一种时延非线性时变系统的有限时间实时控制方法与流程
[0001]
本发明属于带有时延和非线性动态的受扰系统的控制领域,具体涉及一种时延非线性时变系统的有限时间实时控制方法。
背景技术:
[0002]
有限时间控制是控制领域中的一个重要方向,其目的是在指定时间段内将目标状态约束在期望的范围内。在许多实际工程应用中,出于设备安全的考虑,系统状态通常不能超过某些给定值;与此同时,预期的控制效果往往要求在有限时间内完成。鉴于其为完成前述两项任务提供了有效的解决方案,有限时间控制在目标跟踪、火箭发射、机器人控制、化学反应釜温度控制等众多科技行业中得到了广泛的运用。
[0003]
随着计算机和通讯技术的不断发展,基于网络的数据传输得到广泛运用,并在包括有限时间控制在内的自动控制领域受到了越来越多的关注。然而,受制于节点有限的通信资源,网络传输面临着拥堵和丢包(拥堵时间过长导致的一种严重后果)的风险,这种风险本质上属于时延的潜在破坏。与此同时,系统实际运行环境的不确定或恶意攻击者的破坏,使被控系统的运行不得不经受来自外部未知干扰的考验。时延和干扰的存在对系统的控制性能构成了威胁,严重时将导致不必要的经济损失甚至人身危险。此外,现代控制系统的构造往往具有高度的复杂性,其显著表现就是系统动态的非线性特性和系统参数的时变性。以上这些因素都给系统的有限时间控制带来了巨大的挑战。
[0004]
综上所述可知,如何在时延和未知外部扰动同时存在的条件下,针对非线性系统进行有效的控制器设计,从而在指定时间段内将目标的系统状态约束在一个可接受的范围,并达到期望的干扰抑制水平,具有重要的研究价值。
技术实现要素:
[0005]
发明目的:针对现有技术中时延、非线性动态和外部扰动共存的工程背景下,时变系统在给定时间内的状态约束和干扰抑制问题,本发明公开了一种时延非线性时变系统的有限时间实时控制方法,在时延、非线性动态和未知外部扰动同时存在并影响系统性能的情况下,在有限时间内实现预期的状态约束,为时变系统的有限时间控制律的设计提供了理论指导。
[0006]
技术方案:本发明采用如下技术方案:一种时延非线性时变系统的有限时间实时控制方法,其特征在于,包括如下步骤:
[0007]
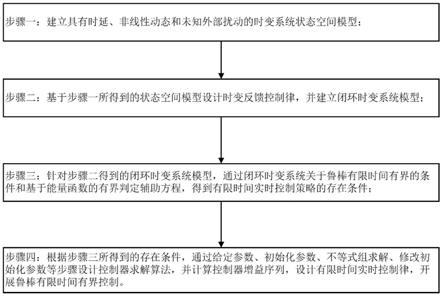
s1、建立具有时延、非线性动态和未知外部扰动的时变系统状态空间模型;
[0008]
s2、基于步骤s1中的时变系统状态空间模型,设计时变反馈控制律,并建立闭环时变系统状态空间模型;
[0009]
s3、针对步骤s2中的闭环时变系统状态空间模型,通过闭环时变系统关于鲁棒h∞有限时间有界的条件和基于能量函数的有界判定辅助方程,得到有限时间实时控制策略的存在条件;
[0010]
s4、根据步骤s3中的存在条件,设计控制器求解算法,并计算反馈控制增益序列,设计有限时间实时控制律,开展鲁棒有限时间有界控制,实现对具有时延、非线性动态和未知外部扰动的时变系统的有限时间实时控制,包括:给定时变系统参数;初始化参数;在给定的时间区间内根据每个时刻的线性矩阵不等式组约束求解,若存在可行解,则将对应时刻的时变反馈控制器增益保存;若不存在可行解,则修改参数,若修改后的参数符合要求则重新求解,直至得到给定的时间区间内所有时刻的反馈控制增益序列,据此设计实时的反馈控制律;若修改后的参数不符合要求则无法设计实时的反馈控制律。
[0011]
优选地,步骤s1中,时变系统状态空间模型如下:
[0012]
x(k+1)=a(k)x(k)+a
d
(k)x(k-τ)+b
p
(k)φ(ξ(k))+b
u
(k)u(k)+b
w
(k)w(k)
[0013]
ξ(k)=c
q
(k)x(k)+c
qd
(k)x(k-τ)+d
p
(k)φ(ξ(k))+d
u
(k)u(k)+d
w
(k)w(k)
[0014]
其中,τ表示系统的时延,x(k)表示系统在k时刻的状态,x(k+1)表示系统在k+1时刻的状态,x(k-τ)表示系统在k-τ时刻的状态;u(k)表示系统的控制输入;w(k)为集合l
2
[0,∞)上的能量受限的外部扰动;φ是非线性动态函数且具有零初始状态φ(0)=0,ξ(k)是非线性动态函数φ在k时刻的输入;a(k),a
d
(k),b
p
(k),b
u
(k),b
w
(k),c
q
(k),c
qd
(k),d
p
(k),d
u
(k),d
w
(k)是系数矩阵,为定常矩阵、满足数学式的时变矩阵或隶属于各元素概率关联的时变矩阵集。
[0015]
优选地,非线性动态函数φ=[φ
1
,φ
2
,
…
,φ
l
]
t
满足如下特性:对满足如下特性:对满足下列公式:
[0016][0017]
其中,l是非线性动态函数φ中包含的子函数的个数。
[0018]
优选地,步骤s2中,设计时变反馈控制律为u(k)=k(k)x(k),其中,k(k)为待设计的时变反馈控制器的增益,k(k)为定常矩阵或时变矩阵,则闭环时变系统状态空间模型如下:
[0019][0020][0021]
其中,
[0022]
优选地,步骤s3中,鲁棒h∞有限时间有界的条件如下:
[0023]
k∈[-τ,0]
[0024][0025]
零初始条件下,其中,c
1
、c
2
、β、r和n都为给定参数,且满足0≤c
1
≤β,c
2
≥0,r>0;z(k)为系统的量测输出,z(k)=c
z
(k)x(k)+d
zw
(k)w(k),c
z
(k)和d
zw
(k)为系数矩阵,为定常矩阵、满足数学式的时变矩阵或隶属于各元素概率关联的时变矩阵集;γ>0为干扰抑制水平;
[0026]
基于能量函数的有界判定辅助方程如下:
[0027][0028]
其中,v(k)为k时刻闭环时变系统的能量函数,其中,v(k)为k时刻闭环时变系统的能量函数,p(k)>0为时变对称能量函数矩阵,γ>0为定常对称能量函数矩阵;α>1为有限时间有界设计参数;
[0029]
有限时间实时控制策略的存在条件如下:
[0030][0031]
σ
1
(k+1)p(k+1)<r<p(k+1)
[0032]
0<γ≤σ
3
r
[0033][0034]
其中,{σ
1
(k+1)}
k=0,1,
…
,n-1
和σ
3
为正标量,{λ(k)}
k=0,1,
…
,n
为对角正定矩阵,{σ
1
(k+1)}
k=0,1,
…
,n-1
、{p(k+1)}
k=0,1,
…
,n-1
和{λ(k)}
k=0,1,
…
,n
为定常矩阵或时变矩阵;*表示对称元素;he{x}=x+x
t
;表示克罗内克积;h=diag{h
1
,
…
,h
l
};i
τ
表示维数为τ的单位矩阵。
[0035]
优选地,步骤s4具体包括:
[0036]
s41、给定时变系统参数,包括:时变矩阵a(k)、a
d
(k)、b
p
(k)、b
u
(k)、b
w
(k)、c
q
(k)、c
qd
(k)、d
p
(k)、d
u
(k)、d
w
(k)、c
z
(k)和d
zw
(k),非线性动态函数φ,时延τ,时变系统的初始状态;
[0037]
s42、初始化参数,包括:鲁棒h∞有限时间有界的参数c
1
、c
2
、β、r和n,以及参数β的变化率δβ>0和最大可允许上界β
max
,有限时间有界设计参数α及其变化率δα>0,时变对称能量函数矩阵的初始状态p(0),正标量初值σ
1
(0),设置k=0;
[0038]
s43、在当前k时刻,在满足如下线性矩阵不等式组约束的情况下,求解σ
1
(k+1)、σ
3
、x(k+1)、γ、s(k)和k(k):
[0039][0040]
σ
1
(k+1)r-1
<x(k+1)<r-1
[0041]
0<γ≤σ
3
r
[0042]
[0043]
如果存在可行解,将当前时刻的时变反馈控制器的增益k(k)保存,然后进入下一时刻,以k+1时刻作为当前时刻,执行步骤s44;如果不存在可行解,执行步骤s45;
[0044]
s44、如果当前时刻k≤n,[0,n]为给定的时间区间,则设置p(k)=x(k)-1
,然后执行步骤s43;否则,求解过程结束,得到反馈控制增益序列{k(k)}
k=0,1,
…
,n
,据此可以设计实时的反馈控制律;
[0045]
s45、在当前α值的基础上减去δα,得到新的有限时间有界设计参数α,如果新的有限时间有界设计参数α小于或等于1,则未找到针对当前初始化参数的可行解,初始化有限时间有界设计参数α,然后执行步骤s46;否则,设置k=0,再执行步骤s43;
[0046]
s46、在当前β值的基础上加上δβ,得到新的参数值β,如果新的参数值β小于或等于最大可允许上界β
max
,则设置k=0,然后执行步骤s43;否则,针对所有可接受的参数未找到可行解,退出。
[0047]
有益效果:本发明具有如下有益效果:
[0048]
本发明提供了一种实时计算方法,充分利用当前时刻的系统和量测信息,降低了离线计算在工程实现上的保守性;在时延、非线性动态和未知外部扰动同时存在并影响系统性能的情况下,本发明在有限时间内实现预期的状态约束;有效降低外部扰动对系统性能的破坏,实现控制效果的鲁棒性;充分运用时延信息,降低了设计条件的保守性;定量揭示时延和外部扰动与有限时间有界性能之间的关系,为时延受扰系统的有限时间控制律的设计提供了理论指导。
附图说明
[0049]
图1为本发明所提方法的总体流程图;
[0050]
图2为本发明步骤s4中求解控制器算法的流程图;
[0051]
图3为实施例1中x
t
(k)rx(k)在有限时间区间[0,20]内的演化轨迹;
[0052]
图4为实施例1中干扰抑制水平γ在有限时间区间[0,20]内的演化轨迹;
[0053]
图5为实施例1中三种不同控制算法(开环控制、有限时间有界控制、鲁棒h∞有限时间有界控制)下系统状态2范数||x||在有限时间区间[0,20]内的演化轨迹;
[0054]
图6为实施例1中有限时间有界控制和鲁棒h∞有限时间有界控制下状态2范数||x||的差值在有限时间区间[0,20]内的演化轨迹;
[0055]
图7为实施例2中x
t
(k)rx(k)在有限时间区间[0,20]内的演化轨迹;
[0056]
图8为实施例2中干扰抑制水平γ在有限时间区间[0,20]内的演化轨迹;
[0057]
图9为实施例2中三种不同控制算法(开环控制、有限时间有界控制、鲁棒h∞有限时间有界控制)下系统状态2范数||x||在有限时间区间[0,20]内的演化轨迹;
[0058]
图10为实施例2中有限时间有界控制和鲁棒h∞有限时间有界控制下状态2范数||x||的差值在有限时间区间[0,20]内的演化轨迹。
具体实施方式
[0059]
下面结合附图对本发明作更进一步的说明。
[0060]
本发明公开了一种时延非线性时变系统的有限时间实时控制方法,如图1所示,具体过程如下:
[0061]
步骤s1、建立具有时延、非线性动态和未知外部扰动的时变系统状态空间模型,形式如下:
[0062][0063]
其中,τ表示系统的时延,表示系统在k时刻的状态,表示系统在k+1时刻的状态,x(k-τ)表示系统在k-τ时刻的状态,n∈n
0
是系统状态的维数;是系统状态的维数;为系统已知的初始状态;表示系统的控制输入,m∈n
0
是系统控制输入的维数;为集合l
2
[0,∞)上的能量受限的外部扰动,s∈n
0
是外部扰动的维数;是非线性动态函数且具有零初始状态φ(0)=0,是非线性动态函数φ在k时刻的输入,l∈n
0
是非线性动态函数φ中包含的子函数的个数;是非线性动态函数φ中包含的子函数的个数;是非线性动态函数φ中包含的子函数的个数;是符合某一变化规律的系数矩阵,需要说明的是,这些矩阵包含以下几种情况:1、作为时变的一种特殊情况,矩阵的参数是定常的;2、矩阵的参数是按照某一数学式确定性随时间变化;3、矩阵的参数取值于各元素概率关联的某一集合,如矩阵参数是受控于一组切换信号或跳变信号的时变值;表示n维欧几里得空间,表示所有n
×
m实矩阵的集合。
[0064]
所用模型中的非线性动态函数φ=[φ
1
,φ
2
,
…
,φ
l
]
t
满足如下特性:对满足如下特性:对满足下列公式:
[0065][0066]
步骤s2、基于步骤s1中所得到的时变系统状态空间模型,设计时变反馈控制律,并建立闭环时变系统状态空间模型。
[0067]
具体设计的时变反馈控制律为:
[0068]
u(k)=k(k)x(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0069]
其中,为待设计的时变反馈控制器的增益。需要说明的是,时变反馈控制律包括以下两类情形:1、作为时变的一种特殊情况,k(k)是定常的;2、k(k)是随时间变化的。
[0070]
将公式(3)的时变反馈控制律代入公式(1),得到闭环时变系统的状态空间模型如下:
[0071][0072]
其中,
[0073]
步骤s3:针对步骤s2中得到的闭环时变系统的状态空间模型,通过闭环时变系统关于鲁棒h∞有限时间有界的条件基于能量函数的有界判定辅助方程,得到有限时间实时控制策略的存在条件。
[0074]
在给定时间区间[0,n]内,如果闭环时变系统的状态x(k)演化过程呈现如公式(5)
所示的规律:
[0075][0076]
其中,c
1
、c
2
、β、r和n都为给定参数,并且满足0≤c
1
≤β,c
2
≥0,r>0,n∈n
0
。
[0077]
同时,若闭环时变系统的量测输出z(k)和非零的外部扰动w(k)在零初始条件下还满足下述关系:
[0078][0079]
那么就称闭环时变系统是关于(c
1
,c
2
,β,r,n)鲁棒h∞有限时间有界的,并且具有衡量值为γ>0的干扰抑制水平,其中||z(k)||
2
和||w(k)||
2
分别表示量测输出和外部扰动的二范数平方。
[0080]
时变系统的量测输出采取如下形式:
[0081]
z(k)=c
z
(k)x(k)+d
zw
(k)w(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0082]
其中,和是系数矩阵,包含以下几种情况:1、作为时变的一种特殊情况,矩阵的参数是定常的;2、矩阵的参数是按照某一数学式确定性随时间变化;3、矩阵的参数取值于各元素概率关联的某一集合,如矩阵参数是受控于一组切换信号或跳变信号的时变值;z∈n
0
是系统量测输出的维数。
[0083]
为确保上述鲁棒h∞有限时间有界性能的成立,构造具有如下形式的有界判定辅助方程:
[0084][0085]
其中,v(k)为k时刻闭环时变系统的能量函数,形式如下;
[0086][0087]
其中,p(k)>0为时变对称能量函数矩阵,γ>0为定常对称能量函数矩阵,γ>0表示干扰抑制水平,α>1表示有限时间有界设计参数。
[0088]
基于上述有界判定辅助方程可以给出闭环时变系统获取鲁棒h∞有限时间有界性能的存在条件如下公式(10)-(13)所示:
[0089][0090]
σ
1
(k+1)p(k+1)<r<p(k+1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0091]
0<γ≤σ
3
r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0092]
[0093]
其中,{σ
1
(k+1)}
k=0,1,
…
,n-1
和σ
3
为正标量,{p(k+1)}
k=0,1,
…
,n-1
和γ为对称正定矩阵,{λ(k)}
k=0,1,
…
,n
为对角正定矩阵,且上述均为待定参数(或矩阵),{σ
1
(k+1)}
k=0,1,
…
,n-1
、{p(k+1)}
k=0,1,
…
,n-1
和{λ(k)}
k=0,1,
…
,n
包括以下两种情形:1、作为时变的一种特殊情况,矩阵的参数是定常的;2、矩阵的参数是随时间变化的;α>1为有限时间有界设计参数,预先设置且可调节;*表示对称元素;he{x}=x+x
t
;表示克罗内克积;h=diag{h
1
,
…
,h
l
}为已知参数,由非线性动态函数的特性决定,h
1
,
…
,h
l
取自公式(2)中,均为大于0的常数;i
τ
表示维数为τ的单位矩阵。
[0094]
步骤s4:根据步骤s3中所得到的存在条件,设计控制器求解算法,并计算控制器增益序列,据此设计有限时间实时控制律,开展鲁棒有限时间有界控制,实现对具有时延、非线性动态和未知外部扰动的时变系统的有限时间实时控制。如图2所示,具体步骤为:
[0095]
步骤s41、给定时变系统参数:a(k)、a
d
(k)、b
p
(k)、b
u
(k)、b
w
(k)、c
q
(k)、c
qd
(k)、d
p
(k)、d
u
(k)、d
w
(k)、c
z
(k)和d
zw
(k);非线性动态函数φ;时延τ;时变系统的初始状态
[0096]
步骤s42、初始化参数c
1
、c
2
、β、r、n、α、δα>0,δβ>0、p(0)、σ
1
(0)以及最大可允许上界β
max
,令k=0。
[0097]
步骤s43、在满足如下公式(14)-(17)所示的线性矩阵不等式组约束的情况下,求解参数σ
1
(k+1)、σ
3
、x(k+1)、γ、s(k)、k(k)。
[0098][0099]
σ
1
(k+1)r-1
<x(k+1)<r-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0100]
0<γ≤σ
3
r
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0101][0102]
其中,x(k+1)=p(k+1)-1
,s(k)为对λ(k)进行某些运算的结果,因此公式(10)与公式(14)是等价的,运用schur补引理和合同变换即可在两者之间实现等价转换;公式(11)与公式(15)也是等价的。
[0103]
如果存在可行解,将当前时刻的反馈控制器的增益k(k)保存到寄存器中,然后设置k=k+1,再执行步骤s44;如果不存在可行解,执行步骤s45。
[0104]
步骤s44、如果k≤n,[0,n]为给定的时间区间,设置p(k)=x(k)-1
,然后执行步骤s43;否则,求解过程结束,得到反馈控制增益序列{k(k)}
k=0,1,
…
,n
,据此可以设计实时的反馈控制律。
[0105]
步骤s45、在当前α值的基础上减去δα,将α-δα作为新的有限时间有界设计参数α。
[0106]
如果新的有限时间有界设计参数α小于或等于1,则未找到针对当前初始化参数c
1
、c
2
、β、r、n以及初始条件p(0)、σ
1
(0)的可行解,此时重新初始化有限时间有界设计参数α,使其与步骤s42中初始化的α值相等,然后执行步骤s46;反之,设置k=0,执行步骤s43。
[0107]
步骤s46、在当前β值的基础上加上δβ,将β+δβ作为新的参数β,如果β≤β
max
,则设置k=0,执行步骤s43;否则,针对所有可接受的参数未找到可行解,退出。
[0108]
本发明所提算法是针对一组特定的参数和初始条件而言的,如果无法找到适合于当前参数集以及初始条件的控制律,那么改变这些参数和初始条件,依然可能找到可行解,从而实现有限时间实时控制;如果所有可以接受的参数和初始条件都试了一遍,依然无解,那么表示无法实现可接受的控制。
[0109]
为验证本发明的有效性,这里采用两个定常系统(时变系统的特殊形式)作为实施例进行说明。
[0110]
实施例1
[0111]
本实施例中为时延系统,采用数值方法进行计算。
[0112]
本实施例中考虑如下系统参数:本实施例中考虑如下系统参数:c
qd
=0
2
×
2
,d
u
=dw=0
2
×
1
,d
zw
=0
2
×
1
,τ=2,c
1
=2,c
2
=1,β=10,r=i
2
×
2
,n=20,υ=i
2
×
2
,γ=2.4,系统初始状态为x(0)=[1.5,1]
t
。
[0113]
根据本发明的方法,可以计算得到有界设计参数和时变反馈控制器的一种可行解如下:
[0114]
α=1.0020,k=[-0.5264-1.5023]。
[0115]
得到的时变反馈控制器的效果如图3至图6所示,其中:图3表示x
t
(k)rx(k)在有限时间区间[0,20]内的演化轨迹;图4表示干扰抑制水平γ在有限时间区间[0,20]内的演化轨迹;图5表示三种不同控制算法(开环控制、有限时间有界控制、本发明中鲁棒h∞有限时间有界控制)下系统状态范数||x||在有限时间区间[0,20]内的演化轨迹;图6表示有限时间有界控制和本发明中鲁棒h∞有限时间有界控制下状态范数||x||的差值在有限时间区间[0,20]内的演化轨迹。
[0116]
图3表明,在所设计的鲁棒h∞有限时间有界控制器的作用下,开环控制下不稳定(图5中开环控制下的运动轨迹可以证明这一点)的时延非线性受扰系统在有限时间成功实现了期望的状态约束。与此同时,图4显示闭环系统已经具备预设水平的干扰抑制能力。从图5和图6可知,在相同条件下,和单纯的有限时间有界控制算法相比,本发明所提的鲁棒h∞有限时间有界控制算法具有更优的状态约束能力,增强了系统控制的鲁棒性。
[0117]
实施例2
[0118]
本实施例中为非时延系统,根据实际系统进行计算。
[0119]
本实施例中考虑离散时间蔡氏电路系统如下:
[0120]
x(k+1)=a
1
x(k)+ζ(k)+a
2
u(k)+a
3
w(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)
[0121]
其中,a
2
=t[3 2 1]
t
,a
3
=t[1 1 1]
t
,ζ(k)=0.5tα
c
(a-b)(|x
1
(k)+1|-|x
1
(k)-1|)[1,0,0]
t
,α
c
=9.1,β
c
=16.5811,μ=0.138033,a=-1.3659,b=-0.7408,t=0.05,时变系统的初始状态为x(0)=[-2.0,2.0,-2.0]
t
。
[0122]
选定参数c
1
=3.5,c
2
=1,β=12,r=i
2
×
2
,n=20,γ=0.6。
[0123]
量测输出模型的参数采用如下值:
[0124][0125]
首先将蔡氏电路系统公式(18)转换为公式(1),然后借助本发明所提的算法可得到有界设计参数和时变反馈控制器的增益的一种可行解如下:
[0126]
α=1.0121,k=[-3.8632
ꢀ-
19.6363 0.5173]
[0127]
得到的鲁棒h∞有限时间有界控制器的效果如图7至图10所示,其中:图7表示x
t
(k)rx(k)在有限时间区间[0,20]内的演化轨迹;图8表示干扰抑制水平γ在有限时间区间[0,20]内的演化轨迹;图9表示三种不同控制算法(开环控制、有限时间有界控制、本发明中鲁棒h∞有限时间有界控制)下系统状态范数||x||在有限时间区间[0,20]内的演化轨迹;图10表示有限时间有界控制和本发明中鲁棒h∞有限时间有界控制下状态范数||x||的差值在有限时间区间[0,20]内的演化轨迹。
[0128]
仿真结果给出了和实施例子1中相同的结论,验证了本发明所提算法的有效性和优越性。需要指出的是,虽然实施例子2所应用的对象是非时延系统,但通过必要的参数变换仍可将本发明所提的算法应用到对其的鲁棒h∞有限时间有界控制器的设计中。这也体现了本发明所提算法相比现有算法更强的通用性,即既可以用于时延系统,也可以用于非时延系统。
[0129]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1