安防巡视预警方法与系统与流程
[0001]
本发明属于安全预警领域,特别是涉及化工厂房、大楼等的安防巡视预警方法与系统。
背景技术:
[0002]
化工安全是世界性难题,国内外化工厂爆炸事故频发,如江苏盐城“3.21化工厂爆炸”事故、中国宿州“5.22”爆炸事故、美国伊利诺伊州化工厂严重爆炸事故、俄罗斯别列兹尼基市氮肥生产化工厂爆炸事故等。目前,化工厂房安防工作以危险点源定期检测、维护为主,不能实时预警。且化工厂房辐射污染大,不适宜人员长时间滞留,安防工作无法全天时开展,漏洞多且效率低,同时还存在人员伤亡隐患。随着电子信息技术和人工智能的发展,智能机器人逐渐可以替代人类来完成高危、繁重的安防巡视预警工作,且能满足全天时、高效工作要求。美国安保公司knightscope近几年研制了多款智能机器人。其中,k1是一款固定式的安保机器人,搭载了金属探测器,能够检测出爆炸物、刀和枪支等危险品,主要部署在机场和车站检查口,用于对人和物品进行扫描检查。k3、k5、k7都是移动式的巡视机器人,可通过gps及激光雷达进行定位导航,装备了监控摄像机和热成像系统,可通过无线网络将前端采集的数据传送到远端的监控室进行显示、存储和分析。新加坡公司otsawdigital研制的o-r3机器人在传统自动驾驶安防机器人的基础上增设了一台侦查无人机,不仅能够侦查入侵者而且还能对入侵者进行追踪。湖南万为智能机器人技术有限公司与国防科技大学联合研制的智能安保机器人anbot可以自主行走、自动避障、自主充电,支持人脸识别与分析,主要应用在政务大厅、机房、商场、机场等场合。万科建筑研究中心发布了代号为“vx-1”的首款万科机器人,支持无线通讯、磁导航、视觉导航、车牌识别等功能,可以为社区和公共场所提供全天候的安全保障。目前,市场上应用的安防巡视机器人及系统大多应用于酒店、机场、小区等场所,对于化工厂房的火灾检测、人员入侵检测、可燃气体检测等安防监控需求,市场上还没有功能齐备的安防巡视预警系统。
技术实现要素:
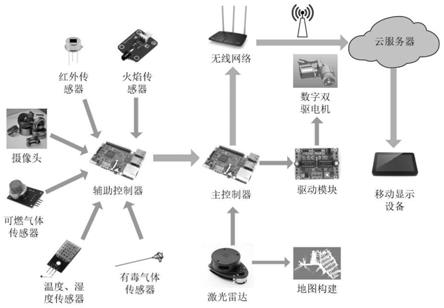
为解决针对化工厂房的火灾检测、人员入侵检测、可燃气体检测等的安防巡视预警问题,本发明特提出专门面向化工厂房安防巡视的预警方法及系统。该系统在自主导航巡视的基础上,集成视觉、红外、火焰、可燃气体、温湿度、有毒气体等多种传感器,可以实现化工厂房的火灾检测、人员入侵检测、可燃气体检测、火灾检测等智能检测和预警,提高化工厂房安防巡视的智能性和便捷性。本发明的安防巡视预警系统包括主控制器、辅助控制器,激光雷达与主控制器连接,主控制器发送导航命令给驱动模块,驱动模块驱动数字双驱电机工作,实现姿态调整等运动;火焰传感器、温度湿度传感器、红外传感器、可燃气体传感器和有毒气体传感器与辅助控制器连接,摄像头与辅助控制器连接。火焰传感器、温度湿度传感器、红外传感器、可燃气体传感器、有毒气体传感器和摄像头将采集的数据传输给辅助控制器,辅助控制器进行处理和
分析,将分析结果和采集数据传输给主控制器。主控制器分析处理后,通过无线网络将信息上传到云服务器,并最终传输到移动显示设备,通过移动显示设备上的app进行显示。所述主控制器接收激光雷达采集的数据,构建地图和进行导航。驱动模块驱动数字双驱电机工作,实现前进、后退、转向姿态调整等运动。系统实现功能如下:1)地图自主构建:装配激光雷达,采用slam算法,可以在未知环境创建详细的地图,具有地图存储和更新功能,便于后续巡检调用地图;2)自主导航规划路线:设计高效的移动控制算法,通过主控制器控制驱动模块,实现自主导航避障,并进行最优路径规划;3)火情检测预警:集成火焰传感器、可燃气体、烟雾和温度,按照最大隶属度方法进行判别最终结果,对发生的火灾不虚警和对隐藏的火情不漏警,及时进行预警;4)可燃及有毒气体检测:甲苯及苯的同系物的爆炸极限为1.2%vol-8%vol,下限为1.2%vol,相当于12000ppm,12000ppm分成100份,每一个1%lel=120ppm,考虑到甲苯气体易爆且有毒,传感器报警点设置为1%lel(120ppm),尽可能防范甲苯浓度进入爆炸界限和防止人员吸入浓度过高的气体。5)异常环境检测:化工厂房存储的生产原料对环境温度湿度的要求严格,一般温度维持在18
°
—26
°
,湿度控制在45—65%,设置温度湿度检测响应区间,若不在这个区间,则对高温、高湿等异常环境进行预警检测。6)人员入侵检测:安装摄像头和红外传感器,可以感知有无人员经过,摄像头视频采用yolo算法进行人员目标识别,实现对非法入侵者的可靠检测及预警;7)可靠信号传输线路:采用无线网络传输模块,能将采集的传感器信号以及拍摄的环境视频信息实时的传送到服务器;8)移动作业平台app:自主设计、开发移动app显示终端,app接入网络后与服务器连接,可以远距离、实时性的把环境信息与报警信息人性化的显示在手机、平板等常用设备上,实现全方位的安全监控。本发明的创新特色如下:1)“全方位环境信息感知”:配备多种传感器,囊括雷达、光学、红外、气体、微小颗粒等多类型传感器,弥补化工厂对单一环境信息的检测,通过多通道检测实现了对环境信息的全方位智能感知。2)“多传感器融合+预警感知”:预警信息相互验证,火焰、气体、温度、烟雾传感器信息最大隶属度判别,做到对发生的火灾不虚警和对隐藏的火情不漏警;视频智能识别与全方位红外传感器融合感知,对非法入侵者进行检测。利用温度湿度传感器、有毒气体传感器、可燃气体传感器的多传感器融合,在辅助控制器上进行温度湿度、气体变化的信息融合,对异常环境信息检测。3)“自主规划路径+自主避障”:激光雷达采用slam算法,构建地图,并在移动过程中根据位置估计和地图进行自身定位,自主选择路线抵达需要巡检的目标点,行进途中主动避开激光雷达能探测到的障碍物。4)“云端服务器传送+移动作业平台综合显示”:安防巡检系统监测的工厂环境信息情况,可以通过设计的云端服务器推送,在移动作业平台进行预警信息综合显示,该移动作业
平台利于化工厂工作人员便携、快速看到预警信息,该设计实现了软件与硬件相结合,具有极大的实践意义和应用价值。
附图说明
[0007]
图1安防巡检系统的结构组成图,图2控制系统架构示意图,图3火灾检测模型,图4可燃、有毒气体以及异常环境检测流程图,图5激光雷达构建地图过程图,图6移动作业端显示界面。
具体实施方式
[0008]
安防巡检系统的作用是为了代替人工自主的完成进行一系列的化工厂安全、巡检任务,因此,安防巡检系统必须具有感知外界环境的功能,这便依赖于多种传感器的信息融合。采用多传感器信息融合技术可以结合多种传感器的功能,取长补短,从而丰富安防巡检系统的功能。本发明设计的安防巡检系统传感器子系统具有传感器数据采集功能,采集各种传感器,主要包括导航信息和环境信息的采集;数据处理功能,将传感器采集的数据信息进行融合,实时传输到app界面显示,完成预警功能。本发明通过设计多传感器融合检测方法实现化工厂房危险事件的预警。安防巡检系统配有不同类型的传感器,以满足探测和数据采集的需要。若各传感器采集的信息进行单独、孤立地处理,不仅会导致信息处理工作量的增加,而且割断了各传感器信息间的内在联系,丢失了信息经有机组合后可能蕴含的有关环境特征,造成信息资源的浪费,甚至可能导致决策失误。因此本发明应用多传感器融合技术,从多信息的视角进行处理及综合,得到各种信息的内在联系和规律,从而剔除无用的和错误的信息,保留正确的和有用的成分,最终实现信息的优化。基于模块化的设计思想,对安防巡检系统控制系统进行总体设计,安防巡检系统控制系统总体设计如图2所示。该控制系统主控制器、辅助控制器,激光雷达与主控制器连接,发送导航命令给驱动模块,驱动模块驱动数字双驱电机工作,实现姿态调整等运动;火焰传感器、温度湿度传感器、红外传感器、可燃气体传感器和有毒气体传感器与辅助控制器连接,摄像头与辅助控制器连接。火焰传感器、温度湿度传感器、红外传感器、可燃气体传感器、有毒气体传感器和摄像头将采集的数据传输给辅助控制器,辅助控制器进行处理和分析,将分析结果和采集数据传输给主控制器。主控制器分析处理后,通过无线网络将信息上传到云服务器,并最终传输到移动显示设备,通过移动显示设备上的app进行显示。安防巡视预警方法,具体包括:(1)基于多传感器信息融合的火灾识别火灾发生时,会产生高温、火光和烟雾等现象,故可使用感温型、感烟型、感光型等多传感器进行探测。当有高温、火光、烟雾产生时,传感器输出信号经放大后,送入控制器,控制器发出警报信号并显示火灾发生的地点。但是任何一种传感器都只能针对火灾中同时出现的多种物理现象中的一种进行监测,难免受环境中某些相似因素的影响,从而可能导致误
报警,几类常用的火灾识别传感器发生误报警的环境因素如表1所示。表1火灾识别传感器的误报警原因传感器类型检测因素检测方式误报警原因温度传感器温度接触温度变化气体传感器co、co2接触还原气体烟雾传感器固体颗粒接触灰尘、水滴、小昆虫火焰传感器辐射光闪烁频率照明、太阳光在化工厂房等对火灾监测严格的场所,为了提高火灾识别的可靠性,安防巡检系统使用温度传感器检测环境温度,并加入紫外光电管火焰传感器和烟雾传感器采集信息,应用多传感器信息融合方法处理各传感器提供的异常信息。使用基于模糊推理的信息融合方法,模型如图3所示。温度湿度传感器、火焰传感器、可燃气体传感器输出信号超出设定阈值时其状态为1,而小于阈值时其状态为0。设a为传感器的集合,各传感器判断火灾有无的可信度矩阵为x=[x
1 x
2 x3],其中,x1为温度传感器,x2为火焰传感器,x3为烟雾传感器;b为火灾可能出现的判决集合,将判决结果分有火灾y1和无火灾y2两种,构成判决矩阵y=[y 1
y2]
t
根据式(1)进行模糊变换得到各判决出现的可能性,即y=x
×
r
a
×
b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)式中,r
a
×
b
为a和b的关系矩阵,其中μ
ij
表示由传感器i推断决策为j的可能性。然后,针对各可能判决,按最大隶属度方法进行选择得出最终结果。判决规则需满足如下两个条件:1)判决结果有最大的隶属度且隶属度必须大于1;2)判决结果的隶属度与其他判决的隶属度值的差必须大于0.5。设定由温度传感器确定有无火灾的隶属度分别为μ
11
=0.5,μ
12
=0.5;由火焰传感器确定有元火灾的隶属度分别为μ
21
=0.7,μ
12
=0.3;由烟雾传感器确定有无火灾的隶属度分别为此μ
31
=0.9,μ
32
=0.1;则基于多传感器模糊融合的判决结果如表2所示。表2火灾识别的融合判决x1x2x3y1y2判决结果00000.1无火灾0010.90.1无火灾0100.70.3无火灾0111.60.4有火灾1000.50.5无火灾1011.40.6有火灾1101.20.8无火灾1112.10.8有火灾
(2)基于多传感器信息融合的非法入侵者识别安防巡检系统主要用于无人或少人区巡逻,还可以检测巡逻区域内是否有非法入侵者的安全威胁。人体都有恒定的体温,一般在37℃左右,会发出10nm左右特定波长的红外线,红外传感器可以检测到人体发射的红外线。当有人在巡逻区域内移动时,红外传感器可感生出电信号。由于一个红外传感器的水平视角约为130
°
,设计将三个红外传感器呈120
°
安装在同一板面上,以全面检测周围的人员活动情况。考虑到传感器的信号幅度小,易受各种热源、光源干扰,以及在环境温度和人体温度接近时,探测和灵敏度下降可能造成短时失灵的情况,对三个热释电传感器的信号进行融合处理,以提高判断准确性。小车在巡逻时,一旦有任意一个红外传感器检测到有异常,小车立刻停止前进,原地转圈扫描,再次获取三个红外传感器的检测结果,使用加权平均法对三个红外传感器的信息进行融合,根据式(2)对三个输出信号进行加权平均,由加权平均值判断是否有非法入侵者闯入,即式中,x
i
为第i个红外传感器的输出信号,w
i
为传感器i的权值,取当加权平均值时,判断有非法入侵者闯入。当安防巡检系统识别出非法入侵人员后,立即通过无线网络向移动作业端发送报警信号,同时利用摄像头对报警地点进行全方位扫描,采用yolov3算法,对入侵者进行识别,并截取存储视频画面,便于取证。通过红外传感器预警信息与视频识别信息进行融合,降低虚警率,实现智能、准确预警,让化工厂房值班人员能对现场情况有直观快速的掌握。(3)可燃、有毒气体以及异常环境检测化工企业出现灾情前,周围环境会有明显的温度湿度变化,严重的会产生大量的易燃、易爆、有毒有害的气体,造成异常环境,对异常环境进行及时且精确的监测和预报是许多化工企业安全生产中的重要一环。由于构成异常环境的因素复杂,对某种单一的因素进行监测有着很多的局限性,所以越来越多的化工企业需要多通道的检测仪器。针对可燃、有毒气体以及温度湿度变化环境检测,对安防巡检系统的异常环境检测模块进行了设计,基于模块化的设计原理,可将整个检测平台分为温度湿度传感器、有毒气体传感器、可燃气体传感器、辅助控制器、主控制器和移动作业端6个模块,温度湿度传感器、有毒气体传感器、可燃气体传感器将采集的信息传输给辅助控制器,辅助控制器将信息处理后,将结果传输给处理主控制器,主控制器移动作业端运动,控制如图4所示。未知环境的建图和导航采用的是激光slam方法。基于激光雷达不受光照影响,具有自动化程度高、数据生成周期短、精度高等特点,其获取到的地面点密度大,尤其是在高程精度方面优势明显。未知环境地图构建与自主导航流程,如所图5所示。在构建的地图中,采用图形匹配的方式确定安防巡检系统的所在位置,在移动过程中根据位置估计和地图进行自身定位,在自身定位的基础上构建增量式地图,实现机器人的自主定位和导航,自主选择路线抵达需要巡检的目标点。巡检途中标注红出与原地图不一
致的障碍物,结合安防巡检系统车身的宽度,自主规划能够使得小车车身通过的优化路线,避开障碍物,完成巡检任务。安防巡检系统移动作业端app使用android语言设计,用于接受云服务器的传感器信息和视频信号,分析处理预警信息(火、人体、可燃气体等),备注发现警情的时间和温度湿度情况,实时拍照取证存档,并且可随时查看历史预警情况,多传感器感知信息通过http协议的jason格式传输,云服务器实时推送信息至移动作业端。视频传输采用当前比较好用的ijkplayer框架视频播放,并且优化缓存问题,确保移动作业端能够更直观呈现巡检车感知环境的情况。移动作业端显示界面如图6所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1