燃气扰流片式伺服控制系统及方法与流程
1.本发明涉及一种伺服控制系统,具体涉及一种燃气扰流片式伺服控制系统及方法, 属于飞行控制技术领域。
背景技术:
2.为保持飞行器按照预定轨迹稳定飞行,需要控制力进行姿态调节,空气舵是最常见 的姿态调节方式。但在特殊情况下,如低速飞行阶段或在大气层以外时,空气舵效率较 低,通常利用发动机的高温燃气产生置偏力进行姿态调节,该类装置又称为推力矢量控 制机构,其中扰流片是典型的推力矢量控制方式之一。
3.扰流片布置在发动机喷口处(扰流片共有三片,周向间隔120
°
均匀布置),传统 的扰流片控制与舵机直接连接,扰流片偏转角度与舵机偏转角度相同,发动机尾焰上的 高温直接通过扰流片传递到舵机上,致使舵机工作温度远超设计值,长时间工作时舵机 内部结构件容易产生变形乃至卡死,影响控制效果。此外,传统舵机控制器多使用dsp 处理器或是arm单片机,在进行多个通道的舵机控制时,不同通道之间存在延时,这对 于采用高温燃气进行矢量控制的飞行器而言是不利的。
技术实现要素:
4.针对上述不足,本发明提出一种燃气扰流片式伺服控制系统,扰流片通过支撑杆与 舵机连接,使舵机远离高温热源,达到长时间进行扰流片控制的目的;此外利用fpga并 行处理的优势,实现舵控算法,完成对多个通道的舵机的并行控制,降低控制延时,提 高控制精度。
5.为实现上述目的,本发明所采取的技术方案是:
6.一种燃气扰流片式伺服控制系统,包括三片布置在发动机喷口处的扰流片,其特征 在于,包括:
7.控制扰流片的舵机,包括伺服电机和角度传感器,所述伺服电机的输出端连接有减 速器,所述减速器的输出端设有摆臂,所述角度传感器与减速器连接,所述摆臂与扰流 片之间通过支撑杆连接;
8.驱动舵机的伺服控制器,包括电源转换模块、处理器、驱动模块、ad采集模块和通 讯接口,其中
9.所述电源转换模块与输入电源连接,并向处理器、驱动模块、ad采集模块、通讯接 口、开关量检测模块和角度传感器供电;
10.所述通讯接口与处理器连接,用于处理器接收舵机的控制指令或发送伺服控制器的 工作状态信息;
11.所述ad采集模块连接处理器和三路角度传感器,用于采集角度传感器反馈信号,将 结果输出给处理器;
12.所述驱动模块连接处理器b和三路伺服电机,用于接收处理器的pwm控制信号,转
撑杆5长度方向布置,销轴插在条形孔内;或者,摆臂4上端设置球头,支撑杆5的端头 设有凹槽,球头插在凹槽内。
46.伺服控制器
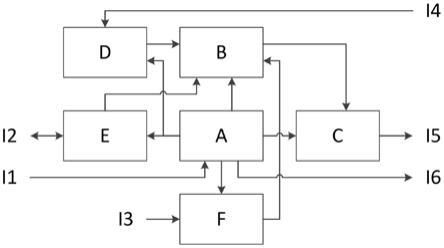
47.驱动舵机的伺服控制器,如图2所示,包括电源转换模块a、处理器b、驱动模块c、 ad采集模块d、通讯接口e和开关量检测模块f,以及外部接口的输入电源i1、控制指令 i2、起控信号i3、角度传感器反馈信号i4、舵机驱动输出i5、传感器供电i6。
48.如图3所示,所述电源转换模块a与输入电源i1连接,并向处理器b、驱动模块c、ad 采集模块d、通讯接口e、开关量检测模块f和角度传感器3供电。
49.所述电源转换模块a包括dcdc芯片a1、第一ldo芯片a2、第二ldo芯片a3、第三ldo芯 片a4,所述dcdc芯片a1将输入电源i1转换为6v后提供给第一ldo芯片a2、第二ldo芯片a3 和第三ldo芯片a4供电;第一ldo芯片a2将6v转换为3.3v和1.2v给处理器b供电;第二ldo 芯片a3将6v转换为3.3v给其他数字芯片供电,包括ad采集模块d、通讯接口e和开关量检 测模块f;第三ldo芯片a4将6v转换为5v给ad采集模块d以及角度传感器3供电;同时输入 电源i1给驱动模块c的驱动部分供电。
50.如图4所示,处理器b主要包括fpga芯片b1、晶振b2、flash芯片b3和sdram芯片b4, 由第一ldo芯片a2产生的3.3v电源给fpga芯片b1、晶振b2、flash芯片b3和sdram芯片b4 供电,此外第一ldo芯片a2还为fpga芯片b1提供1.2v的内核电源和复位信号。
51.fpga芯片b1通过ad采集模块d获取角度传感器反馈信号i4,结合通讯接口e接收的控 制指令i2,或调用内部预设舵机控制指令,进行舵控算法运算,解算出舵机的控制量, 输出pwm控制信号给驱动模块c。fpga芯片b1是整个伺服控制器的核心器件,选用xilinx 公司的xc6slx16系列的fpga芯片,对三路舵机进行并行运算控制,降低响应延时,提高 动态性能。
52.晶振b2给fpga芯片b1提供40mhz的时钟信号,所述flash芯片b3用于存储伺服控制程 序的配置程序和软核代码,fpga芯片b1在上电后从flash芯片b3加载程序代码,所述 sdram芯片b4用于存储控制运算过程的临时数据。
53.如图5所示,驱动模块c连接处理器b和三路伺服电机1,用于接收处理器b的pwm控制 信号,转换为驱动电源,并控制伺服电机1。
54.所述驱动模块c包括驱动芯片l6205pd,fpga芯片b1对驱动芯片l6205pd输出有效使 能信号motor_en后,输出24khz的pwm控制信号,调节pwm控制信号的占空比,就能调节 输出给舵机的电压和方向。
55.如图6所示,ad采集模块d连接处理器b和三路角度传感器3,用于采集角度传感器反 馈信号i4,将结果输出给处理器b。
56.所述ad采集模块d包含滤波电路和ad转换芯片两部分,角度传感器反馈信号i4经过 滤波后,通过一个电压跟随器连接到ad转换芯片的输入端,fpga芯片b1通过spi接口读 取角度传感器反馈信号i4。
57.如图7所示,通讯接口e与处理器b连接,用于处理器b接收舵机的控制指令或发送伺 服控制器的工作状态信息。
58.所述通讯接口e包括rs422接口芯片,通过rs422接口芯片将flash芯片b3的cmos电平 信号转换为满足rs422电平的通讯信号。
59.如图8所示,开关量检测模块f连接处理器b,用于接收起控信号i3,并发送给处理 器b;当处理器b检测到起控信号i3后,再根据接收到的控制指令对舵机进行控制。
60.fpga芯片b1上电配置完成后,开始检测起控信号i3,起控信号无效时,signal信号 的正负端连通,光耦输入端形成工作通路,输出端产生光电流,将输出信号拉至低电平, fpga芯片b1会忽视控制指令i2中的舵控指令;只有当起控信号有效时,起控信号有效时, signal信号的正负端断开,光耦输入端不发光,输出端无管电流产生,输出信号被上拉 为高电平,fpga芯片b1才会开始执行控制指令i2中的舵控指令。
61.燃气扰流片式伺服控制系统的控制方法:
62.伺服控制器的工作模式为,伺服控制器上电后不立刻开始舵机控制,当检测到起控 信号后才根据接收到的控制指令对舵机进行控制。fpga芯片b1上电配置完成后,开始检 测起控信号i3,起控信号i3无效时,fpga芯片b1会忽视控制指令i2中的舵控指令,只有 当起控信号i3有效时,fpga芯片b1才会开始执行控制指令i2中的舵控指令。
63.fpga芯片b1上电配置完成后,开始按照5khz的采样频率获取三个舵机的角度传感器 反馈信号i4,结合控制频率进行均值滤波处理,并转换成角度反馈值和角速度反馈值进 行存储。设第n次采样的值为i(n),则角度反馈值θ(n)和角速度反馈值ω(n)的计算式如下 所示,其中t
ω
为速度环控制周期:
[0064][0065][0066]
如图9所示,伺服控制器对舵机的控制采用位置环和速度环的双闭环控制策略,外 环位置环的控制周期要求小于等于控制指令的发送周期,否则导致较大控制延时,将位 置环的控制周期与指令发送周期设为一致,均为5ms,而内环速度环的控制周期为外环 位置环的控制周期的1/5~1/10,此处设计为1ms;在外环位置环控制中,伺服控制器按 照5ms的内环速度环的控制周期更新舵机的角度反馈值,结合控制指令中的舵机角度目 标值,进行角度的控制计算,其计算结果作为内环速度环的速度目标值;在内环速度环 控制中,伺服控制器按照1ms的内环速度环的控制周期获取舵机的角速度反馈值,结合 外环位置环的输出进行角速度的控制计算,其结果转换为控制舵机的pwm控制信号。
[0067]
fpga芯片生成的幅值为3.3v的pwm控制信号,pwm控制信号经过驱动模块c转化为24v 的电机驱动控制信号,驱动舵机转动,实现角度和力矩的输出。
[0068]
如图10所示,所述支撑杆5为“v”字形,夹角为转动支点c,夹角角度为α;支撑 杆5的一端与摆臂4活动连接,连接点为b,另一端与扰流片6相互垂直固定连接。舵 机转动时支撑杆5也会转动,扰流片6沿支撑杆5支点c摆动,改变扰流片6投射到飞 行器尾喷口的面积,从而改变推力。由于支撑杆5的存在,舵机转动的角度与扰流片6 偏转的角度不一致,则扰流片6水平方向的摆动角度δ与舵机的转动角度θ的换算关系为:
[0069][0070]
其中,如图10所示,a点为舵机转轴,ab边为舵机的摆臂l,bcd构成支撑杆5,角度 为α,cd边与扰流片6垂直,a点与c点直接的距离固定为s,β为∠bca。
[0071]
根据实际的零件尺寸和机构布局,得到在选定工作范围内扰流片角度和舵机角度关 系曲线如图11所示,为近似的线性关系。
[0072]
本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并非用于限定本 发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等, 均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1