基于线性霍尔的控制力矩陀螺外框转速和位置控制方法与流程
1.本发明涉及永磁同步电机领域,特别涉及一种基于线性霍尔的控制力矩陀螺外框转速和位置控制方法。
背景技术:
2.使用永磁同步电机的控制力矩陀螺外框转速和位置控制系统中,一般采用全桥式驱动电路来控制电机三相绕组电流的导通和关断,从而改变磁场实现对转速和位置的控制。为了实现对控制力矩陀螺外框转速和位置的高精度控制,需要实时采集控制力矩陀螺外框永磁同步电机转子位置和速度信息,利用这些反馈信息实现对电机定子电流大小、方向的控制。现有的永磁同步电机控制中,转子的位置、速度检测一般通过高精度的绝对式光电编码器或感应同步器来实现,控制装置结构庞大复杂。
技术实现要素:
3.本发明的目的是提供一种基于线性霍尔的控制力矩陀螺外框转速和位置控制方法,以解决现有永磁同步电机中,电机转子的位置和速度的检测方法效率不够高的问题。
4.为了达到上述目的,本发明提供了一种基于线性霍尔的控制力矩陀螺外框转速和位置控制方法,其特征在于,包括:将第一线性霍尔传感器、第二线性霍尔传感器、第三线性霍尔传感器空间120
°
对称安装于控制力矩陀螺外框永磁同步电机的定子上;将线性霍尔传感器输出转化为数字信号,并减去电枢磁场干扰项后通过查表得到永磁同步电机转子位置信息的位置计算器;将控制力矩陀螺外框位置指令与永磁同步电机转子位置信息作差运算的第一减法器;根据所述第一减法器的输出形成控制力矩陀螺外框转速控制指令的位置控制器;固定间隔时间的永磁同步电机转子位置信息作差运算得到永磁同步电机转速信息的转速计算器;将位置控制器得到的永磁同步电机转速控制指令与永磁同步电机转子转速信息作差运算的第二减法器;根据所述第二减法器的输出形成永磁同步电机转矩电流命令的转速控制器;将所述转矩电流命令与三相逆变器输出的相电流采样值作差运算的第三减法器;根据所述第三减法器的输出形成定子电压控制命令的电流控制器;所述定子电压控制命令通过pwm输出机输出到三相逆变器;位置计算器通过ad采样第一线性霍尔传感器、第二线性霍尔传感器、第三线性霍尔传感器模拟量计算得到的永磁同步电机转子转速信息,并输出到转速计算器。
5.优选地,所述的控制方法包含以下步骤:步骤(1),检测三个线性霍尔传感器的输出;步骤(2),根据三个线性霍尔传感器的输出得到控制力矩陀螺外框永磁同步电机的位置和角速度测量信息;步骤(3),将永磁同步电机的位置和角速度测量信息代入到位置环与速度环中进行计算,实现控制力矩陀螺外框转速和位置控制。
6.优选地,第一线性霍尔传感器的输出u1、第二线性霍尔传感u2、第三线性霍尔传感的输出u3为:
[0007][0008]
式中,k=k
h
i
h
b
m
为气隙磁场基波霍尔电势幅值;k
h
为线性霍尔传感器的霍尔电势系数,单位为v/(a
·
t);i
h
为霍尔传感器的励磁电流,单位为a;b
m
为被敏感气隙磁场的磁感应强度峰值,单位为t;θ=ωk为永磁同步电机转子k时刻所在位置的电气角,ω为永磁同步电机转子角速度,单位为rad/s。
[0009]
优选地,永磁同步电机转子角速度测量信息为式中,ω(k)为第k时刻的永磁同步电机转子速度,单位rad/s;θ(k)为第k时刻的永磁同步电机转子位置,单位为rad;δt为速度采样周期,单位为s;k表示速度采样时刻。
[0010]
优选地,上述方法还包括:通过对电枢磁场进行仿真,找到干扰最小的点,作为第一线性霍尔传感器、第二线性霍尔传感器、第三线性霍尔传感器的安装位置。
[0011]
与现有技术相比,本发明具有以下有益效果:
[0012]
(1)本发明减去电枢磁场干扰项后通过查表得到永磁同步电机转子位置信息的位置计算器,有利于提高控制精度,实现线性霍尔传感器对控制力矩陀螺外框转速和位置的控制。
[0013]
(2)对电枢磁场进行仿真,找到干扰最小的点,作为线性霍尔传感器的安装位置,有利于提高控制精度。
[0014]
(2)和传统控制力矩陀螺外框转速和位置控制设计上所使用的光电编码器或感应同步器相比,采用三相线性霍尔传感器完成控制力矩陀螺外框位置和速度测量的方法结构简单、节约成本。
[0015]
(3)采用基于线性霍尔的控制力矩陀螺外框转速和位置控制方法,可以有效减小控制力矩陀螺外框体积、尺寸,有利于控制力矩陀螺的减重和小型化。
附图说明
[0016]
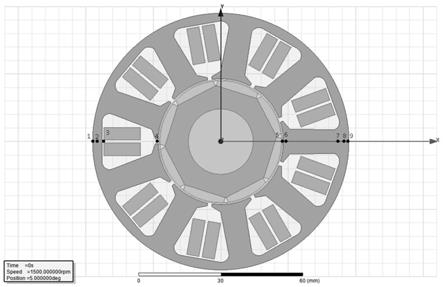
图1是本发明所应用验证电机的三相绕组排列与线性霍尔安装示意图。
[0017]
图2是本发明所应用验证电机的霍尔安装点信号波形仿真图。
[0018]
图3是本发明霍尔安装点电枢磁感应强度波形示意图。
[0019]
图4是本发明霍尔安装点永磁磁感应强度波形示意图。
[0020]
图5是本发明从合成磁场中分离电枢磁场并计算永磁同步电机转子位置流程图。
[0021]
图6是本发明解码得到的转子角度示意图。
[0022]
图7是本发明解码得到的转子角度误差示意图。
[0023]
图8是本发明基于线性霍尔编码器的控制力矩陀螺外框转速和位置控制方法框图。
具体实施方式
[0024]
以下结合附图和实施例对本发明的技术方案做进一步的说明。
[0025]
通过对线性霍尔传感器输出信号进行检测,可以实现电机启动、电流换向、转子位
置和速度信息反馈。
[0026]
本发明的方法包括将线性霍尔传感器输出转化为数字信号,并减去电枢磁场干扰项后通过查表得到理想的永磁同步电机转子位置信息的位置计算器。查表是指在电机有干扰前将干净的信号列一张表,电机运行后会存在干扰,在电机运行时检测到的信号为电机无干扰时产生的信号及干扰信号的组合,通过芯片自动化将实际检测到的信号与表上的信息进行比对,以去掉干扰项,将去掉干扰项后的信号重新与表上的信息进行比对,避免去掉干扰项后的信号误差过大,确保获得准确的电机转子位置信息。
[0027]
本发明的方法包括以下步骤:
[0028]
步骤(1),检测三个线性霍尔传感器的输出;
[0029]
步骤(2),根据三个线性霍尔传感器的输出得到控制力矩陀螺外框永磁同步电机的位置和角速度测量信息;
[0030]
步骤(3),将永磁同步电机的位置和角速度测量信息代入到位置环与速度环中进行计算,实现控制力矩陀螺外框高精度转速和位置控制。
[0031]
如图1所示,本发明提供的基于线性霍尔的控制力矩陀螺外框转速和位置控制方法包括:第一线性霍尔传感器、第二线性霍尔传感器、第三线性霍尔传感器以及永磁同步电机;三个线性霍尔传感器空间120
°
对称安装于永磁同步电机的定子上;线性霍尔安装位置通过仿真分析获得最佳安装的九个检测点分布如图1,依次为定子窄轭外边缘1;定子窄轭中心2;定子槽底3;定子槽口4;定子齿与转子间气隙5;定子齿端中心6;定子齿于定子轭相连处7;定子宽轭中心8;定子宽轭外边缘9。对上述九个点处的磁感应强度按径向/切向和永磁磁场/电枢磁场分类作有限元仿真。
[0032][0033]
对九个霍尔安装点处的电枢磁场进行仿真,结果如图2所示。通过比较三组安装位置,选取d1,d4,d7处作为第一线性霍尔传感器、第二线性霍尔传感器、第三线性霍尔传感器安装位置。
[0034]
d1,d4,d7处合成磁场强度如图2所示,合成磁场强度由永磁同步电机运转时的永磁磁场和电枢磁场叠加而成,从合成磁场中分离电枢磁场后的磁场理论上为永磁磁场,为计算永磁同步电机转子位置的必要信息。d1,d4,d7电枢磁感应强度如图3所示,d1,d4,d7永磁磁感应强度如图4所示。从合成磁场中分离电枢磁场并计算永磁同步电机转子位置流程如图5所示。
[0035]
如图6、图7所示,分别给出了解码得转子角度和转子角度误差。
[0036]
如图8所示,给出了控制力矩陀螺外框转速和位置高精度驱动框图。
[0037]
综上所述,本发明将线性霍尔传感器安装于控制力矩陀螺外框永磁同步电机的定子上,并提供线性霍尔传感器对控制力矩陀螺外框转速和位置高精度控制的方法,解决了
现有永磁同步电机中电机转子的位置和速度的检测方法效率不够高的问题,实现了控制力矩陀螺的减重和小型化。
[0038]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1