一种基于自适应分段滑模控制的污泥膨胀抑制方法与流程
[0001]
本发明专利利用基于自适应分段滑模控制的污泥膨胀抑制方法实现污水处理过程中污泥膨胀的抑制,通过调控过程变量溶解氧浓度和硝态氮浓度协调生化反应过程,使污水处理过程稳定或重新达到正常工况;污泥体积指数是衡量污泥膨胀的重要指标,在控制过程中实时预测该指标具有重要意义;保证污水处理过程在发生污泥膨胀时恢复到正常工况,既属于水研究领域,又属于智能控制领域;
背景技术:
[0002]
水是城市发展最重要的基础资源。近年来,工业的不断发展致使污水排放逐渐加重,制约国民经济并影响生态环境。城市污水处理过程能够实现水资源的可持续利用和良性循环,是城市发展的重要举措。该过程具有工作的连续性和不可替代性,一旦发生异常工况,将会影响整个处理过程的运作,产生巨大的经济损失和重要的社会影响。污泥膨胀是最典型的异常工况之一,是制约污水处理过程正常运行的主要瓶颈。
[0003]
污泥膨胀的危害主要表现在两个方面:轻度的污泥膨胀会导致二沉池中污泥压缩不足,回流效率低,污水处理能力降低;严重的污泥膨胀会破坏二沉池,使其出现泥水分离,最终导致整个系统崩溃。污泥膨胀机理复杂,涉及复杂的微生物生长过程和多种相关因素,给抑制污泥膨胀、维护污水处理过程平稳运行带来了巨大的挑战。目前,污泥体积指数是确定污泥膨胀等级最常用的标准,可以用来衡量活性污泥的沉降性能。污泥体积指数一般是通过实验室的离线分析技术进行确定,难以进行自动化监测和控制。因此,抑制污泥膨胀,保证污水处理过程可靠稳定运行是一个亟待解决的问题;基于自适应分段滑模控制的污泥膨胀抑制方法能够调整过程变量溶解氧浓度和硝态氮浓度、实时预测污泥体积指数、协调生化反应过程并改善污泥沉降特性实现污水处理过程中污泥膨胀的抑制,使污水处理过程保持在正常工况,对水资源可持续利用和环境保护具有重要意义。
[0004]
本发明设计了一种基于自适应分段滑模控制的污泥膨胀抑制方法,主要通过实时预测污水处理过程的污泥体积指数,构建分段滑模控制器并设计自适应切换机制,完成污泥膨胀的抑制。
技术实现要素:
[0005]
本发明获得了一种基于自适应分段滑模控制的污泥膨胀抑制方法,利用好氧池溶解氧浓度、二沉池污泥负荷率、二沉池混合液悬浮固体浓度、二沉池污泥停留时间和回流比实时预测污水处理过程的污泥体积指数,构建多段滑模控制器调节溶解氧浓度和硝态氮浓度,并设计自适应切换机制,使污水处理过程保持在正常工况,实现污泥膨胀的抑制;
[0006]
本发明采用了如下的技术方案及实现步骤:
[0007]
1.一种基于自适应分段滑模控制的污泥膨胀抑制方法,
[0008]
通过实时预测污泥体积指数,设计合适的滑模控制器,完成污泥膨胀的抑制;
[0009]
其特征在于,包括以下步骤:
[0010]
(1)设计用于污泥体积指数实时预测的模糊神经网络,模糊神经网络的结构分为四层:
[0011]
输入层、径向基层、归一化层和输出层;具体为:
[0012]
输入层:该层包括5个输入神经元:
[0013]
α(p)=[α1(p),α2(p),α3(p),α4(p),α5(p)]
t
ꢀꢀꢀꢀꢀ
(1)
[0014]
其中,α(p)是p时刻模糊神经网络的输入向量,α1(p)为p时刻好氧池溶解氧浓度,α2(p)为p时刻二沉池污泥负荷率,α3(p)为p时刻二沉池混合液悬浮固体浓度,α4(p)为p时刻二沉池污泥停留时间,α5(p)为p时刻回流比,t为矩阵的转置,p为模糊神经网络训练过程的时刻,p为最大迭代次数;
[0015]
径向基层:该层包括k个径向基神经元,k为[5,15]之间的正整数,利用高斯函数对输入进行模糊处理,每个径向基神经元的输出为:
[0016][0017]
其中e=2.72,β
j
(p)为p时刻第j个径向基神经元的输出,c
ij
(p)为p时刻第i个输入神经元和第j个径向基神经元的中心值,σ
ij
(p)为p时刻第i个输入神经元和第j个径向基神经元的宽度值,i=1,2,
…
,5,j=1,2,
…
,k;
[0018]
归一化层:该层包括k个归一化神经元,每个归一化神经元的输出为:
[0019][0020]
其中η
j
(p)为p时刻第j个归一化神经元的输出,η(p)=[η1(p),η2(p),
…
,η
k
(p)]
t
是归一化神经元输出矩阵;
[0021]
输出层:该层包括1个神经元,输出为:
[0022]
g(p)=w(p)η(p)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0023]
其中g(p)是神经网络的输出值,w(p)=[w1(p),w2(p),
…
,w
k
(p)]是输出权值参数矩阵,w
k
(p)为p时刻第k个归一化神经元的输出权值;
[0024]
(2)训练模糊神经网络,初始p=1,具体为:
[0025]
①
计算模糊神经网络误差:
[0026][0027]
其中g
d
(p)是模糊神经网络的期望输出值;
[0028]
②
参数更新如下:
[0029][0030]
其中c
ij
(p+1)为p+1时刻第i个输入神经元和第j个径向基神经元的中心值,σ
ij
(p+
1)为p+1时刻第i个输入神经元和第j个径向基神经元的宽度值,w
j
(p+1)为p+1时刻第j个归一化神经元的输出权值;
[0031]
③
p=p+1,若p<p,则重复步骤
①-②
,若p=p,则结束该循环;
[0032]
(3)二沉池是污水处理运行过程的重要组成部分,调节二沉池模型相关参数获得被控对象的过渡模型,具体为:
[0033]
二沉池模型的双指数污泥沉降速率函数可以描述为:
[0034][0035]
其中v(t)为t时刻污泥沉降速率,v0=474m/d为理论最大沉降速率,r
h
=0.000576m3/g
·
ss为沉降扰动参数,x
z
(t)为t时刻第z层悬浮物浓度,z=1,2,
…
,10;
[0036]
根据不同运行工况建立污泥膨胀发生到恢复正常工况的控制模型:
[0037][0038]
其中其中和分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的变化率,u(t)=[u1(t),u2(t)]
t
,u1(t)和u2(t)分别表示t时刻控制输入变量曝气量和内回流,f
tr
(t)和b
tr
(t)分别为2
×
2的矩阵和2维列向量,tr为划分工况的个数,且tr=1,2,3,t为控制过程的时刻;
[0039]
(4)设计用于污泥膨胀发生后溶解氧浓度和硝态氮浓度的自适应分段滑模控制方法,具体为:
[0040]
初始化三个滑模控制器,每个控制器包括滑模面的计算s
tr
(t)和控制律的求解u
tr
(t)的两部分,t初值设为0;
[0041]
①
计算被控变量溶解氧浓度和硝态氮浓度的偏差:
[0042]
e(t)=x(t)-x
d
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0043]
其中x(t)=[x1(t),x2(t)]
t
,x1(t)和x2(t)分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的实际值,x
d
(t)=[x
1d
(t),x
2d
(t)]
t
,x
1d
(t)和x
2d
(t)分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的期望值;
[0044]
②
获取公式(1)中的水质数据好氧池溶解氧浓度、二沉池污泥负荷率、二沉池混合液悬浮固体浓度、二沉池污泥停留时间和回流比,根据公式(2)-(4)计算该时刻的污泥体积指数;
[0045]
若污泥体积指数介于0到150之间,则执行步骤
③
;
[0046]
若污泥体积指数大于150,小于等于250,则执行步骤
④
;
[0047]
若污泥体积指数大于250,则执行步骤
⑤
;
[0048]
以下步骤
③
、
④
、
⑤
属于平行关系;
[0049]
③
计算控制器的滑模面:
[0050][0051]
其中e(τ)为关于偏差的被积函数,dτ为积分变量τ的微分,k1为2
×
2的矩阵,其副对角线的各元素为0,主对角线的各元素自上而下分别为0.035、0.25;
[0052]
求解控制器的控制律:
[0053]
[0054]
其中f1(t)和b1(t)为tr=1时f
tr
(t)和b
tr
(t)对应的变量,(t)对应的变量,和分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的期望值的变化率,λ1(t)是t时刻的自适应增益参数,与滑模面的大小有关,可以表示为0.2*√|s1(t)|,始终大于0,√和||分别表示开方运算和绝对值运算,sign()为符号函数,其表达式为:
[0055][0056]
将求解的u1(t)赋给u(t),然后执行步骤
⑥
;
[0057]
④
计算控制器的滑模面:
[0058][0059]
其中k2为2
×
2的矩阵,其副对角线的各元素为0,主对角线的各元素自上而下分别为-0.02、-0.02,ζ2=[0.007,0.007]
t
;
[0060]
求解控制器的控制律:
[0061][0062]
其中f2(t)和b2(t)为tr=2时f
tr
(t)和b
tr
(t)对应的变量,λ2(t)是t时刻的自适应增益参数,与滑模面的大小有关,可以表示为0.2*√|s2(t)|,始终大于0;
[0063]
将求解的u2(t)赋给u(t),然后执行步骤
⑥
;
[0064]
⑤
计算控制器的滑模面:
[0065][0066]
其中k3为2
×
2的矩阵,其副对角线的各元素为0,主对角线的各元素自上而下分别为0.025、0.025,ζ3=[-0.013,-0.013]
t
;
[0067]
求解控制器的控制律:
[0068][0069]
其中f3(t)和b3(t)为tr=3时f
tr
(t)和b
tr
(t)对应的变量,λ3(t)是t时刻的自适应增益参数,与滑模面的大小有关,可以表示为0.2*√|s3(t)|,始终大于0;
[0070]
将求解的u3(t)赋给u(t),然后执行步骤
⑥
;
[0071]
⑥
t=t+1,若t<300,则转到步骤
①
,若t=300,则结束该循环;
[0072]
(5)利用求解的u(t)对溶解氧浓度和硝态氮浓度进行跟踪控制,最终系统的输出为溶解氧的实际浓度值、硝态氮的实际浓度值和预测的污泥体积指数。
[0073]
本发明的创造性主要体现在:
[0074]
(1)本发明针对的污水处理过程是一个污泥膨胀异常工况发生率高的复杂工业工程,且污泥膨胀异常工况具有难以实时检测、识别等特点,采用模糊神经网络获取运行过程的水质参数并预测污泥体积指数判断污水处理运行的所处工况,为控制器的切换提供参考信号,具有高效稳定等特点。
[0075]
(2)本发明采用了基于自适应分段滑模控制的污泥膨胀抑制方法对污水处理过程的溶解氧浓度和硝态氮浓度进行调控,该方法可以根据预测的污泥体积指数判断所处工
况,切换合适的滑模控制器,协调生化反应过程;实现了污泥膨胀发生后能够通过合适的调控方法使污水处理过程过渡到正常工况。
附图说明
[0076]
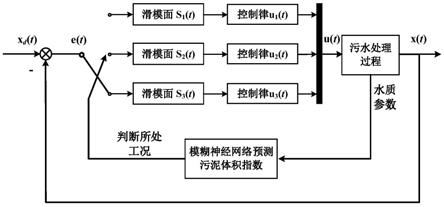
图1是本发明的总体结构图
[0077]
图2是本发明的实时预测污泥体积指数结果图
[0078]
图3是本发明的溶解氧浓度控制结果图
[0079]
图4是本发明的硝态氮浓度控制结果图
具体实施方式
[0080]
本发明获得了一种基于自适应分段滑模控制的污泥膨胀抑制方法,利用好氧池溶解氧浓度、二沉池污泥负荷率、二沉池混合液悬浮固体浓度、二沉池污泥停留时间和回流比实时预测污水处理过程的污泥体积指数,构建多段滑模控制器调节溶解氧浓度和硝态氮浓度,并设计合适的切换机制,使污水处理过程保持在正常工况,实现污泥膨胀的抑制;
[0081]
本发明采用了如下的技术方案及实现步骤:
[0082]
1.一种基于自适应分段滑模控制的污泥膨胀抑制方法,
[0083]
通过实时预测污泥体积指数,设计合适的滑模控制器,完成污泥膨胀的抑制,总体结构如图1;
[0084]
其特征在于,包括以下步骤:
[0085]
(1)设计用于污泥体积指数实时预测的模糊神经网络,模糊神经网络的结构分为四层:
[0086]
输入层、径向基层、归一化层和输出层;具体为:
[0087]
输入层:该层包括5个输入神经元:
[0088]
α(p)=[α1(p),α2(p),α3(p),α4(p),α5(p)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0089]
其中,α(p)是p时刻模糊神经网络的输入向量,α1(p)为p时刻好氧池溶解氧浓度,α2(p)为p时刻二沉池污泥负荷率,α3(p)为p时刻二沉池混合液悬浮固体浓度,α4(p)为p时刻二沉池污泥停留时间,α5(p)为p时刻回流比,t为矩阵的转置,p为模糊神经网络训练过程的时刻,p为最大迭代次数,p=700;
[0090]
径向基层:该层包括k个径向基神经元,k=15,利用高斯函数对输入进行模糊处理,每个径向基神经元的输出为:
[0091][0092]
其中e=2.72,β
j
(p)为p时刻第j个径向基神经元的输出,c
ij
(p)为p时刻第i个输入神经元和第j个径向基神经元的中心值,σ
ij
(p)为p时刻第i个输入神经元和第j个径向基神经元的宽度值,i=1,2,
…
,5,j=1,2,
…
,k;
[0093]
归一化层:该层包括k个归一化神经元,每个归一化神经元的输出为:
[0094]
[0095]
其中η
j
(p)为p时刻第j个归一化神经元的输出,η(p)=[η1(p),η2(p),
…
,η
k
(p)]
t
是归一化神经元输出矩阵;
[0096]
输出层:该层包括1个神经元,输出为:
[0097]
g(p)=w(p)η(p)
ꢀꢀꢀꢀꢀꢀꢀ
(4)
[0098]
其中g(p)是神经网络的输出值,w(p)=[w1(p),w2(p),
…
,w
k
(p)]是输出权值参数矩阵,w
k
(p)为p时刻第k个归一化神经元的输出权值;
[0099]
(2)训练模糊神经网络,初始p=1,具体为:
[0100]
①
计算模糊神经网络误差:
[0101][0102]
其中g
d
(p)是模糊神经网络的期望输出值;
[0103]
②
参数更新如下:
[0104][0105]
其中c
ij
(p+1)为p+1时刻第i个输入神经元和第j个径向基神经元的中心值,σ
ij
(p+1)为p+1时刻第i个输入神经元和第j个径向基神经元的宽度值,w
j
(p+1)为p+1时刻第j个归一化神经元的输出权值;
[0106]
③
p=p+1,若p<p,则重复步骤
①-②
,若p=p,则结束该循环;
[0107]
(3)二沉池是污水处理运行过程的重要组成部分,调节二沉池模型相关参数获得被控对象的过渡模型,具体为:
[0108]
二沉池模型的双指数污泥沉降速率函数可以描述为:
[0109][0110]
其中v(t)为t时刻污泥沉降速率,v0=474m/d为理论最大沉降速率,r
h
=0.000576m3/g
·
ss为沉降扰动参数,x
z
(t)为t时刻第z层悬浮物浓度,z=1,2,
…
,10;
[0111]
根据不同运行工况建立污泥膨胀发生到恢复正常工况的控制模型:
[0112][0113]
其中其中和分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的变化率,u(t)=[u1(t),u2(t)]
t
,u1(t)和u2(t)分别表示t时刻控制输入变量曝气量和内回流,f
tr
(t)和b
tr
(t)分别为2
×
2的矩阵和2维列向量,tr为划分工况的个数,且tr=1,2,3,t为控制过程的时刻;
[0114]
(4)设计用于污泥膨胀发生后溶解氧浓度和硝态氮浓度的自适应分段滑模控制方法,具体为:
[0115]
初始化三个滑模控制器,每个控制器包括滑模面的计算s
tr
(t)和控制律的求解u
tr
(t)的两部分,t初值设为0;
[0116]
①
计算被控变量溶解氧浓度和硝态氮浓度的偏差:
[0117]
e(t)=x(t)-x
d
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0118]
其中x(t)=[x1(t),x2(t)]
t
,x1(t)和x2(t)分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的实际值,x
d
(t)=[x
1d
(t),x
2d
(t)]
t
,x
1d
(t)和x
2d
(t)分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的期望值;
[0119]
②
获取公式(1)中的水质数据好氧池溶解氧浓度、二沉池污泥负荷率、二沉池混合液悬浮固体浓度、二沉池污泥停留时间和回流比,根据公式(2)-(4)计算该时刻的污泥体积指数;
[0120]
若污泥体积指数介于0到150之间,则执行步骤
③
;
[0121]
若污泥体积指数大于150,小于等于250,则执行步骤
④
;
[0122]
若污泥体积指数大于250,则执行步骤
⑤
;
[0123]
以下步骤
③
、
④
、
⑤
属于平行关系;
[0124]
③
计算控制器的滑模面:
[0125][0126]
其中e(τ)为关于偏差的被积函数,dτ为积分变量τ的微分,k1为2
×
2的矩阵,其副对角线的各元素为0,主对角线的各元素自上而下分别为0.035、0.25;
[0127]
求解控制器的控制律:
[0128][0129]
其中f1(t)和b1(t)为tr=1时f
tr
(t)和b
tr
(t)对应的变量,(t)对应的变量,和分别表示t时刻被控变量溶解氧浓度和硝态氮浓度的期望值的变化率,λ1(t)是t时刻的自适应增益参数,与滑模面的大小有关,可以表示为0.2*√|s1(t)|,始终大于0,√和||分别表示开方运算和绝对值运算,sign()为符号函数,其表达式为:
[0130][0131]
将求解的u1(t)赋给u(t),然后执行步骤
⑥
;
[0132]
④
计算控制器的滑模面:
[0133][0134]
其中k2为2
×
2的矩阵,其副对角线的各元素为0,主对角线的各元素自上而下分别为-0.02、-0.02,ζ2=[0.007,0.007]
t
;
[0135]
求解控制器的控制律:
[0136][0137]
其中f2(t)和b2(t)为tr=2时f
tr
(t)和b
tr
(t)对应的变量,λ2(t)是t时刻的自适应增益参数,与滑模面的大小有关,可以表示为0.2*√|s2(t)|,始终大于0;
[0138]
将求解的u2(t)赋给u(t),然后执行步骤
⑥
;
[0139]
⑤
计算控制器的滑模面:
[0140][0141]
其中k3为2
×
2的矩阵,其副对角线的各元素为0,主对角线的各元素自上而下分别为0.025、0.025,ζ3=[-0.013,-0.013]
t
;
[0142]
求解控制器的控制律:
[0143][0144]
其中f3(t)和b3(t)为tr=3时f
tr
(t)和b
tr
(t)对应的变量,λ3(t)是t时刻的自适应增益参数,与滑模面的大小有关,可以表示为0.2*√|s3(t)|,始终大于0;
[0145]
将求解的u3(t)赋给u(t),然后执行步骤
⑥
;
[0146]
⑥
t=t+1,若t<300,则转到步骤
①
,若t=300,则结束该循环;
[0147]
(5)利用求解的u(t)对溶解氧浓度和硝态氮浓度进行跟踪控制,最终系统的输出为溶解氧的实际浓度值、硝态氮的实际浓度值和预测的污泥体积指数。
[0148]
(5)利用求解的u(t)对溶解氧浓度和硝态氮浓度进行跟踪控制,最终系统的输出为预测的污泥体积指数、溶解氧的实际浓度值和硝态氮的实际浓度值;图2为污水处理运行过程污泥体积指数的预测值,x轴:时间,单位是天,y轴:污泥体积指数预测值,单位是毫升/克,黑色实线为正常工况下污泥体积指数上限,黑色虚线为污泥体积指数预测值;图3显示污水处理过程的溶解氧浓度值,x轴:时间,单位是天,y轴:溶解氧浓度,单位是毫克/升,黑色实线为溶解氧浓度设定值,黑色虚线为溶解氧浓度实际值;图4显示污水处理过程的硝态氮浓度值,x轴:时间,单位是天,y轴:硝态氮浓度,单位是毫克/升,黑色实线为硝态氮浓度设定值,黑色虚线为硝态氮浓度实际值;实验结果证明该方法的有效性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1