一种工业废气检测小车的制作方法
[0001]
本实用新型涉及废气检测领域,尤其是涉及一种工业废气检测小车。
背景技术:
[0002]
在工业生产及大型工厂中,经常容易产生如挥发性有机物等容易带来危险和污染的工业废气。工厂平时生产过程中,需要对废气进行实时监测,以防止对大气造成污染或产生一些安全隐患。常见的工业废气包括:二氧化碳、二硫化碳、硫化氢、氟化物、烟尘以及工业性粉尘等。
[0003]
然而目前,大多数废气监测装置都是大型、固定的设备,容易出现监测的盲点;许多工业废气也对人体有不同程度的损害。这些传统的废气监测设施难以远程操控,对于空间狭窄,地理位置复杂的空间难以监测。
技术实现要素:
[0004]
本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种工业废气检测小车。
[0005]
本实用新型的目的可以通过以下技术方案来实现:
[0006]
一种工业废气检测小车,包括支架和安装于支架的摄像头、气体传感器、驱动电机、控制器、无线通信模块、蜂鸣器、轮体和测距传感器组,所述摄像头、气体传感器、驱动电机、无线通信模块、蜂鸣器和测距传感器组均连接控制器,所述驱动电机连接轮体。
[0007]
所述的支架包括第一板体和第二板体,所述第二板体置于第一板体下方并通过支柱与第一板体连接,所述第二板体连接轮体,所述摄像头、气体传感器和蜂鸣器固定于第一板体,所述无线通信模块、控制器和驱动电机置于第一板体和第二板体之间,所述测距传感器组安装于第二板体的周面。
[0008]
所述的测距传感器组包括红外线传感器和超声波传感器。
[0009]
所述的红外线传感器和超声波传感器各有两个,所述红外线传感器和超声波传感器间隔排布。
[0010]
所述的气体传感器包括pid-a1气体传感器和ld07粉尘激光传感器。
[0011]
所述的无线通信模块为zigbee无线通信模块。
[0012]
所述的zigbee无线通信模块包括cc2530芯片。
[0013]
该工业废气检测小车还包括温湿度传感器,所述温湿度传感器固定于第一板体且与控制器连接。
[0014]
所述的控制器为单片机。
[0015]
所述的摄像头通过摄像头支承体固定于第一板体的上方。
[0016]
与现有技术相比,本实用新型具有以下优点:
[0017]
(1)采用摄像头和无线通信模块,通过测距单元和控制器实现自动路径规划和避障,结合气体传感器可以实施远程监控环境信息,蜂鸣器可报警,防止在恶劣环境中人工监
测的危险性。
[0018]
(2)替代大型废气检测设备,远程操控等功能大大提高了工业废气监测的灵活性、精度以及效率。
附图说明
[0019]
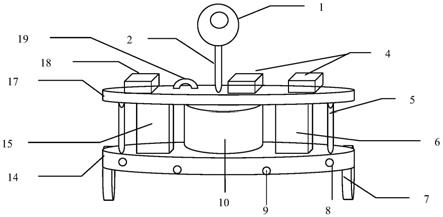
图1为本实用新型的结构示意图;
[0020]
图2为本实用新型的系统原理框图;
[0021]
图3为本实用新型小车的使用方法图;
[0022]
附图标记:
[0023]
1为摄像头;2为摄像头支承体;4为气体传感器;5为支柱;6为驱动电机;7为轮体;8为红外线传感器;9为超声波传感器;10为控制器;14为第二板体;15为无线通信模块;17为第一板体;18为温湿度传感器;19为蜂鸣器。
具体实施方式
[0024]
下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
[0025]
实施例
[0026]
本实施例提供一种工业废气检测小车,如图1所示,包括支架和安装于支架的摄像头1、温湿度传感器18、气体传感器4、驱动电机6、控制器10、无线通信模块15、蜂鸣器19、轮体7和测距传感器组,摄像头1、温湿度传感器18、气体传感器4、驱动电机6、无线通信模块15、蜂鸣器19和测距传感器组均连接控制器10,驱动电机6连接轮体7,本实施例轮体7为万向轮,驱动电机6带动万向轮行进,控制器10为单片机,电池单元为需电设备供电。
[0027]
具体而言:
[0028]
支架包括第一板体17和第二板体14,第二板体14置于第一板体17下方并通过支柱5连接,第二板体14连接轮体7,摄像头1、温湿度传感器18、气体传感器4和蜂鸣器19固定于第一板体17,无线通信模块15、控制器10和驱动电机6置于第一板体17和第二板体14之间,测距传感器组安装于第二板体14的周面。
[0029]
测距传感器组包括红外线传感器8和超声波传感器9,红外线传感器8和超声波传感器9各有两个,红外线传感器8和超声波传感器9均匀交替排布,用于检测各个方向的障碍。
[0030]
气体传感器4包括pid-a1气体传感器和ld07粉尘激光传感器:
[0031]
用于检测vocs气体的pid-a1气体传感器(光电离子探测器)可以测量100ppb-6000ppm量程范围的voc气体和一些有毒气体。在-40℃到55℃、相对湿度0-95%的环境范围内都可以工作。工作电压3-3.6v,功耗110mw。在气体自由扩散情况下响应时间小于3秒。适合化工、石油等工业领域的应用。
[0032]
ld07粉尘激光传感器是一款基于激光散射原理的数字式通用颗粒物浓度传感器,可检测空气中不同粒径的悬浮颗粒物(包括pm2.5)的浓度。该传感器以激光二极管为光源,照射在空气中的悬浮颗粒物上产生散射,同时利用光电探测器收集散射光。收集到的散射
光由于光电效应而产生电流信号,经电路放大及处理后,即可得到颗粒物的浓度值,再通过控制器10基于米氏(mie)理论的算法换算成质量浓度(μg/m3),并以通用数字接口形式输出。
[0033]
路径规划通过蚁群算法实现,蚁群算法是一种著名的仿生算法,模拟自然界中常见的蚂蚁觅食场.在蚂蚁觅食寻路的过程中,会通过释放信息素来提醒同伴这条路径是否为优秀路径.在算法中,通过公式计算模拟蚂蚁通过道路时留下信息素的这一行为,并利用信息素的浓度和启发式系数的值来计算蚂蚁的转移概率,指导蚂蚁对路径进行选择.同时算法模拟自然界中信息素的挥发与更新,将信息素浓度控制在一定的范围之内,并保留较优路径在后续迭代中的备选优势.经过一定次数的迭代之后,算法最终能够得出全局的优秀路径。
[0034]
无线通信模块15为zigbee无线通信模块:
[0035]
该模块是基于uart接口的全双工无线传输模块,可以工作在2.4-3.45ghz公用频段,该模块采用的是ti的cc2530芯片,符合标准的ieee802.15.4协议,该模块可以直接与控制器10的串口连接,实现无线数据传输,使用简单。zigbee的技术特点是:近距离、低复杂度、自组织、低功耗、低数据速率。zigbee的操作方法也十分简单,分为3个步骤:
①
设置波特率,本实施例采用的为9600;
②
设置信号,使分别用于接收的2个zigbee无线通信模块在同一信道才能实现数据的传输;
③
设置工作模式,分为点对点工作模式和广播模式,顾名思义,点对点就是一对一传输,广播模式就是一对多或者多对一传输。设置完这3步骤,该模块就能实现数据的双向同时收发。
[0036]
使用方法:
[0037]
首先由事先编程好的蚁群算法规划小车行进路线,同时对所监测气体和粉尘浓度以及环境安全范围内的温湿度进行设定。直流电动机驱动小车按照规划路线行进,同时通过红外线传感器8和超声波传感器9进行自动避障,以保证路线行进的安全和稳定。摄像头1实时采集视频数据,气体传感器4采集被监测的粉尘浓度,并通过无线通信模块15传回。当气体和粉尘浓度、温湿度不在所设定的安全值内时,控制器10控制蜂鸣器19报警,并传回上位机。
[0038]
与现有技术相比,本实施例的工业废气检测小车解决了现有的工业废气监测装置不够灵活的问题,可以进入地形空间更为复杂、人员难以进入勘测的环境下进行废气监测,防止在恶劣环境中人工监测的危险性,可以实现远程收集现场视频和环境资料数据,从而可以节省人力,提高工作效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1