一种车间监控小车的制作方法
[0001]
本实用新型涉及车间监控领域,尤其是涉及一种车间监控小车。
背景技术:
[0002]
在工厂作业车间中,保证人员和设备安全一直是一项非常重要的内容。尤其是在下班后、节假日,车间呈现无人的状态,许多安全隐患无法被觉察,这将会给工厂安全造成严重威胁。工厂火灾具有突发性,短时间能够造成巨大损失,因此一旦有火警发生就必须以极快的速度采取扑救措施。现有技术的摄像头监控或人员进行巡视往往存在诸多监控死角,以至于不能及时应对化药品泄漏造成大面积的浓烟、火灾或粉尘浓度过高造成工厂爆炸。
技术实现要素:
[0003]
本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种车间监控小车。
[0004]
本实用新型的目的可以通过以下技术方案来实现:
[0005]
一种车间监控小车,包括支架和安装于支架的摄像头、主控制器、从控制器、超声波传感器、电机、轮组、红外传感器和粉尘传感器,所述电机与轮组连接,所述从控制器连接超声波传感器、电机、红外传感器和粉尘传感器,所述主控制器连接摄像头和从控制器,所述主控制器设有无线传输模块,电池单元连接主控制器和从控制器。
[0006]
所述的支架包括从上到下依次排布的第一板体、第二板体和第三板体,所述第一板体、第二板体和第三板体之间通过支柱连接,所述摄像头安装于第一板体上方,所述主控制器、从控制器、红外传感器和粉尘传感器安装于第二板体,所述超声波传感器、电机和轮组安装于第三板体。
[0007]
所述摄像头连接舵机云台,所述舵机云台连接从控制器,所述舵机云台安装于第一板体。
[0008]
所述的主控制器为树莓派。
[0009]
所述的从控制器为stm32单片机,stm32单片机设有温度传感单元。
[0010]
所述的红外传感器为rpr220红外传感器。
[0011]
所述的超声波传感器为hc-sr04超声波传感器。
[0012]
所述的粉尘传感器为pd4ns粉尘传感器。
[0013]
所述的电机连接l293d电机控制板。
[0014]
所述的无线传输模块为wifi模块。
[0015]
与现有技术相比,本实用新型具有以下优点:
[0016]
(1)小车设有主控制器和从控制器,主控制器收集摄像头拍摄的图像,可检测到火灾图像,且因主控制器仅负责图像处理,可搭载训练好的cnn网络以实现准确状况判断;从控制器收集粉尘传感器等信息,进一步对现场情况进行判断;红外线传感器和超声波传感
器实现循迹避障,配合小车本身的轻便性和机动性,能够对车间的盲区进行巡逻,并且能够替代人工对出现的灾情进行识别、判断和报警。
[0017]
(2)主控制器为树莓派,可使整个小车体积小、成本低,树莓派与上位机可以实现无线连接,将摄像头捕捉到的火灾图像和主控制器独立开来,在设备布置上更为便利。
[0018]
(3)支架包括从上到下依次排布的第一板体、第二板体和第三板体,分层结构有利于器件排布。
[0019]
(4)采用主从控制器结合,辅以stm32单片机对小车各传感器模块的信息进行分析处理,并驱动小车的行驶,减少树莓派的运算量,提升图像识别速率。
附图说明
[0020]
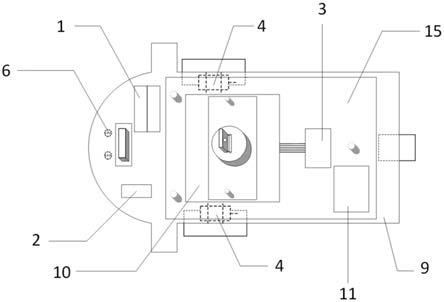
图1为本实用新型的俯视图;
[0021]
图2为本实用新型的主视图;
[0022]
附图标记:
[0023]
1为电池单元;2为电机控制板;3为从控制器;4为电机;6为红外线传感器;7为舵机云台;8为摄像头;9为第三板体;10为主控制器;11为粉尘传感器;12为超声波传感器;13为万向轮;14为定滑轮;15为第二板体。
具体实施方式
[0024]
下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
[0025]
实施例
[0026]
本实施例提供一种车间监控小车,包括支架和安装于支架的摄像头8、主控制器10、从控制器3、超声波传感器12、电机4、轮组、红外传感器6和粉尘传感器11,电机4与轮组连接,从控制器3连接超声波传感器12、电机4、红外传感器6和粉尘传感器11,主控制器10连接摄像头8和从控制器3,主控制器10设有无线传输模块,电池单元1连接主控制器10和从控制器3,摄像头8连接舵机云台7,舵机云台7连接从控制器3,舵机云台7安装于支架。
[0027]
具体而言:
[0028]
支架包括从上到下依次排布的第一板体、第二板体15和第三板体9,第一板体、第二板体15和第三板体9之间通过支柱连接,摄像头8安装于第一板体上方,主控制器10、从控制器3、红外传感器6和粉尘传感器11安装于第二板体15,超声波传感器12、电机4和轮组安装于第三板体9。
[0029]
主控制器10为树莓派,从控制器3为stm32单片机,stm32单片机设有温度传感单元。
[0030]
摄像头8摄取工厂车间内连续的图像,传送至树莓派,树莓派将拍摄的图像进行预处理,输入已训练好的卷积神经网络模型,识别出发生火灾情形时的图像(火光和烟雾),最终传送至服务器平台(上位机)进行报警及后续处理。搭配从控制器stm32单片机,红外传感器6对小车进行黑色轨道循迹,超声波传感器12避障,电池单元1包括12v干电池和lm7805稳压模块,lm7805稳压模块将12v干电池直流电压降压输出成5v为主控制器10和从控制器3供
电;轮组包括两个万向轮13和一个定滑轮14,两个万向轮13连接电机4。
[0031]
stm32单片机和树莓派利用串口进行通信。树莓派内部需配置计算机视觉库opencv、深度学习库tensorflow以及python开发环境,tensorflow中搭建训练好的cnn模型。树莓派使用linux衍生操作系统raspbian,具有多线程及多进程的高级管理功能,为提升图像处理速度,辅以stm32单片机分开同时处理传感器信息,提升运行效率。
[0032]
电机控制板2为l293d电机控制板,驱动左右两个万向轮13的电机4正反转,控制小车进行前后左右行驶,l293d电机控制板内部结构为双h桥路。红外传感器6为rpr220红外传感器,共有四个引脚,用黑色胶体将它的发射装置和接收装置封装在一块,根据光的反射强弱进行循迹。超声波传感器12使用hc-sr04超声波传感器。粉尘传感器11使用pd4ns粉尘传感器,主要特点有pwm方式输出,结构紧凑,单电源供电,价格低,利用光学原理,能够探测1微米以上的粉尘粒子。
[0033]
支柱为金属支柱,金属支柱通过螺栓与第一板体、第二板体15和第三板体9连接。
[0034]
无线传输模块为wifi模块,主控制器10能够利用wifi模块,有选择性地上传成功识别出来的火灾情形图像,定期传输当前粉尘浓度、车间温度信息,提供给服务器平台进行报警、预防处理。
[0035]
从控制器3具体采用stm32f101c8型号单片机,32位cpu。片上集成32-512kb的flash存储器,6-64kb的sram存储器。3个12位的us级的a/d转换器(16通道)。片上集成一个温度传感单元,包含112个快速i/o端口,4个16位定时器,2通道12位d/a转换器。主控制器树莓派选择3代b+,树莓派相比与普通电脑作为图像识别的载体,具有体积小巧,功能齐全,便于安装的特点。
[0036]
摄像头8采用树莓派摄像头,和树莓派开发板匹配,更好配置,在终端只需输入几条命令便可成功激活树莓派摄像头。树莓派摄像头的像素也与普通摄像头一样有多种可以选择。
[0037]
使用方法:
[0038]
打开电源开关,lm7805稳压模块输出5v电压给树莓派、stm32单片机供电,把小车放在预先敷设好的轨道线正中央,摄像头依靠舵机带动对周围环境进行全方位采集图像,传输给树莓派。事先利用火灾烟雾数据集训练出合适的cnn神经网络模型,将树莓派接收到的图像,在opencv库中进行预处理,之后将图片数据读入到tensorflow库中,对是否为火灾图像(火光、烟雾)进行识别判断。树莓派通过自带的wifi模块,如若识别到灾情,将其上传给服务器平台。同时,对单片机i/o口进行定义,使得各功能传感器信息都通过stm32单片机i/o口传输,先送至单片机,再通过串口传送至树莓派,最后上传给服务器平台进行处理,减少树莓派运算量。小车电机调速使用pwm脉宽调节,通过编程调节占空比改变电机转速,可以调整小车向前行驶的速度,并采用两轮驱动,车尾利用定滑轮作支撑。
[0039]
本实施例的车间监控小车具有以下优点:
[0040]
小车设有主控制器和从控制器,主控制器收集摄像头拍摄的图像,可检测到火灾图像,且因主控制器仅负责图像处理,可搭载训练好的cnn网络以实现准确状况判断;从控制器收集粉尘传感器等信息,进一步对现场情况进行判断;红外传感器和超声波传感器实现循迹避障,配合小车本身的轻便性和机动性,能够对车间的盲区进行巡逻,并且能够替代人工对出现的灾情进行识别、判断和报警。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1