一种气动压力控制系统及控制方法与流程
[0001]
本发明涉及一种压力控制系统及控制方法,尤其是一种气动压力控制系统及控制方法。
背景技术:
[0002]
目前在气动压力控制中,普遍应用比例阀或者高速开关阀构成系统,以实现连续调压;由于比例阀价格昂贵,体积较大,最近使用高速开关阀来组成调压系统的应用越来越多,但是在实际微调控制时效果并不理想;由于电磁阀的响应能力及阀芯的运动时间影响,控制器发给开关阀的pwm信号实际存在一定滞后,开关阀存在控制器给定pwm占空比较低时无法打开,在较高占空比时提早全开的问题,而且调节精度不高,在通过接收压力反馈进行闭环调节时,需要经过多轮调节才能达到所需压力值,耗时较长。
技术实现要素:
[0003]
本发明所要解决的技术问题是提供一种气压控制精度较高且控制较为稳定的气动压力控制系统及控制方法。
[0004]
本发明解决上述技术问题所采用的技术方案为:一种气动压力控制系统,包括压力传感器、预设有目标偏差计算模块的plc控制模块、pid控制模块、预设有开关阀控制规则的pwm控制模块和开关阀组模块,所述的压力传感器用于检测用气设备的进气端口的气压得到当前气压反馈值并发送至所述的plc控制模块中预设的目标偏差计算模块,所述的目标偏差计算模块根据外部输入的给定压力值和当前气压反馈值获取对应的当前目标偏差值并输入所述的pid控制模块,所述的pid控制模块根据当前目标偏差值获取对应的当前控制量并发送至所述的pwm控制模块,所述的开关阀组模块包括阀组基座、设置在所述的阀组基座内的总进气管和总出气管,所述的总进气管设置有一个与外部供气设备的供气口连通的总进气口和一个设置有排气开关阀的排气口,所述的总出气管设置有一个与用气设备的进气端口连通的总出气口,所述的总进气管与所述的总出气管之间通过至少七条互不连通的进气支管连通,每条所述的进气支管设置有一个进气开关阀,所述的pwm控制模块根据当前控制量和预设的开关阀控制规则分别输出相应的pwm控制信号单独控制每个所述的进气开关阀及所述的排气开关阀的通气量大小。
[0005]
所述的进气支管为11条。进一步提高精度,且预设的开关阀控制规则中的数值设置较为方便。
[0006]
预设的开关阀控制规则具体如下:将pid控制模块输出的当前控制量记为q%,-q
m
%≤q%≤q
m
%,q
m
%表示与10个进气开关阀完全打开时的通气量对应的控制量,令q
m
%=100%,定义pwm控制信号无法打开进气开关阀和排气开关阀所对应的死区占空比的范围为0~(10s
1
)%,定义pwm控制信号完全打开进气开关阀和排气开关阀所对应的占空比的范围为(10s
2
)%~100%,将s
1
设置为s
1
=2.0,将s
2
设置为s
2
=8.0;
对q进行判断,若q>0,将q除以10得到商n和余数r,0≤n≤10,0≤r<10,当2.0≤r<8.0时执行规则一,当r<2.0时执行规则二,当8.0≤r<10.0时执行规则三,规则一如下:将n个进气开关阀对应的pwm控制信号的占空比设置为大于80%的一个定值,将其它进气开关阀中的一个进气开关阀对应的pwm控制信号的占空比设置为(10r)%,将剩余进气开关阀对应的pwm控制信号的占空比设置为0%;规则二如下:将n个进气开关阀对应的pwm控制信号的占空比设置为大于80%的一个定值,将其它进气开关阀中的一个进气开关阀对应的pwm控制信号的占空比设置为(10a)%,将排气开关阀对应的pwm控制信号的占空比设置为(10b)%,其中,a为预先设置的一个定值,5<a<8,a-b=r,将剩余进气开关阀对应的pwm控制信号的占空比设置为0%;规则三如下:将n个进气开关阀对应的pwm控制信号的占空比设置为大于80%的一个定值,将其它进气开关阀中的两个进气开关阀对应的pwm控制信号的占空比分别设置为(10c)%,其中,c=r/2,将剩余进气开关阀对应的pwm控制信号的占空比设置为0%;若q=0,执行规则四如下:pwm控制模块输出的pwm控制信号保持不变;若-2.0≤q<0,执行规则五如下:将进气开关阀中的一个进气开关阀对应的pwm控制信号的占空比设置为(10d)%,将排气开关阀对应的pwm控制信号的占空比设置为(10e)%,其中,e为预先设置的一个定值,5<e<8,d-e=q;若-10.0<q<-2.0,执行规则六如下:将排气开关阀对应的pwm控制信号的占空比设置为(-10q)%;若q≤-10.0,执行规则七如下:将排气开关阀对应的pwm控制信号的占空比设置为大于80%的一个定值。
[0007]
所述的总进气管与所述的总出气管之间设置有至少一条备用进气管,所述的备用进气管内设置有一个用于控制该条备用进气管通断状态的备用开关阀,所述的pwm控制模块根据预设的开关阀控制规则在其中一个所述的进气开关阀失效时将原本发送至该失效的进气开关阀的pwm控制信号切换发送至一个所述的备用开关阀。
[0008]
所述的进气开关阀及所述的备用开关阀在所述的阀组基座上错位排成左右两排。结构紧凑,有效缩小阀组基座体积。
[0009]
使用上述气动压力控制系统的控制方法,包括以下步骤:plc控制模块在最初先将外部给定的压力值直接发送至pid控制模块,pid控制模块根据外部给定的压力值获取当前控制量并发送至pwm控制模块,pwm控制模块根据当前控制量和预设的开关阀控制规则分别输出相应的pwm控制信号单独控制每个所述的进气开关阀及排气开关阀的通气量大小,外部供气设备的供气口向总进气管的总进气口开始供气,并通过总出气口将所供气体发送至用气设备的进气端口;压力传感器检测用气设备的进气端口的气压得到当前气压反馈值并发送至plc控制模块中预设的目标偏差计算模块;目标偏差计算模块根据外部输入的给定压力值和当前气压反馈值获取对应的当前目标偏差值并输入pid控制模块; pid控制模块根据当前目标偏差值获取对应的当前控制量并发送至pwm控制模块; pwm控制模块根据当前控制量和预设的开关阀控制规则分别输出相应的pwm控制
信号单独控制每个所述的进气开关阀及排气开关阀的通气量大小;重复执行步骤,直至当前目标偏差值为0时,完成对气动压力控制系统的控制过程。
[0010]
与现有技术相比,本发明的优点在于采用闭环pid控制系统,包括压力传感器、预设有目标偏差计算模块的plc控制模块、pid控制模块、预设有开关阀控制规则的pwm控制模块和开关阀组模块,其中开关阀组模块包括阀组基座、设置在阀组基座内的总进气管和总出气管,总进气管设置有一个与外部供气设备的供气口连通的总进气口和一个设置有排气开关阀的排气口,总出气管设置有一个与用气设备的进气端口连通的总出气口,总进气管与总出气管之间通过至少七条互不连通的进气支管连通,每条进气支管设置有一个进气开关阀,其中压力传感器检测用气设备的进气端口的气压得到当前气压反馈值并发送至plc控制模块中预设的目标偏差计算模块,目标偏差计算模块根据外部输入的给定压力值和当前气压反馈值获取对应的当前目标偏差值并输入pid控制模块,pid控制模块根据当前目标偏差值获取对应的当前控制量并发送至pwm控制模块,pwm控制模块根据当前控制量和预设的开关阀控制规则分别输出相应的pwm控制信号单独控制每个进气开关阀及排气开关阀的通气量大小控制多个开关阀,从而跟随给定压力;其中进气支管的数量为至少七条,能够在预设的开关阀控制规则将当前控制量通过给每个进气开关阀和排气开关阀设置单独的控制量后整体实现,有效解决开关阀在pwm控制信号占空比较低时无法打开,在较高占空比时提早全开的问题,并且提高控制气压的精度,增加稳定性,调节较为快速。
附图说明
[0011]
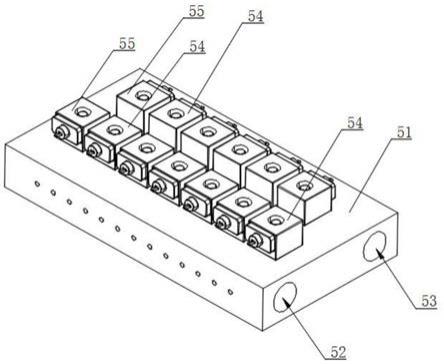
图1为实施例一的系统框图;图2为实施例二中开关阀组模块的结构示意图;图3为采用实施例三的方法实际工作时plc控制模块采集的压力反馈曲线。
具体实施方式
[0012]
以下结合附图实施例对本发明作进一步详细描述。
[0013]
实施例一:一种气动压力控制系统,包括压力传感器1、预设有目标偏差计算模块的plc控制模块2、pid控制模块3、预设有开关阀控制规则的pwm控制模块4和开关阀组模块5,压力传感器1用于检测用气设备6的进气端口的气压得到当前气压反馈值并发送至plc控制模块2中预设的目标偏差计算模块,目标偏差计算模块根据外部输入的给定压力值和当前气压反馈值获取对应的当前目标偏差值并输入pid控制模块3,pid控制模块3根据当前目标偏差值获取对应的当前控制量并发送至pwm控制模块4,开关阀组模块5包括阀组基座51、设置在阀组基座51内的总进气管(图未显示)和总出气管(图未显示),总进气管设置有一个与外部供气设备7的供气口连通的总进气口52和一个设置有排气开关阀(图未显示)的排气口(图未显示),总出气管设置有一个与用气设备6的进气端口连通的总出气口53,总进气管与总出气管之间通过11条互不连通的进气支管(图未显示)连通,每条进气支管设置有一个进气开关阀54,pwm控制模块4根据当前控制量和预设的开关阀控制规则分别输出相应的pwm控制信号单独控制每个进气开关阀54及排气开关阀的通气量大小,预设的开关阀控制规则具体如下:
将pid控制模块3输出的当前控制量记为q%,-q
m
%≤q%≤q
m
%,q
m
%表示与10个进气开关阀54完全打开时的通气量对应的控制量,令q
m
%=100%,定义pwm控制信号无法打开进气开关阀54和排气开关阀所对应的占空比的范围为0~(10s
1
)%,定义pwm控制信号完全打开进气开关阀54和排气开关阀所对应的占空比的范围为(10s
2
)%~100%,将s
1
设置为s
1
=2.0,将s
2
设置为s
2
=8.0;此时,进气开关阀54的开启时间为10ms,关断时间为10ms,工作频率为10hz,排气开关阀与进气开关阀54的参数相同;对q进行判断,若q>0,将q除以10得到商n和余数r,0≤n≤10,0≤r<10,当2.0≤r<8.0时执行规则一,当r<2.0时执行规则二,当8.0≤r<10.0时执行规则三,规则一如下:将n个进气开关阀54对应的pwm控制信号的占空比设置为90%,将其它进气开关阀54中的一个进气开关阀54对应的pwm控制信号的占空比设置为(10r)%,将剩余进气开关阀54对应的pwm控制信号的占空比设置为0%;规则二如下:将n个进气开关阀54对应的pwm控制信号的占空比设置为90%,将其它进气开关阀54中的一个进气开关阀54对应的pwm控制信号的占空比设置为(10a)%,将排气开关阀对应的pwm控制信号的占空比设置为(10b)%,其中,a为预先设置的一个定值,5<a<8,a-b=r,将剩余进气开关阀54对应的pwm控制信号的占空比设置为0%;如r=1.2,a=6.0,b=4.8;规则三如下:将n个进气开关阀54对应的pwm控制信号的占空比设置为90%,将其它进气开关阀54中的两个进气开关阀54对应的pwm控制信号的占空比分别设置为(10c)%,其中,c=r/2,将剩余进气开关阀54对应的pwm控制信号的占空比设置为0%;如r=9.2,c=4.6;若q=0,执行规则四如下:pwm控制模块4输出的pwm控制信号保持不变;若-2.0≤q<0,执行规则五如下:将进气开关阀54中的一个进气开关阀54对应的pwm控制信号的占空比设置为(10d)%,将排气开关阀对应的pwm控制信号的占空比设置为(10e)%,其中,e为预先设置的一个定值,5<e<8,d-e=q;如q=-1.3,d=4.8,e=6.1;若-10.0<q<-2.0,执行规则六如下:将排气开关阀对应的pwm控制信号的占空比设置为(-10q)%;若q≤-10.0,执行规则七如下:将排气开关阀对应的pwm控制信号的占空比设置为90%。其中,pwm控制信号的占空比设置为90%,也可设置为大于80%的任意值。
[0014]
实施例二:其余部分与实施例一相同,其不同之处在于总进气管与总出气管之间设置有两条备用进气管(图未显示),备用进气管内设置有一个用于控制该条备用进气管通断状态的备用开关阀55,pwm控制模块4根据预设的开关阀控制规则在其中一个进气开关阀54失效时将原本发送至该失效的进气开关阀54的pwm控制信号切换发送至一个备用开关阀55,进气开关阀54及备用开关阀55在阀组基座51上错位排成左右两排。
[0015]
实施例三:使用实施例一的气动压力控制系统的控制方法,包括以下步骤:plc控制模块2在最初先将外部给定的压力值直接发送至pid控制模块3,pid控制模块3根据外部给定的压力值获取当前控制量并发送至pwm控制模块4,pwm控制模块4根据当前控制量和预设的开关阀控制规则分别输出相应的pwm控制信号单独控制每个进气开关阀54及排气开关阀的通气量大小,外部供气设备7的供气口向总进气管的总进气口52开始供气,并通过总出气口53将所供气体发送至用气设备6的进气端口;压力传感器1检测用气设备6的进气端口的气压得到当前气压反馈值并发送至plc
控制模块2中预设的目标偏差计算模块;目标偏差计算模块根据外部输入的给定压力值和当前气压反馈值获取对应的当前目标偏差值并输入pid控制模块3;pid控制模块3根据当前目标偏差值获取对应的当前控制量并发送至pwm控制模块4;pwm控制模块4根据当前控制量和预设的开关阀控制规则分别输出相应的pwm控制信号单独控制每个进气开关阀54及排气开关阀的通气量大小;重复执行步骤,直至当前目标偏差值为0时,完成对气动压力控制系统的控制过程。初始给压力时,反馈值为0,因此当前控制量q%=100%,其中的10个进气开关阀54全部打开。
[0016]
如图3所示,i是pid控制阶段,ii是稳压阶段的波形,iii是压力输出稳定后,给定一负阶跃压力时的系统响应,可见系统响应快,没有明显过冲,控制稳定性好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1