一种基于BS架构的MES数据采集与发布系统的制作方法
一种基于bs架构的mes数据采集与发布系统
技术领域
[0001]
本发明涉及bs架构技术领域,具体为一种基于bs架构的mes数据采集与发布系统。
背景技术:
[0002]
mes系统是一套面向制造企业车间执行层的生产信息化管理系统。mes可以为企业提供包括制造数据管理、计划排程管理、生产调度管理、库存管理、质量管理、人力资源管理、工作中心/设备管理、工具工装管理、采购管理、成本管理、项目看板管理、生产过程控制、底层数据集成分析、上层数据集成分解等管理模块,为企业打造一个扎实、可靠、全面、可行的制造协同管理平台。
[0003]
在大数据时代,mes数据采集与发布的环节尤为重要,现在大多数高端制造企业车间管理者需要了解车间内的大多数情况,由于车间较大且车间与车间之间存在一定的距离,管理者无法掌握第一手车间内部信息以及人员无法第一时间汇报工作等问题。因此,提出一种基于bs架构的mes数据采集与发布系统。
技术实现要素:
[0004]
本发明的目的在于提供一种基于bs架构的mes数据采集与发布系统,以解决上述背景技术中提出由于车间较大且车间与车间之间存在一定的距离,管理者无法掌握第一手车间内部信息以及人员无法第一时间汇报工作的问题。
[0005]
为实现上述目的,本发明提供如下技术方案:一种基于bs架构的mes数据采集与发布系统,包括:
[0006]
采集模块,所述采集模块包括机器人本体,所述机器人本体上固定安装有所述温度传感器和所述湿度传感器,所述机器人本体内固定安装有挡板,所述挡板上表面上固定安装有第一电机和plc控制器,所述第一电机的传动轴上固定安装有支撑板,所述支撑板上固定安装有所述全景环视摄像头,所述全景环视摄像头活动安装在所述机器人本体顶部,所述挡板下表面上固定安装有第二电机,所述第二电机的传动轴转动安装在转向器内,所述转向器的两侧转动安装有转向轮,所述机器人本体内底部上固定安装有驱动电机,所述驱动电机的两端转动安装有驱动轮,所述机器人本体的侧壁上贯穿安装有所述微摄像头,所述机器人本体上固定安装有传声麦克风,所述机器人本体的一侧上固定安装有传声器;
[0007]
发布模块,所述发布模块为显示屏。
[0008]
通过采用上述技术方案,采集模块通过微摄像头、温度传感器、全景环视摄像头和湿度传感器所采集的数据信息通过局域网传递到bs架构的客户端上,在经过bs架构的客户端传递到发布模块供车间管理者实时掌握车间生产状况,能够掌握车间内部的第一手信息,以及通过传声器和传声麦克风的配合实时问话和汇报工作。
[0009]
优选的,所述微摄像头设置有4个,分别位于所述机器人本体的4个侧壁上。
[0010]
通过采用上述技术方案,4个微摄像头能够观察到机器人本体四周的图像信息,并能够避免机器人本体与周围物品碰撞。
[0011]
优选的,所述驱动电机为轮毂电机。
[0012]
通过采用上述技术方案,轮毂电机是传动系统、刹车系统集成到一起而设计出来的电机。
[0013]
优选的,所述电动推杆的电控输入端通过导线与所述plc控制器的电控输出端连接,所述plc控制器的电控输出端通过导线与所述第一电机的电控输入端连接。
[0014]
通过采用上述技术方案,plc控制器能够控制电动推杆的上下升降,能够为全景环视摄像头提供不同的摄像高度,plc控制器能够控制带动第一电机的旋转角度以及速度,能够为全景环视摄像头提供不同的摄像视角。
[0015]
优选的,所述驱动电机的电控输入端通过导线与所述plc控制器的电控输出端连接,所述plc控制器的电控输出端通过导线与所述第二电机的电控输入端连接。
[0016]
通过采用上述技术方案,plc控制器能够控制驱动电机转动,并带动驱动轮前进或后退,进而驱动机器人本体的亲近或后退,plc控制器控制第二电机的转动,第二电机与转向器传动连接,可以驱动转向轮的导向角度,在驱动轮的驱动下机器人本体通过转向轮可以行进到不同的方向运动。
[0017]
优选的,所述传声器为传声喇叭。
[0018]
通过采用上述技术方案,管理者通过传声器将声音传递到车间。
[0019]
与现有技术相比,本发明的有益效果是:
[0020]
使用时,机器人本体上的微摄像头和全景环视摄像头将图像信息通过局域网传递到显示屏上,供车间企业管理者来观察车间内的生产工作情况,温度传感器和湿度传感器将生产车间的生产环境信息通过局域网传递到显示屏上显示,让管理者能够掌握第一手车间内部信息,以及管理者和车间工人可以通过传声器和传声麦克风的配合实时问话和汇报工作。
附图说明
[0021]
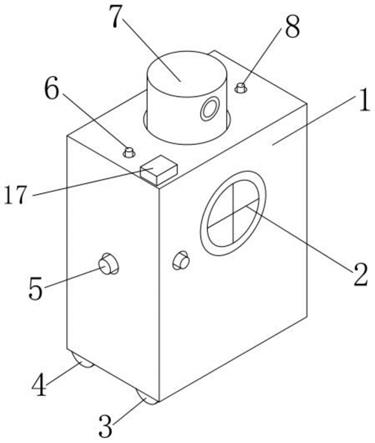
图1为本发明的结构示意图;
[0022]
图2为本发明的剖面结构示意图;
[0023]
图3为本发明的另一剖面结构示意图;
[0024]
图4为本发明的b/s架构框图;
[0025]
图5为本发明的plc控制器的连接框图。
[0026]
图中:1、机器人本体;2、传声器;3、驱动轮;4、转向轮;5、微摄像头;6、温度传感器;7、全景环视摄像头;8、湿度传感器;9、电动推杆;10、第一电机;11、挡板;12、驱动电机;13、支撑板;14、第二电机;15、转向器;16、plc控制器;17、传声麦克风。
具体实施方式
[0027]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0028]
请参阅图1-图4,本发明提供一种技术方案:
[0029]
如图1和图4所示,一种基于bs架构的mes数据采集与发布系统,包括:
[0030]
采集模块,采集模块包括机器人本体1,机器人本体1上固定安装有温度传感器6和湿度传感器8,机器人本体1内固定安装有挡板11,挡板11上表面上固定安装有第一电机10和plc控制器16,第一电机10的传动轴上固定安装有支撑板13,支撑板13上固定安装有全景环视摄像头7,全景环视摄像头7活动安装在机器人本体1顶部,挡板11下表面上固定安装有第二电机14,第二电机14的传动轴转动安装在转向器15内,转向器15的两侧转动安装有转向轮4,机器人本体1内底部上固定安装有驱动电机12,驱动电机12的两端转动安装有驱动轮3,机器人本体1的侧壁上贯穿安装有微摄像头5,机器人本体1上固定安装有传声麦克风17,机器人本体1的一侧上固定安装有传声器2。
[0031]
发布模块,发布模块为显示屏。
[0032]
通过采用上述技术方案,通过采用上述技术方案,采集模块通过微摄像头5、温度传感器6、全景环视摄像头7和湿度传感器8所采集的数据信息通过局域网传递到bs架构的客户端上,在经过bs架构的客户端传递到发布模块显示屏(或平板电脑)供车间管理者实时掌握车间生产状况,让管理者能够掌握第一手车间内部信息,以及管理者和车间工人可以通过传声器2和传声麦克风17的配合实时问话和汇报工作。
[0033]
如图1所示,微摄像头5设置有4个,分别位于机器人本体1的4个侧壁上。
[0034]
通过采用上述技术方案,4个微摄像头5能够观察到机器人本体1四周的图像信息,并能够避免机器人本体1与周围物品碰撞。
[0035]
如图2所示,驱动电机12为轮毂电机。
[0036]
通过采用上述技术方案,轮毂电机是传动系统、刹车系统集成到一起而设计出来的电机。
[0037]
如图5所示,电动推杆9的电控输入端通过导线与plc控制器16的电控输出端连接,plc控制器16的电控输出端通过导线与第一电机10的电控输入端连接。
[0038]
通过采用上述技术方案,plc控制器16能够控制电动推杆9的上下升降,能够为全景环视摄像头7提供不同的摄像高度,plc控制器16能够控制带动第一电机10的旋转角度以及速度,能够为全景环视摄像头7提供不同的摄像视角。
[0039]
如图5所示,驱动电机12的电控输入端通过导线与plc控制器16的电控输出端连接,plc控制器16的电控输出端通过导线与第二电机14的电控输入端连接。
[0040]
通过采用上述技术方案,plc控制器16能够控制驱动电机12转动,并带动驱动轮3前进或后退,进而驱动机器人本体1的亲近或后退,plc控制器16控制第二电机14的转动,第二电机14与转向器15传动连接,可以驱动转向轮4的导向角度,在驱动轮3的驱动下机器人本体1通过转向轮4可以行进到不同的方向运动。
[0041]
如图1所示,传声器2为传声喇叭。
[0042]
通过采用上述技术方案,管理者通过传声器2将声音传递到车间。
[0043]
结构原理:如图1-图3所示,采集模块包括机器人本体1,机器人本体1上固定安装有温度传感器6和湿度传感器8,挡板11上表面上固定安装有第一电机10和支撑板13,支撑板13上固定安装有全景环视摄像头7,全景环视摄像头7活动安装在机器人本体1顶部,挡板11下表面上固定连接有第二电机14,第二电机14的传动轴转动安装在转向器15内,转向器15的两侧转动安装有转向轮4,机器人本体1内底部上固定安装有驱动电机12,驱动电机12
的两端转动安装有驱动轮3,机器人本体1的侧壁上贯穿安装有微摄像头5,机器人本体1上固定安装有传声麦克风17,机器人本体1的一侧上固定安装有传声器2。
[0044]
如图1-图4所示,使用时,机器人本体1上的微摄像头5和全景环视摄像头7将图像信息通过局域网传递到显示屏(或平板电脑)上,供车间企业管理者来观察车间内的生产工作情况,温度传感器6和湿度传感器8将生产车间的生产环境干湿度、温度信息通过局域网传递到显示屏上显示,管理者能够掌握第一手车间内部信息,以及管理者和车间工人可以通过传声器2和传声麦克风17的配合实时问话和汇报工作,在生产车间可以通过远程操控传声器2来驱动电动推杆9、第一电机10、驱动电机12和第二电机14,电动推杆9带动全景环视摄像头7上线升级拍摄不同高度的图像信息,第一电机10带动电动推杆9旋转拍摄不同角度的图像信息,驱动电机12驱动驱动轮3前后运动,机器人本体1能够在生产车间内自由移动,第二电机14与传动连接转向器15,能够驱动转向轮4,在驱动轮3的驱动下机器人本体1通过转向轮4可以行进到不同的方向运动。
[0045]
本发明中未涉及部分均与现有技术相同或可采用现有技术加以实现。尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1