控制装置以及控制系统的制作方法
控制装置以及控制系统
1.本申请是2017年12月12日提交的、申请号为2017113212543、名称为“控制装置以及控制系统”的发明申请的分案申请。
技术领域
2.本发明涉及一种具有传感器数据的时刻同步功能的控制装置以及控制系统。
背景技术:
3.随着iot(internet of things:物联网)在生产现场的普及,分析从传感器收集到的大量传感器数据的必要性增高。为了适当地分析收集到的传感器数据,需要传感器数据间的时刻同步、传感器数据与设备动作模式等其他信息进行关联。但是,现有的plc(programmable logic controller:可编程逻辑控制器)、ad转换器等连接传感器的现有设备(以下也将其称为“传感器接口装置”)大多数例如不与由ieee1588标准规定的一般的时刻同步功能对应。
4.关于这点,专利文献1公开了传感器接口装置与外部的同步信号同步地采样传感器值的技术。另外,专利文献2公开一种技术,使进行以一定时间间隔重复动作状态和休止状态的间歇动作的多个传感器节点间的时刻同步。
5.专利文献1:日本特开2015
‑
076805号公报
6.专利文献2:日本特开2010
‑
016576号公报
技术实现要素:
7.但是,在专利文献1以及专利文献2所公开的技术中需要将同步功能组入到传感器接口装置自身中。因此,需要按照特别的方式制造传感器接口装置自身,有可能会损害传感器接口装置的通用性。另外,如果特别是与传感器数量的增加成比例,按照特别方式的传感器接口装置的数量或规模变大,这些会需要额外的成本。
8.因此本发明的目的为,提供一种即使是在使用了普通的传感器接口装置的情况下也能够实施传感器数据的时刻同步的控制装置以及控制系统。
9.(1)本发明的第一控制装置为从传感器接口装置(例如后述的传感器接口装置500)接收传感器数据相关的信息的控制装置(例如后述的控制装置100、200),具备:定时信号生成部(例如后述的定时信号生成部130),其生成定时信号;附加信息生成部(例如后述的附加信息生成部140),其生成与上述定时信号同步的附加信息;以及输出部(例如后述的串行信号输出部150),其将上述定时信号以及上述附加信息输出给上述传感器接口装置。
10.(2)在(1)记载的控制装置中,上述输出部可以将上述定时信号以及上述附加信息转换为串行信号并输出。
11.(3)在(2)记载的控制装置中,上述输出部具备:定时信号输出部(例如后述的定时信号输出部160),其输出上述定时信号;以及附加信息输出部(例如后述的附加信息输出部170),其输出上述附加信息。
12.(4)本发明的控制系统(例如后述的控制系统10)具备(1)~(3)的控制装置(例如后述的控制装置100、200)、传感器接口装置(例如后述的传感器接口装置500)以及附加信息解码装置(例如后述的附加信息解码装置700),上述控制装置将上述定时信号以及上述附加信息发送给上述传感器接口装置,上述传感器接口装置将传感器数据和上述定时信号以及上述附加信息进行采样并发送给上述附加信息解码装置,上述附加信息解码装置可以从上述传感器接口装置接收上述传感器数据和上述定时信号以及上述附加信息,并将上述附加信息进行解码。
13.(5)在(4)记载的控制系统中,上述控制装置(例如后述的控制装置100、200)和上述附加信息解码装置(例如户数的附加信息解码装置700)可以成为一体。
14.(6)本发明的第二控制装置(例如后述的控制装置100、200)是从传感器接口装置(例如后述的传感器接口装置500)接收传感器数据相关的信息的控制装置,具备:定时信号生成部(例如后述的定时信号生成部130),其生成定时信号;附加信息生成部(例如后述的附加信息生成部140),其生成与上述定时信号同步的附加信息;输出部(例如后述的串行信号输出部150),其将上述定时信号以及上述附加信息输出给上述传感器接口装置;以及附加信息解码部(例如后述的附加信息解码部180),其将从上述传感器接口装置接收到的上述附加信息进行解码。
15.根据本发明,即使是在使用了普通的传感器接口装置的情况下也能够实施传感器数据的时刻同步。
附图说明
16.图1是表示本发明的动作的概要的图。
17.图2是表示本发明第一实施方式的控制装置的结构例的图。
18.图3是表示本发明第一实施方式的串行信号输出部的结构例的图。
19.图4是表示本发明第一实施方式的控制系统的结构例的图。
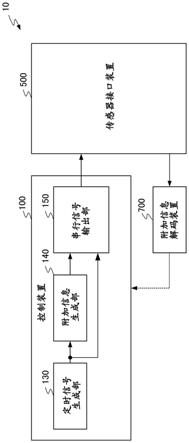
20.图5是表示本发明第二实施方式的控制装置的结构例的图。
21.附图标记的说明
22.10、20、50:控制系统、100、200:控制装置、130:定时信号生成部、140:附加信息生成部、150:串行信号输出部、160:定时信号输出部、170:附加信息输出部、180:附加信息解码部、500:传感器接口装置、700:附加信息解码装置。
具体实施方式
23.以下,参照图1~图5详细描述本发明的实施方式。
24.[动作的概要]
[0025]
图1表示本发明实施方式的动作的概要。
[0026]
图1中,控制系统50具备控制装置100、传感器接口装置500、传感器550a~550c。另外,控制装置100具备输出端口110以及输入端口120。传感器接口装置500具备输出端口510以及输入端口520a~520d。传感器550a与传感器接口装置500的输入端口520a连接,传感器550b与输入端口520b连接,传感器550c与输入端口520c连接。另外,控制装置100的输出端口110与传感器接口装置500的输入端口520d连接。传感器接口装置500的输出端口510与控
制装置100的输入端口120连接。另外,图1中传感器的个数为3个,但是本发明的实施方式不限于此。
[0027]
在控制系统50中,首先如(1)所示,控制装置100将定时信号ts、与定时信号ts的启动同步的附加信息ai作为串行信号输出给传感器接口装置500。该结果为从控制装置100向传感器接口装置500所具备的多个输入端口520a~520d的任意一个(图1的例子中为输入端口520d)输入定时信号ts以及附加信息ai。
[0028]
(2)中,传感器接口装置500可以按照固定间隔周期(1毫秒等)经常进行采样,另外也可以将从控制装置100接收到的定时信号ts作为触发开始采样。后者的情况下,也可以按照固定间隔周期采样固定数量。
[0029]
(3)中,控制装置100从传感器接口装置500接收传感器数据sd和定时信号ts以及附加信息ai。
[0030]
上述的附加信息ai例如能够具有时刻信息、设备的动作模式(主轴的加速时、固定时速以及减速时、切削时等)相关的信息。另外,上述的控制装置100例如也可以是数值控制装置和机器人控制器。进一步,与图1不同,也可以通过与控制装置100不同的另外的装置例如pc等接收传感器数据sd以及附加信息ai,通过pc使用传感器数据以及附加信息。
[0031]
[第一实施方式]
[0032]
图2表示第一实施方式的控制装置100的结构例。如图2所示,控制装置100具备定时信号生成部130、附加信息生成部140、串行信号输出部150。
[0033]
定时信号生成部130是按照固定的时间间隔生成脉冲信号的电路或软件,将所生成的脉冲信号作为定时信号发送给附加信息生成部140和串行信号输出部150。
[0034]
附加信息生成部140将接收到定时信号的情况作为触发,生成时刻信息等的附加信息,发送给串行信号输出部150。
[0035]
串行信号输出部150将从定时信号生成部130接收到的定时信号和从附加信息生成部140接收到的附加信息转换为串行信号,并发送给传感器接口装置500。该串行信号输出部150的结构例如图3所示。
[0036]
如图3所示,串行信号输出部150具备并行/串行转换部151、编码部152以及数字信号输出部153。
[0037]
并行/串行转换部151将从定时信号生成部130接收到的定时信号和从附加信息生成部140接收到的附加信息从并行信号转换为串行信号,并发送给编码部152。
[0038]
编码部152将从并行/串行转换部151接收到的串行信号进行编码。编码的目的为例如将时钟信息传送给数据接收侧,对数据附加错误检测和订正能力。
[0039]
具体地说,例如编码部152为了将时钟信息传送给数据接收侧,在各个数据的前后附加开始位以及停止位,为了检测错误附加奇偶位。
[0040]
更详细地说,编码部152为了取得位同步,在各个数据(例如8位的数据)的前后附加开始位(例如“0”)和停止位(例如“1”)并送出,另一方面当送出的字符数据不存在时,连续送出停止位。
[0041]
在各个数据的传送开始前,连续送出停止位的“1”,但是如果开始各个数据(会包括奇偶位)的传送,则送出开始位的“0”。在数据接收侧经常监视该“1
”→“
0”的变化,识别该变化,则数据接收侧识别出发送了各个数据。并且,数据接收侧从开始位的下一个位开始顺
序地读取信息,在读取了各个数据部分的8位的信息后,确认下一个位是停止位并结束各个数据部分的读取。
[0042]
此时,数据发送侧和数据接收侧最初商量1秒钟会通信几个位,与相互自发产生的时钟同步并进行各个数据的接收发送,数据发送侧和数据接收侧以相同的同步进行“起止”。
[0043]
本发明中,通过使用这种起止同步方式能够不需要设置同步用的信号线而将串行信号输出部所输出的数据通过附加信号解码装置进行解码。另外,例如日本特开2007
‑
123988号公报中公开的技术中举例有作为能够接收高速的位数据的起止同步方式。
[0044]
数字信号输出部153将从编码部152接收到的编码后的串行信号作为数字信号输出(发送)给传感器接口装置500。
[0045]
控制装置100具有上述图2以及图3所示的结构,从而将定时信号和与定时信号的启动同步的附加信息作为串行信号输出给传感器接口装置500。
[0046]
图4是表示具备上述控制装置100的控制系统10的结构。控制系统10除了控制装置100、传感器接口装置500还具备附加信息解码装置700。
[0047]
如上所述,控制装置将定时信号和与定时信号的启动同步的附加信息作为串行信号输出给传感器接口装置500。
[0048]
传感器接口装置500将传感器数据和上述串行信号进行采样并发送给附加信息解码装置700。另外,作为传感器接口装置500的采样定时,考虑例如经常进行采样的情况和使用定时信号决定定时的方法。
[0049]
附加信息解码装置700根据从传感器接口装置500接收到的串行信号进行定时信号的变化点检测和附加信息的解码,将解码后的附加信息与定时信号的变化点的定时的传感器数据关联。这里,定时信号的变化点考虑以下几个情况,例如a)定时信号从高到低变化的点、b)定时信号从低到高变化的点、c)定时信号的系列从idle代码变化为sync代码的点等。
[0050]
[第一实施方式的效果]
[0051]
通过使用第一实施方式的控制装置100,输出与定时信号同步的附加信息,由此能够对普通的传感器接口装置的传感器数据附加同步性高的附加信息,并能够实施时刻同步。具体地说,例如通过取得特定动作模式时的传感器数据而能够实现主轴的故障预测等。
[0052]
[第二实施方式]
[0053]
图5表示第二实施方式的控制装置200的结构例。另外,对和第一实施方式的控制装置100相同的结构要素使用相同的标记来表示,省略其说明。
[0054]
控制装置200具备定时信号生成部130、附加信息生成部140、定时信号输出部160以及附加信息输出部170。
[0055]
在第一实施方式中,一个串行信号输出部150接收由定时信号生成部130所生成的定时信号、由附加信息生成部140所生成的附加信息。另一方面,在第二实施方式中,定时信号输出部160接收由定时信号生成部130所生成的定时信号,并发送给传感器接口装置500。另一方面,附加信息输出部170接收由附加信息生成部140所生成的附加信息,并发送给传感器接口装置500。即,在第二实施方式的控制装置200中,单独对传感器接口装置500发送定时信号和附加信号。
[0056]
另外,省略了图示,但是附加信息输出部170与第一实施方式的控制装置100所具备的串行信号输出部150同样,能够具备并行/串行转换部151、编码部152以及数字信号输出部153。
[0057]
另外,虽然省略了图示,但是与第一实施方式的控制系统10同样,除了控制装置200,还能够使用传感器接口装置500以及附加信号解码装置700来构成第二实施方式的控制系统20。
[0058]
[第二实施方式的效果]
[0059]
如上所述,在第二实施方式的控制装置200中,定时信号和附加信息被单独地发送给传感器接口装置500。这样,例如能够构成为,将定时信号用作传感器接口装置500的触发信号,将附加信息输入到传感器接口装置500的输入端口。
[0060]
另外,与第一实施方式的控制装置100或控制系统10同样,能够对普通的传感器接口装置500的传感器值附加同步性高的附加信息,并能够实施时刻同步。
[0061]
在上述第一实施方式中,串行信号输出部150具有以下结构,将从定时信号生成部130接收到的定时信号、从附加信息生成部140接收到的附加信息转换为串行信息,并发送给传感器接口装置500,但不限于该结构。例如,也可以代替串行信号输出部150而使用不将定时信号和附加信息转换为串行信号而例如作为并行信号发送给传感器接口装置500的输出部。
[0062]
另外,在上述第一以及第二实施方式中,串行信号输出部150、定时信号输出部160以及附加信息输出部170与控制装置100或200成为了一体,但是不限于此。例如,也可以是这些输出部成为与控制装置100不同的另外单元,经由通信线路与控制装置100或200连接而构成。另外,构成也可以为,在控制装置100或200内执行处理直到编码为止,并通过另外单元执行数字信号输出。
[0063]
另外,在上述第一以及第二实施方式的控制系统10以及20中,控制装置100或200与附加信息解码装置700分开,但不限于此。例如,也可以这些装置成为一体,在相同装置内实现这些装置的功能。即,控制装置100或200更可以具备实现与附加信息解码装置700相同的功能的附加信息解码部180。
[0064]
另外,在第一以及第二实施方式中,附加信息解码装置700可以实施以下功能,即将解码后的附加信息用于分析,并显示在未图示的显示部上,可以实施传输到控制装置100或数值控制装置或机器人控制器等其他装置中。
[0065]
以上,说明了本发明的第一以及第二实施方式,但是本发明不限于这些实施方式。另外,这些实施方式中所记载的效果不过列举了从本发明产生的最优选的效果,本发明的效果不限定于这些实施方式所记载的内容。
[0066]
通过软件来实现控制装置100或200的控制方法。通过软件实现时,构成该软件的程序被安装到计算机(控制装置100或200)中。另外,这些程序也可以在被记录在可移动媒体中并发布给用户,也可以经由网络被下载到用户的计算机中并进行发布。进一步,这些程序也可以不下载而作为经由了网络的web服务器提供给用户的计算机(控制装置100或200)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1