行驶控制装置、移动体以及运行系统的制作方法
行驶控制装置、移动体以及运行系统
1.本申请以日本专利申请2019-196650(申请日:10/29/2019)为基础,根据该申请享受优先权。本申请通过参照该申请而包含该申请的全部内容。
技术领域
2.本发明的实施方式涉及行驶控制装置、移动体以及运行系统。
背景技术:
3.在按照运行计划使多个移动体同时进行行驶的情况下,若这些移动体能够以按照计划的定时在所计划的行驶路线上行驶,则能够实现按照计划的运行。然而,当至少某一移动体的行驶定时偏离计划时,有时会在移动体间产生竞争。例如,有时移动体彼此会碰撞或者追尾,有时会产生移动体无法在任意的地方移动的僵持(deadlock,停滞)。
技术实现要素:
4.本发明的实施方式提供能够进行避免移动体的竞争的运行的行驶控制装置、移动体以及运行系统。
5.用于解决问题的技术方案
6.作为本发明的实施方式的行驶控制装置具备:移动指令数据生成部,其取得第1移动体在行驶区中的行驶路线、和通过顺序信息,确定第3区域,基于所述第3区域和所述通过顺序信息来生成所述第1移动体的移动指令数据,所述行驶区包括多个第1区域和设定于所述多个第1区域之间的多条行驶道路中的至少一条行驶道路的第2区域,所述通过顺序信息决定了包括所述第1移动体的多个移动体通过所述行驶路线所包含的所述第1区域的顺序,所述第3区域是在所述行驶路线中位于所述第1区域之前的所述第2区域;和通信部,其向所述第1移动体发送所述移动指令数据。
附图说明
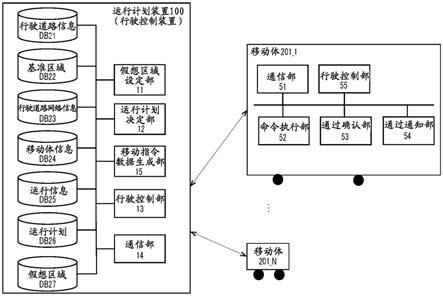
7.图1是第1实施方式涉及的运行计划装置和移动体的框图。
8.图2是示意性地表示了对多个移动体的运行进行控制的状况的俯视图。
9.图3的(a)是表示碰撞的例子的图,图3的(b)是表示僵持的例子的图。
10.图4是表示行驶道路网络的一个例子的图。
11.图5是表示行驶道路网络的构造信息的例子的图。
12.图6的(a)是表示行驶道路的信息的例子的图,图6的(b)是表示基准节点的信息的例子的图。
13.图7是表示在与行驶道路网络的基准区域结合了的各行驶道路设定了假想区域的例子的图。
14.图8是表示假想区域db的例子的图。
15.图9是表示对行驶道路网络的构造信息追加了假想节点的例子的图。
16.图10是假想区域设定部的动作的一个例子的流程图。
17.图11是表示运行信息的一个例子的图。
18.图12是表示运行计划决定部所制作的运行计划的例子的图。
19.图13是表示移动体配置于出发地点的状态的图。
20.图14是表示移动指令数据的例子的图。
21.图15是图1的运行计划装置的动作的一个例子的流程图。
22.图16是图1的运行计划装置的动作的其他例子的流程图。
23.图17是表示移动体的动作的一个例子的流程图。
24.图18是第2实施方式涉及的运行计划装置和移动体的框图。
25.图19是表示对agv0和agv1生成的移动指令数据的例子的图。
26.图20是表示移动体的动作的一个例子的流程图。
27.图21是表示图1的运行计划装置的硬件结构的图。
28.标号说明
29.11:假想区域设定部
30.12:运行计划决定部
31.13:行驶控制部
32.14:通信部
33.15:移动指令数据生成部
34.21:行驶道路信息数据库(db)
35.22:基准区域db
36.23:行驶道路网络信息db
37.24:移动体信息db
38.25:运行信息db
39.26:运行计划db
40.51:通信部
41.52:命令执行部
42.53:通过确认部
43.54:通过通知部
44.55:行驶控制部
45.57:通行权处理部
46.201__1~201__3:移动体
47.100:运行计划装置
48.300:计算机装置
49.301:cpu
50.302:输入接口
51.303:显示装置
52.304:通信装置
53.305:主存储装置
54.306:外部存储装置
具体实施方式
55.在一般的运行计划系统中,大多是将在轨道或者运输带(tape)那样的直达道的单轨行驶的指导(guideline)系统的移动体作为对象来制作运行计划。在以专用的方式使用直达道的单轨的情况下,产生干扰的情况少,能够使移动体大致准确地以如计划那样的定时来进行行驶。
56.另一方面,自主移动系统的移动体一边在比较大的区域中自由地行驶并确定自己的位置,一边找到最适当的活动线(活动路线)来进行行驶。作为自主移动系统的移动体的例子,具有在工厂内搬运货物的无人搬送车(agv:automatic guided vehicle,自动导引车)等。在自主移动系统的移动体的行驶道路中,有时也会有人步行、横穿,移动体有时具备对突然出现在行驶道路的人进行识别并停止的功能。另外,移动体有时具有一边对放置于行驶道路上的障碍物进行识别并进行躲避、一边进行行驶的功能。
57.这样,自主移动系统的移动体能够进行具有灵活性的行驶,相反地,在行驶环境中干扰多,因此,有时会难以按照所计划的定时进行行驶。例如,当移动体一边躲避障碍物、一边行驶时,会无法按照所计划的定时来行驶。
58.当移动体的定时偏离计划时,会在移动体间产生竞争。例如,有时移动体彼此会碰撞或者追尾。另外,有时会产生移动体无法在任意的地方(例如行驶道路的交叉部或者端部)进行移动的僵持。
59.在本实施方式中,在这样将自主移动系统的移动体作为运行计划的制作对象的情况下,也实现避免产生移动体间的竞争。但是,本实施方式中作为对象的移动体不限定于自主移动系统的移动体,也可以是指导系统的移动体。以下,参照附图对本实施方式进行详细的说明。
60.图1表示本实施方式涉及的具备运行计划装置(行驶控制装置)和移动体的运行系统的框图。运行计划装置100具备假想区域设定部(区域设定部)11、运行计划决定部12、行驶控制部13、通信部14、移动指令数据生成部15、行驶道路信息数据库(db)21、基准区域db22、行驶道路网络信息db23、移动体信息db24、运行信息db25、运行计划db26以及假想区域db27。移动体201__1~201__n具备通信部51、命令执行部52、通过确认部53、通过通知部54以及通过确认部55。
61.运行计划装置100在多个移动体201__1~201__n在行驶区(行驶道路网络)中进行自主行驶的情况下,制作用于对运行进行控制的运行计划,以使得在这些多个移动体不发生碰撞或者僵持等的竞争,行驶区作为一个例子为自由平面。多个移动体201__1~201__n是agv、自主型的移动机器人、自动行驶的车辆(例如自动行驶车)等的能够自主移动的移动体。
62.多个移动体201__1~201__n例如在工厂内、仓库内、设施用地内等的行驶区(行驶道路网络)中进行行驶。作为一个例子,多个移动体201__1~201__n搭载蓄电池(电池),使用蓄积于电池的电力来进行移动等的动作。
63.图2是示意性地表示了在行驶道路网络中对多个移动体的运行进行控制的状况的俯视图。对于行驶道路网络设定有成为基准的多个区域(基准区域)a、b、c、d、e、f、g、h。基准区域间是移动体能够行驶的通路(行驶道路)。行驶道路网络(行驶区)这样包括多个基准区域和多个基准区域间的多个行驶道路。基准区域例如对应于行驶道路的交叉部(交叉部)、
行驶道路的端部等的任意地方。对于基准区域f、g配置有搬入口,对于基准区域a、e、h配置有架子。基准区域b对应于多条行驶道路的交叉部。
64.在此,基准区域既可以是特定的位置,也可以是具有某范围的区域。例如在通过xy平面表示了行驶道路网络的情况下,基准区域由xy坐标来确定。在考虑高度的情况下,基准区域由xyz坐标来确定。或者,也可以由多个xy坐标的组来确定。例如在基准区域为矩形的情况下,也可以由对角顶点的xy坐标的组来确定。以下,设想基准区域由xy坐标来确定的情况。
65.多个基准区域以与行驶道路网络的地图数据上的坐标相关联的形式被作为基准节点来进行管理。为了便于说明,通过相同的标号对基准节点和基准区域进行表示。对将基准区域之间连结而得到的线(弧线)进行管理来作为移动体所行驶的假想行驶道路。基准节点和假想行驶道路预先被作为数据进行保存。图的实线和虚线是将基准节点之间连结的线(对应于假想行驶道路)。在2台以上的移动体能够在基准节点之间并行(并驶)的情况下,基准节点间也可以用2条以上的线来连结。基准节点和假想行驶道路的数据被定义在地图数据上。地图数据既可以是预先作为cad(computer-aided design,计算机辅助设计)等的图所定义的数据,在移动体具有通过自位置检测功能制作环境地图的功能的情况下,也可以是通过该功能来制作的环境地图。此外,假想行驶道路的形状既可以是直线,也可以是曲线,又可以是直线和曲线的组合。
66.移动体1、2、3对应于图1的移动体201__1~201__3。移动体1~3具备自主行驶功能。更详细而言,移动体1~3具备如下功能:移动体自身生成在基准区域间的行驶道路上行驶的活动线,沿着所生成的活动线以自主的方式进行行驶。作为一个例子,在从基准区域b向基准区域c移动的情况下,若在基准区域b与基准区域c之间不存在障碍物等,则生成将基准区域b的位置和基准区域c的位置连结而得到的线段来作为活动线,沿着该活动线在行驶道路上以自主的方式进行行驶。移动体所生成的活动线既可以与基准节点b和基准节点c之间的假想行驶道路一致,也可以不一致。移动体也可以具备如下功能:将假想行驶道路作为在两个基准节点间移动时的推荐路径来进行行驶,在假想行驶道路上发现了暂时性的障碍物的情况下,对障碍物进行躲避。
67.此外,也可以将具有移动体躲避障碍物来行驶的余裕的行驶道路作为移动体彼此不产生竞争的行驶道路来进行处理。例如,在图2中,在行驶道路be(基准区域b与基准区域e之间的行驶道路。以下是同样的)、行驶道路ba、行驶道路bh等的行驶道路中,例如存在足够的进行相互躲避的程度的余裕,因此,即使2台移动体在彼此相向的方向上行驶,也不产生竞争。例如,一方的移动体在行驶道路的旁边待机,另一方的移动体沿着活动线在行驶道路上移动。另一方的移动体结束了通过后,一方的移动体重新开始移动。另一方面,在行驶道路bc中,没有进行相互躲避的程度的余裕,因此,当在该行驶道路上2台移动体在彼此相向的方向上行驶时,会产生碰撞等的竞争。
68.此外,移动体能够向前方向、后方向或者前后两方向移动。移动体也可以能够进行旋转以使得前后反转。另外,移动体也可以能够向斜方向等前后以外的方向移动。
69.也可以在基准区域、行驶道路、架子、搬入口、其他任意的地方配置检测移动体的状态的传感器、与移动体进行通信的通信装置或者这两方。在该情况下,传感器以有线或者无线的方式与通信装置和运行计划装置100中的至少一方连接。
70.移动体在图1的运行计划装置100的管理下,在行驶道路网络上按照所分配的运行来进行行驶。例如,将从搬入口接受到的货物运到其他搬入口。在移动的途中,有时也进行在架子卸下货物、堆积货物等的作业。各移动体通过执行从运行计划装置100提供的移动指令数据所包含的命令组来进行这样的作业。此外,移动体有时也会不进行货物的搬送,而是只进行移动。
71.在此,对碰撞和僵持进行说明。
72.图3的(a)表示碰撞的例子。图3的(b)表示僵持的例子。在图3的(a)和图3的(b)中,为了便于说明,由直线表示行驶道路。在图3的(a)中,两个移动体在与交叉部相连的两个行驶道路上朝向交叉部行驶,同时到达交叉部,相互碰撞。在图3的(b)中,两个移动体在同一行驶道路上相互向相反方向行驶。当两个移动体设为仅能够前进时,两个移动体不能向原来的方向返回,因此,不能够在任意的区域(交叉部或者端部等)进行移动,会产生僵持。
73.移动体的竞争不限定于碰撞或者僵持。例如,也可以是在1台以上移动体待机于与行驶道路相连的交叉部的状态下,其他移动体在该行驶道路上行驶。
74.图1的运行计划装置100不会使各移动体产生竞争,实现高效地进行各移动体的运行。
75.行驶道路网络信息db23在内部存储有行驶道路网络的构造信息。行驶道路网络的构造信息包括与行驶区的地图数据关联地配置的基准节点和假想行驶道路(弧线)。基准节点对应于基准区域。作为一个例子,基准区域被设定在多个行驶道路的交叉部或者行驶道路的端部等。但是,基准区域可以设定在行驶道路上的任意地方。作为任意地方的例子,包括货物的堆积/卸下场所、待机场所等。
76.图4表示行驶道路网络的简单的例子。图5表示图4的行驶道路网络的构造信息的例子。图4的行驶道路网络包括5个基准区域和4条行驶道路。在此,为了便于说明,由直线表示行驶道路。基准区域na是4条行驶道路交叉的交叉部,基准区域pa、pb、pc、pd是4条行驶道路的端部。在基准区域pb、pd配置有架子,在基准区域pa、pc存在搬入口。作为一个例子,基准区域pa、pb、pc、pd也可以为移动体的出发地点或者到达地点。
77.在图5中,通过将基准节点间结合(或者连接)的直线表示假想行驶道路。各圆表示基准节点(基准区域),将圆之间相连的直线表示弧线(假想行驶道路)。对基准节点标记了与基准区域相同的标号。
78.行驶道路信息db21存储行驶道路网络的构造信息中的各弧线(假想行驶道路)的信息和基准节点的信息来作为行驶道路信息。行驶道路信息包括弧线id(行驶道路id)和弧线两端的节点的id(即行驶道路两端的区域的id)。
79.图6的(a)表示各弧线(假想行驶道路)的信息的例子。在图6的(a)中,例如,基准节点pa、na之间的弧线id为1,该弧线两端的基准节点为pa和na。也可以与弧线id关联地存储基准节点间的距离(行驶道路的距离)。或者,也可以基于弧线两侧的基准节点的位置来计算行驶道路的距离。另外,也可以存储行驶道路的宽度/高度/材质/摩擦系数/坡度等的与行驶道路的构造/配置有关的信息。
80.另外,基准区域db22存储行驶道路网络的构造信息中的各基准节点的信息。例如,作为基准节点的信息,存储有基准节点id、x坐标、y坐标。基准节点的位置例如对应于基准节点所对应的基准区域的位置(坐标)。
81.图6的(b)表示基准节点的信息的一个例子。例如,基准节点pb的坐标是(x,y)=(20,20)。也即是,与基准节点pb对应的基准区域的位置为(x,y)=(20,20)。另外,基准节点na的位置为(x,y)=(20,60)。也即是,与基准节点na对应的基准区域na的位置为(x,y)=(20,60)。
82.假想区域设定部11对于设定于行驶道路网络的基准区域,在至少一条行驶道路设定假想区域。假想区域是用于对移动体的通过顺序进行管理的区域。在此,在与基准区域结合(或者连接)的各行驶道路中,设定在离开了基准区域的位置。即,在行驶道路网络的构造信息中,在与基准节点结合的各弧线上,在离开了基准节点的位置设定假想节点。既可以对于行驶道路网络中的全部基准区域设定假想区域,也可以仅对于与交叉部对应的基准区域、与行驶道路的端部对应的基准区域或者这两方等的特定的基准区域设定假想区域。对于假想区域的设定,也可以由作为本装置100的操作员的用户使用输入装置来指定。在此,对如下情况进行说明,该情况为:对与交叉部对应的基准区域设定假想区域。
83.图7表示对与图4的行驶道路网络的基准区域(交叉部)na结合了的各行驶道路设定了假想区域的例子。在该例子中,在与交叉部na结合了的各行驶道路中,在从交叉部na离开了一定距离的位置设定了假想区域ia、ib、ic、id。
84.假想区域db27存储通过假想区域设定部11设定的假想区域的信息。具体而言,假想区域db27将表示假想区域的假想节点与基准节点和假想行驶道路(弧线)相关联地进行存储。
85.图8表示假想区域db27的一个例子。在此,图7的假想区域(假想节点)ia相对于基准区域(基准节点)na而设定于行驶道路(id为1的弧线)。假想区域ia的xy坐标为(15,60)。
86.图9表示对图7的例子的行驶道路网络的构造信息设定了假想节点的例子。在与基准节点na结合(或者连接)的各弧线上,在从基准节点na离开了一定距离的位置设定有假想节点ia、ib、ic、id。此外,对假想节点标记与该假想节点所对应的假想区域相同的标号。也能够对于基准节点pa~pd也设定假想节点。在该情况下,例如在与基准节点pa~pd结合的各弧线中,在从基准节点pa~pd离开了一定距离的位置设定假想节点即可。
87.图10是假想区域设定部11的动作的一个例子的流程图。在该例子中,在假想行驶道路为直线的情况下,在从基准节点离开了一定距离的位置设定假想节点。
88.在步骤s101中,确定成为设定假想节点的对象的基准节点,确定所确定的基准节点的坐标(xn,yn)。成为设定假想节点的对象的基准节点既可以是特定的基准节点(例如与交叉部对应的基准节点),也可以是全部基准节点,又可以由用户进行指定。另外,确定与所确定的基准节点结合的各弧线(假想行驶道路)的方向(θ)和基准节点与假想节点的距离(l)。
89.从基准区域db22取得基准节点的坐标。从行驶道路信息db21取得假想行驶道路的方向θ。距离l是预先决定的值。距离l也可以根据与假想行驶道路对应的行驶道路的构造/配置等来决定。另外,也可以根据移动体的特性(大小等)来决定距离l。在该情况下,也可以按每个移动体设定假想节点。此外,有时也会从一定的值范围内随机地决定距离l。
90.在步骤s102中,算出从基准节点到假想节点的x方向上的距离xl和y方向上的距离yl。xl=lcosθ、yl=lsinθ。
91.在步骤s103中,算出假想节点的坐标。假想节点的坐标通过(xn+xl、yn+y1)来算
出。
92.移动体信息db24保存一个以上的移动体的信息。例如,保存移动体的位置信息。作为一个例子,移动体的位置信息是实时的位置信息(最新的位置信息)。例如,也可以按每一定时间来从移动体接收包含位置信息的数据,从所接收到的数据取得移动体的位置信息。或者,也可以在设置于行驶道路网络的传感器检测到移动体的通过的情况下,从与传感器连接的通信装置接收对移动体的通过进行通知的数据。移动体的位置信息也可以是尚未被分配运行的待机中的移动体的位置信息。在该情况下,也可以通过从与设置于待机中的移动体或者待机场所的传感器连接的通信装置接收包含位置信息的数据,掌握移动体的待机位置。通信部14进行包含位置信息的数据的接收。位置信息也可以是移动体到此为止所通过的位置的历史记录信息。作为位置信息以外的例子,可以具有移动体所搭载的电池的剩余电力、移动体是否保持有货物(移动体搬送货物的情况)、搬送中的货物的种类和/或数量等。作为移动体的固有的信息,例如包括标准速度、最大速度、最低速度、移动体的尺寸、能够移动的方向等的移动体的规格信息。
93.若是以物的搬送为目的的移动体,则包括货物的装卸所需要的作业时间的信息(例如堆积或者卸下预定个数的货物所需要的时间)。在此所举出的信息不过是一个例子,也可以是其他信息。
94.运行信息db25保存:表示应该分配给一个以上的移动体的运行的运行信息。运行信息包括出发地点和到达地点的信息。运行信息在出发地点和到达地点之外也可以包括移动体应该进行的作业的内容和作业的顺序。对于运行信息,既可以由用户使用输入装置来输入,也可以从外部的装置通过有线或者无线的通信来取得。
95.图11表示运行信息的一个例子。图11的运行信息设想了图4的行驶道路网络。
96.在图11中示出两个运行信息的例子。第1个运行信息包括出发地点pa、到达地点pb。这表示在出发地点pa出发来移动至到达地点pb。第2个运行信息包括出发地点pc、到达地点pd。这表示在出发地点pc出发来移动至到达地点pd。
97.运行计划决定部12决定应该分配运行信息db25内的各运行信息的移动体,对所决定的移动体分配运行信息表示的运行。运行计划决定部12对于被分配了运行的移动体,基于分配给该移动体的运行和移动体信息db24中的移动体的信息来制作行驶计划。行驶计划包括所通过的基准区域的顺序(行驶路线)、和在基准区域出发或者通过的定时(行驶定时)。作为一个例子,行驶定时由运行计划装置100所具备的时钟的时刻来确定。
98.各移动体的行驶路线和行驶定时被决定为使得在移动体间不产生竞争。即,若各移动体以该行驶定时在行驶路线上行驶,则不产生竞争。作为行驶计划的制作方法,可以使用任意的方法。
99.例如也可以通过模拟对各移动体的所有移动模式进行搜索,由此决定不产生竞争的行驶路线和行驶定时。此时,也可以使用标准速度来作为移动体的移动速度。标准速度也可以根据移动体的特性、行驶道路的特性(例如行驶道路的材质等)、行驶道路的坡度等来决定。此时,也可以定义竞争条件来作为有可能产生竞争的条件,对不满足竞争条件的移动模式进行搜索。作为竞争条件的例子存在如下状况:2台以上的移动体在相同的行驶道路上同时地在相同的方向或者相反的方向上行驶。
100.或者,也可以先决定各移动体的行驶路线,然后,决定行驶路线所包含的各基准区
域的出发时刻(通过时刻)以使得在移动体间不产生竞争。行驶路线也可以是从出发地点到目的地点为止的移动距离或者移动时间成为最短的路线。此时,也可以决定各基准区域的出发时刻(通过时刻)以使得不满足竞争条件。
101.也可以使用上述以外的方法来制作行驶计划。
102.运行计划决定部12确定2个以上的移动体的行驶路线所共同包含的基准区域。从所确定的基准区域中,将对移动体的通过顺序进行管理的区域决定为指定区域(通过管理区域)。将与指定区域对应的基准节点称为指定节点。指定区域既有时为1个,也有时为2个以上。指定区域既可以是所确定的基准区域的全部,也可以是一部分。也可以由用户选择指定区域。运行计划决定部12将指定节点的信息保存于运行计划db26或者运行计划决定部12的内部缓存等。作为一个例子,基准区域或者指定区域对应于第1区域,作为一个例子,假想区域对应于第2区域、第3区域、第4区域。
103.运行计划决定部12按每个指定区域(指定节点)决定各移动体的通过顺序。例如,基于行驶计划来在移动体之间对该指定区域的出发时刻进行比较,以出发时刻越早则顺序越早的方式决定移动体在该指定区域中的通过顺序。生成对移动体需要以所决定的通过顺序来通过这一制约、即指定区域中的通过顺序的制约进行了表示的信息。将该信息称为通过顺序信息。
104.运行计划决定部12可以将各移动体的行驶计划所包含的行驶路线的信息(行驶路线信息)和通过顺序信息作为运行计划。
105.运行计划db26将通过运行计划决定部12制作的运行计划(各移动体的行驶路线的信息和通过顺序信息)保存于内部。
106.以下,表示运行计划决定部12的动作的具体例。首先,对agv0分配图11的第1个运行,对agv1分配图11的第2个运行,制作agv0和agv1的行驶计划。
107.图12的(a)表示agv0和agv1的行驶计划的一个例子。agv0的行驶路线为pa、na、pb,pa、na、pb的出发时刻为0、10、20。也即是,在时刻0在地点pa出发,在时刻10在交叉部na通过(出发),在时刻20到达地点pb。agv1的行驶路线为pc、na、pd,pc、na、pd的出发时刻为10、20、30。也即是,在时刻10在地点pc出发,在时刻20在交叉部na通过(出发),在时刻30到达地点pd。地点pa~pd和交叉部na均为基准区域。
108.agv0和agv1都通过交叉部na。因此,运行计划决定部12将na确定为指定区域。
109.另外,na处的agv0的出发时刻为10,na处的agv1的出发时刻为20。即,作为交叉部na的通过顺序,agv0先通过,agv1接着通过。由此,运行计划决定部12生成包含按agv0、agv1的顺序通过na这一制约的通过顺序信息。
110.运行计划决定部12可以将所制作的行驶计划所包含的行驶路线的信息和所制作的通过顺序信息作为运行计划。
111.图12的(b)中表示通过运行计划决定部12得到的运行计划的例子。agv0的行驶路线为pa、na、pb,agv1的行驶路线为pc、na、pd。在通过顺序信息中,指定区域为交叉部na,作为交叉部na的通过顺序,agv0先通过、agv1接着通过被确定为通过顺序。
112.图13表示在图4所示的行驶道路网络中agv0、agv1分别配置在运行计划所表示的出发地点pa、pc的状态。在图13中,为了便于说明,由直线表示行驶道路。此外,在制作运行计划前,agv0、agv1存在于出发地点pa、pc,运行计划决定部12使用agv0、agv1存在于地点
pa、pc这一信息,对agv0、agv1分配运行信息。但是,也可以在对agv0、agv1分配了运行之后,将agv0、agv1配置在地点pa、pc。
113.移动指令数据生成部15基于运行计划db26中的移动体的运行计划(行驶路线信息、通过顺序信息)和通过假想区域设定部11设定的假想区域,来生成移动体的移动指令数据。即,移动指令数据生成部15取得移动体的行驶路线和通过顺序信息,确定在移动体在行驶路线所包含的指定区域之前行驶的行驶道路上所设定的假想区域,基于所设定的假想区域和通过顺序信息,生成移动体的移动指令数据。移动指令数据包含对于移动体的多个命令。通过移动体按顺序执行移动指令数据所包含的多个命令,进行分配给移动体的运行。移动指令数据被生成为使得多个移动体在指定区域不进行竞争。通过移动体执行移动指令数据,假想区域和指定区域中的行驶定时被进行调整,能防止指定区域中的竞争。以下,对详细情况进行说明。
114.移动指令数据生成部15基于运行计划来取得移动体的行驶路线。对于行驶路线所包含的多个基准节点(基准区域),分别生成1个以上的命令。
115.在本实施方式中,行驶路线中的最先的基准区域对应于移动体的出发地点(开始位置)。对于该最先的基准区域,生成向出发地点的移动命令(此外,在移动体已经位于出发地点的情况下,即使执行移动命令,移动体也不移动)。
116.行驶路线的最后的基准区域对应于移动体的到达地点(结束位置)。对于最后的基准区域,生成向到达地点的移动命令。
117.关于最先的基准区域和最后的基准区域以外的基准区域,对该基准区域是否为指定区域进行判断。在不是指定区域的情况下,生成与该基准区域对应的向基准区域的移动命令。
118.在基准区域为指定区域的情况下(在此设为基准区域n为指定区域),确定在基准区域n之前所结合的行驶道路。具体而言,确定在与基准区域对应的基准节点之前所结合的假想行驶道路,确定与该假想行驶道路对应的行驶道路。确定在所确定的行驶道路中对基准区域n所设定的假想区域(记载为假想区域a)。另外,在行驶路线中,确定在基准区域n之后所结合的行驶道路,确定在所确定的行驶道路中对该基准区域n所设定的假想区域(设为假想区域b)。
119.并且,生成向假想区域a移动的命令(第1命令)、确认是否被允许通过基准区域n的命令(第2命令)、在被允许了通过基准区域n的情况下向假想区域b移动的命令(第3命令)、向本装置100发送表示向假想区域b移动了之后通过了基准区域n这一情况的信息的命令(第4命令)。第2命令也可以说是确认是否被允许在假想区域a出发或者通过的命令,第3命令也可以说是在假想区域a出发或者通过的命令。这样对1个基准区域n生成4个命令。
120.行驶控制部13通过将对于行驶路线所包含的多个基准区域分别生成的命令以这多个基准区域的配置顺序来进行配置,生成移动指令数据。
121.移动指令数据生成部15经由通信部14向移动体发送对该移动体所生成的移动指令数据。
122.对被制作了运行计划的全部移动体进行以上的动作。
123.也可以附加移动指令数据所包含的最先的命令的执行开始时刻。最先的命令的执行开始时刻也可以与行驶计划中的最先的基准区域的出发时刻相同。在行驶计划或者行驶
路线包含移动体进行的作业的情况下,与该作业对应的命令也被追加于移动指令数据。作为作业的例子,包括从搬入口接受货物、将所接受的货物运到架子、向架子堆积货物等。另外,也有时从架子卸下货物等。
124.图14表示在图12的运行计划(行驶路线信息、通过顺序信息)和图7的行驶道路网络的例子中对agv0和agv1所生成的移动指令数据的例子。以下,具体地表示生成agv0和agv1的移动指令数据的步骤。
125.在agv0的行驶路线中,最先的基准区域pa对应于出发地点,因此,生成向地点pa移动的命令。图14的“pa”意味着向pa移动的命令。命令的记载可以是任意的,例如也可以将向pa移动的命令设为move__pa等。此外,在本例子中,agv0已经存在于出发地点,因此,设为即使执行该命令也不会实际地进行移动。因此,也可以省略向pa移动的命令的生成。
126.在agv0的行驶路线中,第2个区域na是由通过顺序信息确定了通过顺序的区域。因此,在agv0的行驶路线中,确定在紧接着区域na之前所行驶的行驶道路。确定在所确定的行驶道路中对区域na设定的假想区域ia。作为具体的处理,确定紧接着基准节点na之前所行驶的假想行驶道路,在所确定的假想行驶道路中确定对于基准节点na的假想节点ia。
127.另外,在agv0的行驶路线中,确定紧接着区域na之后所行驶的行驶道路。确定在所确定的行驶道路中对区域na设定的假想区域ib。作为具体的处理,确定紧接着基准节点na之后所行驶的假想行驶道路,在所确定的假想行驶道路中确定对于基准节点na的假想节点ib。
128.由此,生成:
129.向假想区域ia移动的命令“ia”、
130.对是否被允许通过指定区域na(在假想区域ia出发或者通过)进行确认的命令“check(na)”、
131.在被允许通过指定区域na的情况下向假想区域ib移动(在假想区域ia出发或者通过)的命令“ib”、
132.在向假想区域ib移动了之后向本装置100发送表示通过了指定区域na(到达了假想区域ib)这一情况的信息的命令“notice(na)”。
133.check(na)相当于进行对于指定区域na的通过确认的命令(通过确认命令),notice(na)相当于进行指定区域na的通过完成通知的命令(通过通知命令)。
134.此外,agv0设为:在通过执行check(na)而被从行驶控制部13允许通过区域(指定节点)na之前,无法向比假想区域ia靠前的位置行进。例如agv0在得到通过区域na的允许之前到达了假想区域ia的情况下,在假想区域ia暂时停止。另一方面,agv0在假想区域ib中在到达了假想区域ib的时间点执行notice(na),不需要在假想区域ib暂时停止。
135.在agv0的行驶路线中,第3个区域pb为到达地点,因此,生成向到达地点pb移动的命令“pd”。
136.通过与行驶路线所包含的基准区域的顺序对应地配置如上所述那样生成的命令,对agv0生成图14所示的移动指令数据。在agv1的情况下,也能够与agv0同样地生成移动指令数据。行驶控制部13经由通信部14向agv0和agv1发送对agv0和agv1生成的移动指令数据。
137.行驶控制部13在从移动体接收到对于指定区域(基准区域)的通过确认的询问数
据的情况下,对该指定区域的通过顺序信息进行确认。在已从顺序比询问源的移动体早的全部移动体接收到该指定区域的通过完成通知或者询问源的移动体为第1个的最先的顺序的情况下,向询问源的移动体发送允许通过指定区域的允许通知(允许在假想区域出发或者通过的允许通知)。在除了这些之外时,向询问源的移动体发送不允许通过指定区域的非允许通知。运行计划装置100也可以反复发送非允许通知,直到允许通过指定区域。另外,行驶控制部13在从移动体接收到对于指定区域的通过完成通知的情况下,将通过完成通知所表示的指定区域与通过完成通知的发送源的移动体相关联地保存于运行计划db26或者内部的缓存等。
138.通信部14与移动体的通信部51进行无线或者有线的通信。通信的方式可以是任意的。既可以定义专用的协议,也可以是由ieee802.11确定的无线lan(local area network,局域网)协议。
139.移动体的通信部51与运行计划装置100的通信部14进行无线或者有线的通信。通信的方式可以如上述那样是任意的。
140.移动体的行驶控制部55使用命令执行部52、通过确认部53以及通过通知部54对移动体的行驶进行控制。行驶控制部55在移动体通过假想区域之前,基于与行驶控制装置的通信,对能否通过指定区域进行确认,该假想区域在移动体的行驶路线中设定于在指定区域之前所行驶的行驶道路。行驶控制部55进行控制以使得:在能够通过指定区域的情况下,移动体通过假想区域,在不能通过指定区域的情况下,不通过假想区域(例如在假想区域停止),直到能够确认到能通过指定区域。行驶控制部55经由通信部51从运行计划装置100取得移动指令数据。
141.命令执行部52通过按次序执行移动指令数据所包含的命令,从出发地点沿着行驶路线行驶至到达地点。移动体在对最先的命令附加了时刻的情况下,在成为了该时刻的时间点开始执行命令。在未附加时刻的情况下,从接收到移动指令数据起立刻或者一定时间后开始命令的执行。也可以通过在此记载的方法以外的方法来决定执行最先的命令的定时。
142.命令执行部52在命令为向基准区域或者假想区域的移动命令时,向由命令指定的基准区域或者假想区域移动。在命令为对于指定区域的通过确认命令时,使用通过确认部53,对运行计划装置100进行通过确认的询问。
143.通过确认部53向运行计划装置100发送对于指定区域的通过是否被允许的询问数据(通过确认的询问数据)。通过确认部53在接收到通过的允许通知的情况下,向命令执行部52提供表示允许通过的数据或者信号。命令执行部52在接收到允许通过的数据或者信号的情况下执行接下来的命令。即,在指定区域的跟前的假想区域(即当前暂时停止或者当前驶向的假想区域)出发。在向接下来的区域(假想区域或者基准区域)移动的途中,通过指定区域。另一方面,通过确认部53在从运行计划装置100接收到通过的非允许通知的情况下或者未接收到任何响应的情况下,进行待机直到得到通过的允许通知,或者,按每一定时间反复发送允许通过的询问数据。或者,运行计划装置100也可以反复发送非允许通知直到允许通过。
144.命令执行部52在命令为对于指定区域的通过通知命令时,使用通过通知部54对运行计划装置100进行通过完成通知。通过通知部54向运行计划装置100发送通过了由该命令
指定的指定区域之意的通知。
145.以下,以agv0和agv1为例来对移动体的动作进行说明。
146.agv0接收图14的第1个移动体指令数据,按次序执行所接收到的移动体指令数据所包含的命令。agv1接收图14的第2个移动体指令数据,按次序执行所接收到的移动体指令数据所包含的命令。在此,为了进行说明,设想为接收到移动体指令数据的agv0和agv1同时开始执行命令的情况。
147.[agv0]
[0148]
agv0执行命令pa,但由于已经存在于区域pa,因此,执行接下来的命令ia(或者也可以跳过最先的命令)。agv0通过执行命令ia来向假想区域ia移动。agv0在到达了假想区域ia时或者到达假想区域ia之前,执行命令check(na)。agv0在到达了假想区域ia的时间点尚未得到ia的通过允许的情况下,在假想区域ia暂时停止。agv0通过执行命令check(na),对是否被允许通过区域na进行确认。具体而言,agv0向运行计划装置100发送是否被允许通过区域na(在假想区域ia通过或者出发)的询问数据(通过确认的询问数据)。运行计划装置100的行驶控制部13基于通过顺序信息来对agv0的通过顺序进行确认。agv0的通过顺序为第1个,因此,行驶控制部13向agv0发送允许通过区域na的允许通知(在假想区域ia通过或者出发的允许通知)。agv0被允许了通过区域na(在假想区域ia通过或者出发),因此,执行接下来的命令ib,驶向假想区域ib。在驶向假想区域ib的途中通过区域na。当到达假想区域ib时,执行接下来的命令notice(na),向运行计划装置100发送表示通过了区域na(到达了假想区域ib)这一情况的通过完成通知。agv0接着执行接下来的命令pb,向区域pb移动。若到达了区域pb,则结束动作。例如,agv0等待从运行计划装置100接收接下来的移动指令数据。
[0149]
[agv1]
[0150]
agv1执行命令pc,但由于已经存在于区域pc,因此,执行接下来的命令ic(或者也可以跳过最先的命令)。agv1通过执行命令ic,驶向假想区域ic。agv1在到达了假想区域ic时或者到达假想区域ic之前执行命令check(na)。agv1在到达了假想区域ic的时间点尚未得到ic的通过允许的情况下,在假想区域ic暂时停止。agv1通过执行接下来的命令check(na),对是否被允许通过区域na进行确认。具体而言,agv1向运行计划装置100发送是否被允许通过区域na(在假想区域ic通过或者出发)的询问数据(通过确认的询问数据)。运行计划装置100的行驶控制部13基于通过顺序信息来对agv1的通过顺序进行确认。agv1的通过顺序为第2个,因此,行驶控制部13对第1个agv0是否已通过区域na进行调查。在从agv0接收到区域na的通过完成通知的情况下,判断为agv0已通过区域na。在该情况下,行驶控制部13向agv1发送允许agv1通过区域na之意的允许通知(在假想区域ic通过或者出发的允许通知)。另一方面,行驶控制部13在未从agv0接收到区域na的通过完成通知的情况下,判断为agv0尚未通过区域na,向agv1发送非允许通知,或者,不发送任何响应。agv1在被允许了通过区域na的情况(被允许了在假想区域ia通过或者出发的情况)下,执行接下来的命令id,驶向假想区域id。agv1在从运行计划装置100接收到非允许通知、或者未接收到任何响应的情况下,在假想区域ic保持待机不变的状态,在一定时间后再次发送询问数据。或者,在假想区域ic持续待机,直到从运行计划装置100接收到允许通知。agv1在驶向假想区域id的途中通过区域na。当到达假想区域id时,执行接下来的命令notice(na),向运行计划装置100
发送表示通过了区域na(到达了假想区域ib)这一情况的通过完成通知。agv1执行接下来的命令pd,向区域pd移动。若到达了区域pb,则结束动作。例如,agv1等待从运行计划装置100接收接下来的移动指令数据。
[0151]
图15是运行计划装置100的动作的一个例子的流程图。假想区域设定部11基于存储于行驶道路网络信息db23、基准区域db22以及行驶道路信息db21的信息,对行驶道路网络中的各基准区域设定假想区域。作为具体的处理,对行驶道路网络的构造信息所表示的各基准节点设定假想节点(s11)。
[0152]
运行计划决定部12基于存储于运行信息db25和移动体信息db24的信息,将运行信息所表示的各运行分配给移动体(s12)。基于分配给各移动体的运行,生成各移动体的行驶计划(s13)。作为一个例子,行驶计划包括行驶路线和行驶定时。运行计划决定部12基于各移动体的行驶路线,确定多个移动体共同通过的基准区域(s14)。将所确定的基准区域作为指定区域。决定移动体通过指定区域的顺序(s15)。作为一个例子,基于该指定区域中的多个移动体的行驶定时,按行驶定时从早到晚的顺序,决定移动体的顺序。运行计划决定部12可以将表示各移动体的行驶路线的信息(行驶路线信息)、和表示指定区域的通过顺序的制约的信息(通过顺序信息)作为运行计划(s16)。
[0153]
行驶控制部13基于运行计划中的各移动体的行驶路线信息、和通过假想区域设定部11设定的假想区域的信息,生成各移动体的移动指令数据(s17)。更详细而言,对于行驶路线的最先的基准区域和最后的基准区域,生成向最先的基准区域的移动命令和向最后的基准区域的移动命令。关于最先的基准区域与最后的基准区域之间的基准区域,生成向该基准区域之前的假想区域(设为假想区域a)的移动命令、对于基准区域的通过确认命令、在得到了通过的允许之后向基准区域之后的假想区域(设为假想区域b)的移动命令(在假想区域a出发或者通过的命令)、以及在到达了假想区域b的时间点发送基准区域的通过完成通知的命令。行驶控制部13通过与基准区域的配置顺序对应地配置对于行驶路线所包含的各基准区域所生成的命令,生成移动指令数据。行驶控制部13经由通信部14向各移动体发送所生成的各移动体的移动指令数据(s18)。
[0154]
图16是表示向各移动体发送了移动指令数据之后的动作的一个例子的流程图。
[0155]
行驶控制部13对是否从移动体接收到对于指定区域(基准区域)的通过确认的询问数据进行判断(s21)。在未接收到询问数据的情况下(s21:否),进入步骤s25。在接收到询问数据的情况下(s21:是),对询问数据所表示的指定区域的通过顺序信息进行确认。确定顺序比询问源的移动体早的全部移动体,对是否已从所确定的全部移动体接收到该指定区域的通过完成通知、或者询问源的移动体是否为第1个的最先的顺序进行判断(s22)。在从全部移动体已接收到通过完成通知时、或者询问源的移动体为第1个的最先的顺序时,向询问源的移动体发送允许通过指定区域的允许通知(在假想区域出发或者通过的允许通知)(s23)。在除此以外时,向询问源的移动体发送不允许通过指定区域的非允许通知(s24)。
[0156]
行驶控制部13对是否从移动体接收到对于指定区域的通过完成通知进行判断(s25)。在接收到通过完成通知的情况下(s25:是),将通过完成通知所表示的指定区域与通过完成通知的发送源的移动体相关联地保存于运行计划db26或者内部的缓存等(s26)。在未接收到通过完成通知的情况下(s25:否),进入步骤s21。在行驶控制部13从全部的移动体接收到运行完成的通知的情况下,结束本处理(s27:是)。在存在运行尚未完成的移动体时,
返回到步骤s21。
[0157]
图17是表示接收到移动指令数据的移动体的动作的一个例子的流程图。移动体的命令执行部52从最先开始按次序确定移动指令数据所包含的多个命令。对所确定的命令是否为移动命令进行确认(s31)。在是移动命令时,向由移动命令指定的区域(基准区域或者假想区域)移动(s32)。向该区域移动了之后,判断是否执行了全部的命令(s37)。此外,在移动体位于最先的出发地点(开始地点)的情况下,当最先的命令为向开始地点移动的移动命令时,不需要进行移动。
[0158]
在步骤s37中判断为未执行完全部命令的情况下(否),确定接下来的命令(s38),返回到步骤s31。在执行完全部命令的情况下(是),结束本处理。
[0159]
在所确定的命令不是移动命令的情况下(s31:否),对命令为对于指定区域的通过确认命令和对于指定区域的通过通知命令中的哪个进行判断(s33)。
[0160]
在是通过确认命令的情况下,从通过确认部53向运行计划装置100发送对于指定区域的通过确认的询问数据(s34)。在从运行计划装置100接收到通过的允许通知的情况下(s35:是),进入步骤s38。在未接收到允许通知的情况下(s35:否),进行待机直到接收到允许通知。或者,也可以按每一定时间来反复发送上述的询问数据,直到接收到允许通知。此外,作为未接收到允许通知的方式,存在接收非允许通知的情况或者未接收到任何响应的情况。
[0161]
在所确定的命令为通过通知命令的情况下,从通过通知部54向运行计划装置100发送对于指定区域的通过完成通知(s36)。也可以设为在发送后从运行计划装置100接收确认响应。在该情况下,通过通知部54待机,直到能够接收到确认响应。或者,也可以在即使经过一定时间也未能接收到确认响应的情况下,再次发送通过完成通知。此后,进入步骤s37。
[0162]
在本实施方式中,事先对行驶道路网络中的各基准区域设定了假想区域,但也可以在运行计划制作时将行驶路线所包含的基准区域作为对象来制作假想区域。
[0163]
在本实施方式中,在移动体通过了指定区域之后,在紧接着指定区域之后所通过的假想区域发送了通过完成通知。在本装置100中实时地对移动体的位置信息进行管理的情况下,也能够在本装置100侧对移动体通过指定区域这一情况进行检测。在该情况下,也可以省略从移动体发送通过完成通知(也即是也可以省略第4命令)。
[0164]
在本实施方式中,将假想区域设定在了与指定区域结合的行驶道路,但不限定于此。例如,也可以为:一端侧与指定区域结合的行驶道路的另一端侧与其他的基准区域结合,在与该其他的基准区域结合的其他的行驶道路设定对于指定区域的假想区域。例如在其他的基准区域不需要对移动体的通过顺序进行管理、不将其他的基准区域作为指定区域的情况下也可以这样进行处理。
[0165]
在本实施方式中,对于多个移动体所通过的基准区域(基准节点)生成了通过顺序,但也可以对仅1台移动体所通过的基准区域(基准节点)生成通过顺序。另外,也可以将仅1台移动体所通过的基准区域作为指定区域。
[0166]
以上,根据本实施方式,进行控制以使得:仅在以通过顺序信息决定了要在该移动体之前通过的其他移动体全部通过了指定区域的情况下,该移动体在紧接着指定区域之前的假想区域出发或者通过。由此,能够保证指定区域中的移动体的通过顺序。由此,不管行驶环境的干扰等如何,都能够进行避免了移动体的竞争的运行。
[0167]
(第1变形例)
[0168]
在上述的实施方式中,作为行驶计划,算出了各移动体的行驶路线和行驶路线所包含的各基准区域的出发时刻。作为其他方法,也可以算出多个移动体的行驶路线、和对于在多个移动体的行驶路线中所共同包含的基准区域的移动体的通过顺序,来作为行驶计划。在该情况下,不需要算出各基准区域的出发时刻。能够将对于该基准区域的通过顺序的信息直接用作运行计划的通过顺序信息。
[0169]
(第2变形例)
[0170]
基准区域不仅是交叉部,也可以是装货卸货场所、充电场所、移动体的待机场所等的移动体停止的场所。另外,基准区域也可以是从两车道的路线变为单车道的路线等的道路狭窄的场所。另外,基准区域也可以是行驶道路的坡度变化的地方。另外,基准区域也可以是拐角等的移动体的速度会变化的地方。可考虑通过将会引起移动体彼此的追尾等的场所作为基准区域、对基准区域设定假想区域,从而适当地对通过顺序进行控制。另外,可以将成为移动体的出发地点的场所、成为运行信息的到达地点的场所作为基准区域。另外,也可以将移动体的当前位置作为基准区域。
[0171]
(第2实施方式)
[0172]
在第1实施方式中,通过移动体和运行管理装置100之间进行通信,进行了紧接着指定区域之前的假想区域的出发或者通过的控制(通过确认的询问和通过完成通知的发送)。在本实施方式中,通过移动体彼此相互进行通信,进行紧接着指定区域之前的假想区域的出发或者通过的控制。在本实施方式中导入如下结构:移动体彼此交接通过指定区域的权利(通行权),仅是具有通行权的移动体被允许通过指定区域(在紧接着指定区域之前的假想区域出发或者通过)。以下,对本实施方式进行详细的说明。省略与第1实施方式同样的说明。
[0173]
图18表示第2实施方式涉及的具备运行计划装置(行驶控制装置)和移动体的运行系统的框图。运行计划装置100除了不具备行驶控制部13这一点之外,具有与第1实施方式同样的构成。移动体201_1~201_n具备通行权处理部57,而不具备第1实施方式中的通过确认部53和通过通知部54。移动体201_1~201_n的通信部51与运行计划装置100进行通信,另外,与移动体201_1~201_n中的自身移动体以外的移动体进行通信。移动体间的通信的方式可以为专用协议或者无线lan协议等任意的方式。
[0174]
运行计划装置100的假想区域设定部11和运行计划决定部12的动作与第1实施方式相同。
[0175]
移动指令数据生成部15基于运行计划db26中的移动体的运行计划(行驶路线信息、通过顺序信息)和通过假想区域设定部11设定的假想区域,生成移动体的移动指令数据。与第1实施方式同样地,生成移动指令数据以使得在指定区域中多个移动体不竞争,但所生成的移动指令数据的构成与第1实施方式不同。以下,对详细情况进行说明。
[0176]
移动指令数据生成部15基于运行计划,确定行驶路线所包含的多个基准节点(基准区域)中的指定区域。对于所确定的指定区域,基于通过顺序信息,确定次序最早的移动体。对于所确定的移动体,生成向该移动体自身提供指定区域的通行权的命令(通行权提供命令)。将通行权提供命令表示为sendright(自变量1、自变量2)。自变量1为指定区域的id,自变量2为移动体的id。执行通行权提供命令的移动体对由自变量2指定的移动体提供由自
变量1指定的指定区域的通行权。提供通行权是指发送包含表示通行权的信息的数据。在此,对执行通行权提供命令的移动体自身提供通行权,因此,自变量2中所指定的id为该移动体自身的id。自变量1中所指定的id为上述的所确定的指定区域的id。
[0177]
确定行驶路线中的最先的基准区域。在本实施方式中,最先的基准区域对应于移动体的出发地点(开始位置)。对于该最先的基准区域,与第1实施方式同样地生成向出发地点的移动命令。
[0178]
确定行驶路线的最后的基准区域。最后的基准区域对应于移动体的到达地点(结束位置)。对于最后的基准区域,与第1实施方式同样地生成向到达地点的移动命令。
[0179]
关于最先的基准区域和最后的基准区域以外的基准区域,判断该基准区域是否为指定区域。在不是指定区域的情况下,生成与该基准区域对应的向基准区域的移动命令。
[0180]
在基准区域为指定区域的情况下(在此设基准区域n为指定区域),确定在基准区域n之前所结合的行驶道路。确定在所确定的行驶道路中对基准区域n设定的假想区域(记载为假想区域a)。另外,在行驶路线中,确定在基准区域n之后所结合的行驶道路,确定在所确定的行驶道路中对该基准区域n设定的假想区域(设为假想区域b)。
[0181]
并且,生成向假想区域a移动的命令(第1命令)、对自身移动体是否具有基准区域n的通行权进行确认的命令(通行权确认命令、第2命令)、在具有基准区域n的通行权的情况下向假想区域b移动的命令(第3命令)、在向假想区域b移动了之后将基准区域n的通行权提供给在通过顺序信息中为接下来的次序的移动体的命令(通过提供命令、第4命令)。在不存在接下来的次序的移动体的情况下(自身移动体为最后的次序的情况下),作为通过提供命令的自变量,移动体的id设为null(哪个移动体都不指定)。将通行权确认命令表示为haveright(自变量)。通行权确认命令的自变量为基准区域(指定区域)的id。执行通行权确认命令的移动体对自身移动体是否具有在作为自变量所指定的指定区域通过的通行权(也即是,是否被允许通过指定区域)进行确认。第2命令也可以说是对是否被允许在假想区域a出发或者通过进行确认的命令。第3命令也可以说是在假想区域a出发或者通过的命令。第4命令也可以说是对接下来的次序的移动体允许基准区域n的通过的命令。这样对一个基准区域n生成4个命令。
[0182]
行驶控制部13通过将对行驶路线所包含的多个基准区域分别生成的命令按这多个基准区域的配置顺序进行配置,生成移动指令数据。关于最先通过指定区域的移动体的移动指令数据,在移动指令数据的开头(出发的命令之前)配置该指定区域的通行权提供命令。在某移动体最先通过的指定区域存在多个时,关于多个指定区域,将多个通行权提供命令配置在移动指令数据的开头。此时,多个通行权提供命令的配置顺序可以是任意的。
[0183]
移动指令数据生成部15将对移动体生成的移动指令数据经由通信部14发送给该移动体。
[0184]
对被制作了运行计划的全部移动体进行以上的动作。
[0185]
图19表示在图12的运行计划(行驶路线信息、通过顺序信息)和图7的行驶道路网络的例子中对agv0和agv1生成的移动指令数据的例子。以下,具体地表示生成agv0和agv1的移动指令数据的步骤。
[0186]
在agv0和agv1的行驶路线中确定指定区域na。根据通过顺序信息,指定区域na的通过次序最早的移动体为agv0。由此,对agv0生成向agv0提供指定区域na的通行权的命令
(通行权提供命令)sendright(na,agv0)。在agv0和agv1的行驶路线中,除了na以外不存在指定区域。
[0187]
在agv0的行驶路线中,最先的基准区域pa对应于出发地点,因此,生成向地点pa移动的命令。
[0188]
在agv0的行驶路线中,第2个区域na为由通过顺序信息决定了通过顺序的指定区域。因此,在agv0的行驶路线中,确定紧接着区域na之前所行驶的行驶道路。确定在所确定的行驶道路中对区域na设定的假想区域ia。
[0189]
另外,在agv0的行驶路线中确定紧接着区域na之后所行驶的行驶道路。确定在所确定的行驶道路中对区域na所设定的假想区域ib。
[0190]
由此,生成:
[0191]
向假想区域ia移动的命令“ia”、
[0192]
对指定区域na的通行权进行确认(确认是否被允许在假想区域ia出发或通过)的命令“haveright(na)”、
[0193]
在具有指定区域na的通行权的情况下向假想区域ib移动(在假想区域ia出发或者通过)的命令“ib”、
[0194]
在向假想区域ib移动了之后将指定区域na的通行权提供给接下来的次序的移动体(agv1)的命令sendright(na,agv1)。
[0195]
在agv0的行驶路线中,第3个区域pb是到达地点,因此,生成向到达地点pb移动的命令“pd”。
[0196]
通过与行驶路线所包含的基准区域的次序对应地配置如上所述生成的命令,并且,将sendright(na,agv0)配置在开头,对agv0生成图19所示的移动指令数据。此外,将sendright(na,agv0)配置在开头是一个例子,只要是在对由sendright指定的指定区域的通行权进行确认的命令haveright(na)之前,则可以配置在任何位置。
[0197]
在agv1的情况下,能够与agv0同样地生成移动指令数据。
[0198]
具体而言,在agv1的行驶路线中,最先的基准区域pc对应于出发地点,因此,生成向地点pc移动的命令。
[0199]
在agv1的行驶路线中,第2个区域na是由通过顺序信息决定了通过顺序的指定区域。因此,在agv1的行驶路线中,确定紧接着区域na之前所行驶的行驶道路。确定在所确定的行驶道路中对区域na设定的假想区域ic。
[0200]
另外,在agv0的行驶路线中确定紧接着区域na之后所行驶的行驶道路。确定在所确定的行驶道路中对区域na设定的假想区域id。
[0201]
由此,生成:
[0202]
向假想区域ic移动的命令“ic”、
[0203]
对指定区域na的通行权进行确认(确认是否被允许在假想区域ic出发或者通过)的命令“haveright(na)”、
[0204]
在具有指定区域na的通行权的情况下向假想区域id移动(在假想区域ic出发或者通过)的命令“id”、
[0205]
在向假想区域ic移动了之后将指定区域na的通行权提供给接下来的次序的移动体的命令sendright(na,null)。由于不存在接下来的次序的移动体,因此,sendright的自
变量2被设为null。
[0206]
此外,agv1设为在通过执行haveright(na)来对具有指定区域na的通行权这一情况进行确认之前,无法向比假想区域ic靠前的位置行进。例如,agv1在取得区域na的通行权之前到达了假想区域ic的情况下,在假想区域ic暂时停止。另一方面,在假想区域id中,agv1在到达了假想区域id的时间点执行sendright(na,null),不需要在假想区域id暂时停止。
[0207]
行驶控制部13将对agv0和agv1生成的移动指令数据经由通信部14发送给agv0和agv1。
[0208]
移动体的行驶控制部55使用命令执行部52、通行权处理部57来对移动体的行驶进行控制。移动体的行驶控制部55在移动体通过在移动体的行驶路线中设定于在指定区域之前所行驶的行驶道路的假想区域之前,基于与其他移动体的通信来确认是否能够通过指定区域。行驶控制部55进行控制,以使得:在能够通过指定区域的情况下,移动体通过假想区域,在不能通过指定区域的情况下,不通过假想区域(例如在假想区域停止),直到能够确认到能通过指定区域。行驶控制部55经由通信部51从运行计划装置100取得移动指令数据。
[0209]
命令执行部52通过按次序执行移动指令数据所包含的命令,从出发地点沿着行驶路线行驶至到达地点。
[0210]
命令执行部52在命令为向基准区域或者假想区域的移动命令时,向由移动命令指定的基准区域或者假想区域移动。
[0211]
命令执行部52在命令为通行权提供命令时,使用通行权处理部57,进行向由通行权提供命令指定的移动体提供由通行权提供命令指定的指定区域的通行权的处理。
[0212]
例如,使用包括目标字段和通知字段的帧,该通知字段保存成为通行权的提供对象的指定区域的id。通行权处理部57在帧的目标字段保存该被指定的移动体的id(地址等)、并在通知字段保存成为通行权的提供对象的指定区域的id来生成帧。经由通信部51对所生成的帧进行发送。由此,能够向由目标地址指定的移动体提供由指定区域字段指定的指定区域的通行权。也可以设为从目标的移动体接收帧的响应确认。也可以在未接收到响应确认的情况下,以一定时间间隔进行帧的再发送。由此,能够提高通行权提供的可靠性。
[0213]
通行权处理部57在从其他移动体接收到帧的情况下,对目标是否为自身移动体进行确认。在为自身移动体时,从通知字段读出指定区域的id。掌握自身移动体取得了该指定区域的通行权这一情况。通行权处理部57既可以将自身移动体具有通行权的指定区域的信息保存于通行权处理部57的内部缓存,通行权处理部57也可以将其保存于能够进行访问的存储部。存储部既可以配置在移动体的内部,也可以配置在能够通过有线或者无线的通信进行访问的外部装置。
[0214]
命令执行部52在命令为通行权确认命令时,使用通行权处理部57,进行对自身移动体是否具有由通行权提供命令指定的指定区域的通行权进行确认的处理。在具有通行权的情况下,执行接下来的命令。即,在指定区域的跟前的假想区域(即当前暂时停止或者当前驶向的假想区域)出发,向接下来的区域(假想区域或者基准区域)移动。变为在移动的途中通过指定区域。在没有通行权的情况下,在指定区域的跟前的假想区域待机,直到取得通行权。
[0215]
以下,以agv0和agv1为例,对移动体的动作进行说明。
[0216]
agv0接收图19的第1个移动体指令数据,按次序执行所接收到的移动体指令数据所包含的命令。agv1接收图19的第2个移动体指令数据,按次序执行所接收到的移动体指令数据所包含的命令。在此,为了进行说明,设想接收到移动体指令数据的agv0和agv1同时开始执行命令的情况。
[0217]
[agv0]
[0218]
agv0执行sendright(na,agv0),向agv0提供na的通行权。执行接下来的命令pa。由于已经存在于区域pa,因此,执行接下来的命令ia。agv0通过执行命令ia,向假想区域ia移动。agv0在到达了假想区域ia时或者到达假想区域ia之前,执行接下来的命令haveright(na)。agv0具有na的通行权,因此,执行接下来的命令ib。通过执行命令ib,驶向假想区域ib。在驶向假想区域ib的途中,通过区域na。当到达假想区域ib时,执行接下来的命令sendright(na,agv1),向agv1提供区域na的通行权。agv0接着执行接下来的命令pb,向区域pb移动。若到达了区域pb,则结束动作。例如,agv0等待从运行计划装置100接收接下来的移动指令数据。
[0219]
[agv1]
[0220]
agv1执行命令pc,但由于已经存在于区域pc,因此,执行接下来的命令ic。agv1通过执行命令ic,驶向假想区域ic。agv1在到达了假想区域ic时或者到达假想区域ic之前,执行接下来的命令haveright(na),对是否具有区域na的通行权进行确认。agv1在尚未取得通行权的情况下,在假想区域ic暂时停止,直到取得na的通行权。agv1在到达ic之前取得na的通行权的情况下或者在ic取得了na的通行权的情况下,执行接下来的命令id,驶向假想区域id。agv1当到达假想区域id时,执行接下来的命令sendright(na,null)。移动体的id为null,因此,判断为不存在接着接受通行权的移动体。在该情况下,也可以废弃通行权。或者,也可以向运行计划装置100发送通行权。在该情况下,运行计划装置100能够掌握所计划的全部移动体通过了通行权涉及的指定区域这一情况。agv1执行接下来的命令pd,向区域pd移动。若到达了区域pb,则结束动作。例如,agv1等待从运行计划装置100接收接下来的移动指令数据。
[0221]
图20是表示接收到移动指令数据的移动体的动作的一个例子的流程图。移动体的命令执行部52从最先开始按次序确定移动指令数据所包含的多个命令。对所确定的命令的种类进行确认(s41)。在为移动命令时,向由移动命令指定的区域(基准区域或者假想区域)移动(s42)。向该区域移动了之后,对是否执行了全部命令进行判断(s47)。此外,在移动体位于最先的出发地点(开始地点)的情况下,在最先的命令为向开始地点的移动命令时,不需要进行移动。
[0222]
在步骤s47中判断为未执行完全部的命令的情况下(否),确定接下来的命令(s48),返回到步骤s41。在执行完全部的命令的情况下(是),结束本处理。
[0223]
在所确定的命令不是移动命令的情况下(s41:否),对命令是对于指定区域的通行权提供命令和通行权确认命令中的哪个进行判断(s43)。
[0224]
在所确定的命令为通行权提供命令的情况下,向由通行权提供命令指定的移动体提供对于由通行权提供命令指定的指定区域的通行权(s46)。此后,进入步骤s45。
[0225]
在所确定的命令为通行权确认命令的情况下,对是否具有指定区域的通行权进行确认(s44)。在自身移动体最先通过指定区域的情况下,已经具有通行权,在那之外的情况
下,对是否已从其他移动体取得指定区域的通行权(是否已接收到包含表示通行权的信息的数据)进行判断。在具有通行权的情况下,确定接下来的命令(s48),返回到步骤s41。
[0226]
根据本实施方式,通过移动体间的通信,交接对于指定区域的通行权,由此能够防止指定区域中的移动体间的竞争。例如,在未取得指定区域的通行权的情况下,通过在指定区域的跟前的假想区域暂时停止,能够防止竞争。另外,通过在到达指定区域的跟前的假想区域之前接受通行权,能够在该假想区域不停止地向指定区域移动。
[0227]
(硬件结构)
[0228]
图21表示图1的运行计划装置100的硬件结构。图1的运行计划装置100由计算机装置300构成。计算机装置300具备cpu301、输入接口302、显示装置303、通信装置304、主存储装置305以及外部存储装置306,这些部件通过总线307相互连接。
[0229]
cpu(中央运算装置)301在主存储装置305上执行作为计算机程序的运行计划程序(信息处理程序)。运行计划程序是指实现运行计划装置100的上述的各功能结构的程序。运行计划程序也可以不是1个程序,而是通过多个程序、脚本的组合来实现。cpu301通过执行运行计划程序,实现各功能结构。
[0230]
输入接口302是用于向运行计划装置100输入来自键盘、鼠标以及触摸面板等的输入装置的操作信号的电路或者输入装置。
[0231]
显示装置303显示从运行计划装置100输出的数据。显示装置303例如是lcd(液晶显示器)、有机电致发光显示器、crt(阴极射线管,显像管)或者pdp(等离子体显示器),但不限于此。从计算机装置300输出的数据能够显示于该显示装置303。
[0232]
通信装置304是用于运行计划装置100与外部装置以无线或者有线的方式进行通信的电路。数据能够经由通信装置304从外部装置进行输入。能够将从外部装置输入的数据保存于主存储装置305、外部存储装置306。
[0233]
主存储装置305存储运行计划程序、运行计划程序的执行所需要的数据、以及通过运行计划程序的执行而生成的数据等。运行计划程序被展开在主存储装置305上而被进行执行。主存储装置305例如为ram、dram、sram,但不限于此。图1的各db或者存储部也可以构建在主存储装置305上。
[0234]
外部存储装置306存储运行计划程序、运行计划程序的执行所需要的数据以及通过运行计划程序的执行而生成的数据等。这些运行计划程序、数据在执行运行计划程序时被读出到主存储装置305。外部存储装置306例如是硬盘、光盘、闪速存储器以及磁带,但不限于此。图1的各db或者各存储部也可以构建在外部存储装置306上。
[0235]
此外,运行计划程序既可以预先安装于计算机装置300,也可以存储于cd-rom等的存储介质。另外,运行计划程序也可以被上传到互联网上。
[0236]
另外,运行计划装置100既可以由单一的计算机装置300构成,也可以作为包括相互连接的多个计算机装置300的系统来构成。
[0237]
[技术方案1]
[0238]
一种行驶控制装置,具备:
[0239]
移动指令数据生成部,其取得第1移动体在行驶区中的行驶路线、和通过顺序信息,确定第3区域,基于所述第3区域和所述通过顺序信息来生成所述第1移动体的移动指令数据,所述行驶区包括多个第1区域和设定于所述多个第1区域之间的多条行驶道路中的至
少一条行驶道路的第2区域,所述通过顺序信息决定了包括所述第1移动体的多个移动体通过所述行驶路线所包含的所述第1区域的顺序,所述第3区域是在所述行驶路线中位于所述第1区域之前的所述第2区域;和
[0240]
通信部,其向所述第1移动体发送所述移动指令数据。
[0241]
[技术方案2]
[0242]
根据技术方案1所述的行驶控制装置,
[0243]
所述移动指令数据包括:
[0244]
向所述第3区域移动的第1命令;
[0245]
向所述行驶控制装置确认是否被允许通过所述第1区域的第2命令;以及
[0246]
在被允许通过所述第1区域的情况下通过所述第3区域的第3命令。
[0247]
[技术方案3]
[0248]
根据技术方案1所述的行驶控制装置,
[0249]
所述移动指令数据生成部确定作为在所述行驶路线中位于所述第1区域之后的所述第2区域的第4区域,使用所述第4区域和所述第3区域来生成所述移动指令数据。
[0250]
[技术方案4]
[0251]
根据技术方案3所述的行驶控制装置,
[0252]
所述移动指令数据包括:
[0253]
向所述第3区域移动的第1命令;
[0254]
向所述行驶控制装置确认是否被允许通过所述第1区域的第2命令;
[0255]
在被允许通过所述第1区域的情况下向所述第4区域移动的第3命令;以及
[0256]
在到达了所述第4区域时向所述行驶控制装置发送表示通过了所述第1区域这一情况的信息的第4命令。
[0257]
[技术方案5]
[0258]
根据技术方案2所述的行驶控制装置,
[0259]
具备行驶控制部,所述行驶控制部从执行所述第2命令的所述第1移动体接收是否被允许通过所述第1区域的询问数据,基于所述通过顺序信息来判断是否允许所述第1移动体的通过,在允许所述第1移动体的通过的情况下,发送允许所述第1移动体通过的允许通知。
[0260]
[技术方案6]
[0261]
根据技术方案4所述的行驶控制装置,
[0262]
具备行驶控制部,所述行驶控制部从执行所述第2命令的所述第1移动体接收是否被允许通过所述第1区域的询问数据,基于所述通过顺序信息来判断是否允许所述第1移动体的通过,在允许所述第1移动体的通过的情况下,发送允许所述第1移动体通过的允许通知,在从执行所述第4命令的所述第1移动体接收到表示通过所述第1区域这一情况的通过完成通知的情况下,决定为所述第1移动体已通过所述第1区域。
[0263]
[技术方案7]
[0264]
根据技术方案3所述的行驶控制装置,
[0265]
所述移动指令数据包括:
[0266]
向所述第3区域移动的第1命令;
[0267]
对是否已从第2移动体取得所述第1区域的通行权进行确认的第2命令;
[0268]
在已取得所述通行权的情况下向所述第4区域移动的第3命令;以及
[0269]
在向所述第4区域移动了之后向第3移动体提供所述通行权的第4命令。
[0270]
[技术方案8]
[0271]
根据技术方案1~7中任一项所述的行驶控制装置,
[0272]
设定有所述第3区域的所述行驶道路结合于所述第1区域。
[0273]
[技术方案9]
[0274]
根据技术方案1~8中任一项所述的行驶控制装置,
[0275]
所述第1移动体是自主移动系统的移动体。
[0276]
[技术方案10]
[0277]
一种移动体,具备:
[0278]
行驶控制部,其对包括多个第1区域和第2区域的行驶区的行驶进行控制,所述第2区域设定于所述多个第1区域之间的多条行驶道路中的至少一条行驶道路;和
[0279]
通信部,其能够与对多个移动体的行驶进行控制的行驶控制装置或者所述多个移动体中的至少1台进行通信,
[0280]
所述行驶控制部,
[0281]
将在所述移动体的行驶路线中位于所述第1区域之前的所述第2区域作为第3区域,
[0282]
基于与所述行驶控制装置或者被决定了在所述移动体之前通过所述第1区域的第1移动体的通信,对是否能够通过所述第1区域进行确认,
[0283]
进行控制以使得:在能够通过所述第1区域的情况下,通过所述第3区域,在不能通过所述第1区域的情况下,不通过所述第3区域,直到变为能够通过所述第1区域。
[0284]
[技术方案11]
[0285]
根据技术方案10所述的移动体,
[0286]
具备通行权处理部,所述通行权处理部从所述第1移动体取得对于所述第1区域的通行权,
[0287]
所述行驶控制部进行控制以使得:不通过所述第3区域,直到取得所述通行权,在从所述第1移动体取得了所述通行权之后,通过所述第3区域,
[0288]
所述通行权处理部至少在所述移动体通过了所述第1区域之后,向第2移动体提供所述通行权。
[0289]
[技术方案12]
[0290]
根据技术方案11所述的移动体,
[0291]
所述通行权处理部在所述移动体移动到第4区域之后向所述第2移动体提供所述通行权,所述第4区域是在所述行驶路线中位于所述第1区域之后的所述第2区域。
[0292]
[技术方案13]
[0293]
根据技术方案11或者12所述的移动体,
[0294]
所述行驶控制部在到达了所述第3区域的时间点未取得所述通行权的情况下,在所述第3区域停止,直到取得所述通行权。
[0295]
[技术方案14]
[0296]
根据技术方案11或者12所述的移动体,
[0297]
所述行驶控制部在到达所述第3区域之前取得所述通行权的情况下,在所述第3区域不停止而通过所述第3区域。
[0298]
[技术方案15]
[0299]
根据技术方案12所述的移动体,
[0300]
具备命令执行部,所述命令执行部接收移动指令数据,执行所述移动指令数据所包含的第1命令~第4命令,所述移动指令数据包含所述第1命令~所述第4命令,
[0301]
所述第1命令是向所述第3区域移动的命令,
[0302]
所述第2命令是对是否已从所述第1移动体取得所述通行权进行确认的命令,
[0303]
所述第3命令是在已取得所述通行权的情况下向所述第4区域移动的命令,
[0304]
所述第4命令是在向所述第4区域移动了之后向所述第2移动体提供所述通行权的命令。
[0305]
[技术方案16]
[0306]
根据技术方案15所述的移动体,
[0307]
所述行驶控制部进行控制以使得所述移动体停止于所述第3区域,
[0308]
所述命令执行部在所述移动体在所述第3区域停止了的状态下执行所述第2命令。
[0309]
[技术方案17]
[0310]
根据技术方案15所述的移动体,
[0311]
所述命令执行部在所述移动体到达所述第3区域之前执行所述第2命令,所述行驶控制部在能够确认到所述移动体在到达所述第3区域之前已取得所述通行权的情况下,使得所述移动体在所述第3区域不停止而通过所述第3区域。
[0312]
[技术方案18]
[0313]
根据技术方案10所述的移动体,
[0314]
所述行驶控制部,
[0315]
向所述行驶控制装置确认是否被允许通过所述第1区域,
[0316]
在由所述行驶控制装置允许了通过所述第1区域的情况下,进行控制以使得通过所述第3区域。
[0317]
[技术方案19]
[0318]
根据技术方案10所述的移动体,
[0319]
所述行驶控制部在所述移动体移动到第4区域之后,向所述行驶控制装置发送表示通过了所述第1区域这一情况的信息,所述第4区域是在所述行驶路线中位于所述第1区域之后的所述第2区域。
[0320]
[技术方案20]
[0321]
根据技术方案18或者19所述的移动体,
[0322]
所述行驶控制部在到达了所述第3区域的时间点未被所述行驶控制装置允许通过所述第1区域的情况下,在所述第3区域停止,直到被允许通过所述第1区域。
[0323]
[技术方案21]
[0324]
根据技术方案18或者19所述的移动体,
[0325]
所述行驶控制部在到达所述第3区域之前被允许了通过所述第1区域的情况下,进
行控制以使得在所述第3区域不停止而通过所述第3区域。
[0326]
[技术方案22]
[0327]
根据技术方案10、18~21中任一项所述的移动体,
[0328]
具备命令执行部,所述命令执行部接收移动指令数据,执行所述移动指令数据所包含的第1命令~第3命令,所述移动指令数据包含所述第1命令~所述第3命令,
[0329]
所述第1命令是向所述第3区域移动的命令,
[0330]
所述第2命令是向所述行驶控制装置确认是否被所述行驶控制装置允许通过所述第1区域的命令,
[0331]
所述第3命令是在被允许通过所述第1区域的情况下通过所述第3区域的命令。
[0332]
[技术方案23]
[0333]
根据技术方案22所述的移动体,
[0334]
所述第3命令是所述移动体向第4区域移动的命令,所述第4区域是在所述行驶路线中位于所述第1区域之后的所述第2区域,
[0335]
所述移动指令数据包含第4命令,所述第4命令是在所述移动体向所述第4区域移动了之后向所述行驶控制装置发送表示通过了所述第1区域这一情况的信息的命令,
[0336]
所述命令执行部执行所述第4命令。
[0337]
[技术方案24]
[0338]
根据技术方案22或者23所述的移动体,
[0339]
所述行驶控制部进行控制以使得所述移动体停止于所述第3区域,
[0340]
所述命令执行部在所述移动体在所述第3区域停止了的状态下执行所述第2命令。
[0341]
[技术方案25]
[0342]
根据技术方案22或者23所述的移动体,
[0343]
所述命令执行部在所述移动体到达所述第3区域之前执行所述第2命令,所述行驶控制部在所述移动体到达所述第3区域之前被允许了通过所述第1区域的情况下,使得所述移动体在所述第3区域不停止而通过所述第3区域。
[0344]
[技术方案26]
[0345]
根据技术方案10~25中任一项所述的移动体,
[0346]
设定有所述第3区域的所述行驶道路结合于所述第1区域。
[0347]
[技术方案27]
[0348]
根据技术方案10~26中任一项所述的移动体,
[0349]
所述移动体是自主移动系统的移动体。
[0350]
[技术方案28]
[0351]
一种运行系统,具备行驶控制装置和第1移动体,
[0352]
所述行驶控制装置具备移动指令数据生成部和通信部,
[0353]
所述移动指令数据生成部取得通过顺序信息,所述通过顺序信息表示在对于包括多个第1区域和第2区域的行驶区的多个移动体的行驶路线中、所述多个移动体共同通过的所述第1区域的所述多个移动体的通过顺序,所述第2区域设定于所述多个第1区域之间的多条行驶道路中的至少一条行驶道路,
[0354]
所述移动指令数据生成部将在所述多个移动体中的第1移动体的行驶路线中设定
于所述第1移动体的行驶道路的第2区域作为第3区域,
[0355]
所述移动指令数据生成部基于所述第3区域和所述通过顺序信息,生成所述第1移动体的移动指令数据,
[0356]
所述通信部向所述移动体发送所述移动指令数据,
[0357]
所述移动体具备:
[0358]
通信部,其接收所述移动指令数据;和
[0359]
行驶控制部,其基于所述移动指令数据来在所述行驶区中行驶。
[0360]
此外,本发明并不限定为上述实施方式不变,可以在实施阶段中在不脱离其宗旨的范围内对构成要素进行变形来具体化。另外,通过上述实施方式所公开的多个构成要素的适当的组合,能够形成各种发明。例如,也可以从实施方式所示的全部构成要素中删去几个构成要素。进一步,也可以适当地组合不同的实施方式中的构成要素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1