30运动信息的编码器(图中未示出),所述编码器通过所述反馈线b与对应的所述伺服驱动器10连接,用于将测量到的运动信息生成反馈信号传输至所述伺服驱动器10。具体的,所述编码器与所述伺服驱动器10的电机驱动电路板1连接,更具体的,所述编码器与所述电机驱动电路板1的控制处理单元11连接。
37.在本实施例的运动控制系统100中,当使用任意一台伺服驱动器10时,只需连接上与其对应的伺服电机30的驱动控制线a和反馈线b,再接上外接供电电源,即可完成安装,控制器20通过5g无线通信方式连接到伺服驱动器10工作。
38.请参阅图4所示,图4是本发明实施例的基于5g通信的伺服驱动器的控制方法的流
程示意图。需注意的是,若有实质上相同的结果,本发明的方法并不以图4所示的流程顺序为限。如图4所示,该方法包括步骤:
39.步骤s301:通过5g通信网络接收控制器的控制指令。
40.在步骤s301中,控制器设置在伺服驱动器的外部,不受距离的限制。本实施例的5g通信网络采用无线的方式接收控制器的控制指令,5g通信网络具有高宽带(10gbps)、低延时(<1ms)的特性,不仅能够满足控制器与伺服驱动器之间的控制通讯要求,还能够支持构建伺服驱动器的大规模使用阵列。
41.步骤s302:根据所述控制指令驱动伺服电机运动并接收编码器的反馈信号。
42.在步骤s302中,伺服驱动器接收到所述控制指令后,根据所述控制指令驱动伺服电机运动。当伺服电机运动时,通过设置在伺服电机上的编码器实时测量伺服电机运动信息,生成反馈信号反馈至伺服驱动器。可选的,伺服驱动器根据所述编码器的反馈信号闭环控制所述伺服电机运动。
43.步骤s303:通过所述5g通信网络将所述反馈信号发送至所述控制器。
44.本发明实施例的基于5g通信的伺服驱动器的控制方法通过5g无线通信的方式接收控制器的控制指令以及发送反馈信号,替代传统的有线连接方式,使得伺服驱动器的部署范围不受距离限制,方便快速部署、调试、应用以及维修和调整。同时,维修更换时,控制器端和伺服驱动器端可以隔离操作,不存在耦合,简单便捷。
45.以上所述的仅是本发明的实施方式,在此应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出改进,但这些均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1