信号干扰抑制方法及设备与流程
本发明一般涉及一种使用检测到的信号控制设备的方法,涉及一种设备,例如机器人割草机,以及包括这种设备的系统。
背景技术:
1、各种设备,特别是自动割草机,使用设备从外部信号源接收的信号来操作。该设备可以包括干扰信号的干扰源,从而改变接收到的信号。这可能会降低设备的信号相关操作的质量。
2、众所周知,机器人割草机,也称为自走式割草机。这些机器人割草机配有可充电电池。草坪的区域可以用边界线定义。机器人割草机可以使用通过边界线传输的信号来确定其位置,例如,在该区域内导航和停留。当电池中的剩余电量低于一定水平时,机器人割草机被配置为返回充电站为电池充电。将机器人割草机返回到充电站有不同的可能性。一种可能的方法是,机器人割草机在接到返回充电站的命令后,继续移动,直到在附近检测到边界线,然后沿着边界线到达沿边界线某处提供的充电站。返回充电站时的另一种选择是使用引导线,机器人割草机跟随引导线返回充电站。
3、该设备的干扰源,例如,包括电动机和机器人割草机的刀片的切割设备,干扰来自信号源的信号。例如,电动机产生电磁噪声和/或刀片的旋转可能会影响由设备接收的来自信号源的信号的失真。
4、wo 2020/148138 a1描述了使用数字信号处理器来提供对应于多个记录的传输信号突发的平均值的输出以处理噪声条件。该解决方案需要相当复杂的处理硬件,该处理硬件在噪声信号中找到信号突发并对突发进行平均。此外,平均需要在相对较长的时间跨度上记录信号,这导致了较长的响应时间。此外,噪声贡献可能保留在平均信号中。
5、us 2018/0199506 a1提出在导线传感器检测到磁场时降低割草机切割刀片电机的电压,并在磁场检测完成后重新启动切割刀片电机。这能够避免由切割刀片电机产生的干扰,但是以降低切割效率为代价。
6、cn 103941600 b描述了一种自动工作系统,包括检测周围空间中的噪声信号并相应地产生检测信号的噪声检测设备,以及与噪声检测设备电连接并接收检测信号的控制设备,并根据检测信号滤除环境信号,以衰减处理后的信号中与噪声信号对应的部分。此类解决方案通常需要复杂的硬件设置。
技术实现思路
1、本发明的一个目的是提供一种改进的信号干扰抑制。
2、根据本发明的一个方面,该目的通过一种用于控制设备的方法来实现,该设备包括至少两个传感器和干扰源,该干扰源能够干扰由所述至少两个传感器检测到的信号。该方法包括通过至少两个传感器检测在不同时间点t1-t3的信号,所述信号包括来自外部信号源的突发信号,将指示检测到的信号的数据存储在存储器中,根据比较存储在存储器中的三个不同时间点t1-t3的信号的指示性数据确定信号值d1-d3,以彼此之间相互区分。例如,将信号值d1-d3分为低信号值、中间信号值和高信号值,通过所述至少两个传感器中的至少一个传感器检测到的当前信号值中减去中间信号值,以获得至少一个经处理的信号值,并且基于处理后的信号值来控制设备的操作,例如,导航所述设备。这些步骤可以迭代地重复,例如,采样传感器对每个时间离散的样本的读数进行采样。
3、正是基于这样的想法,即通过使用存储的参考信号值作为基线来为设备,特别是机器人割草机提供改进的信号干扰抑制,所述基准信号值与其他两个所存储的值相比没有极值,使得用作基准的参考信号数值可能不包含突发信号。这允许以非常短的响应时间有效地抑制噪声信号干扰。此外,不需要中断用于信号检测的设备的操作。可以使用所述至少两个传感器中的第一传感器来确定所述低信号值、所述中间信号值和所述高信号值中的至少一个,并且可以使用所述至少两个传感器中的第二传感器来确定在所述低信号值、所述中间信号值以及所述高信号值的另一个。
4、根据一个实施例,干扰源包括可绕旋转轴线旋转的可旋转部件。可选地,该方法还包括确定可旋转部件的旋转速度。可旋转部件可以是由至少两个传感器检测到的信号的周期性噪声源。周期性噪声可能会干扰突发信号。通过确定旋转速度,可以改进对三个不同时间点的选择。
5、根据一个实施例,可旋转部件是刀片和/或包括电机的干扰源,特别是电动机。例如,电机被配置为旋转刀片。该设备可以是机器人割草机。电机和/或刀片可能是噪声源。通过应用本文所述的方法,可以使用产生相对较强噪声但从检测到的信号中减去噪声分量的电机和/或刀片。这允许在选择用于制造设备的部件时有更广泛的选择,从而减少了制造工作量和成本。
6、根据一个实施例,该方法还包括确定第一时间偏移和第二时间偏移。可选地,第二时间偏移小于第一时间偏移。这允许简单地确定不同的时间点。
7、干扰源可以被设计为产生周期性的电磁信号,特别是作为不希望的副作用。周期信号可能会干扰脉冲信号。这里描述的方法和设备允许减去这种干扰。
8、所述至少两个传感器包括第一传感器和第二传感器。根据一个实施例,第一时间偏移可以是可旋转部件围绕旋转轴线旋转一圈、两圈或多圈的时间,和/或第二个时间偏移是将可旋转组件的一部分从最接近第一个传感器旋转到最接近第二个传感器的时间。这允许特别有效地选择用于噪声减法的参考信号。例如,第一时间偏移t1可以等于电机(例如切割电机)和/或盘(例如切割盘)旋转一圈的时间。第二时间偏移量t2可以等于旋转一圈的一部分的时间,例如,取决于切割盘上刀片的数量和/或电机中的极数。例如,对于三刀片切割盘,第二时间偏移量t2可以等于第一时间偏移除以三,t1/3。
9、根据一个实施例,三个不同的时间点t1-t3包括:第一个时间点t1,例如,在当前时间t之前偏移t1,t1=t-t1,第二个时间点t2,例如,在当前时间t之前偏移t2,t2=t-t2,和/或,第三个时间点t3,例如,在当前时间t之前偏移第一时间偏移t1和第二时间偏移t2,t3=t-(t1+t2)。例如,刀片在从第一传感器朝向第二传感器的方向上旋转。或者,它以相反的方向旋转。
10、根据一个实施例,比较信号值d1-d3包括:在第一时间点t1确定的第一信号值d1、在第二时间点t2确定的第二信号值d2和在第三时间点t3确定的第三信号值d3。这允许进一步改进噪声减法。
11、可选地,使用第一传感器确定第一信号值d1,使用第二传感器确定第二信号值d2,和/或,使用第二传感器确定第三信号值d3。
12、根据一个实施例,信号值d1-d3是在各个时间点t1-t3处的对应信号的信号强度。
13、根据一个实施例,提供了一种设备。该设备包括至少两个传感器和干扰源,该干扰源干扰由至少两个传感器检测到的信号。该设备配置为通过至少两个传感器检测不同时间点t1-t3的信号,该信号包括来自信号源的突发信号,将指示检测到的信号的数据存储在存储器中,根据比较存储在存储器中的三个不同时间点t1-t3的信号的指示性数据确定信号值d1-d3,以相互区分。例如,将信号值d1-d3分为低信号值、中间信号值和高信号值,通过所述至少两个传感器中的至少一个传感器检测到的当前信号值中减去中间信号值,以获得至少一个经过处理的信号值,并且基于处理后的信号值来控制设备的操作。
14、关于该设备的优点,请参考上面对控制该设备的方法的描述。
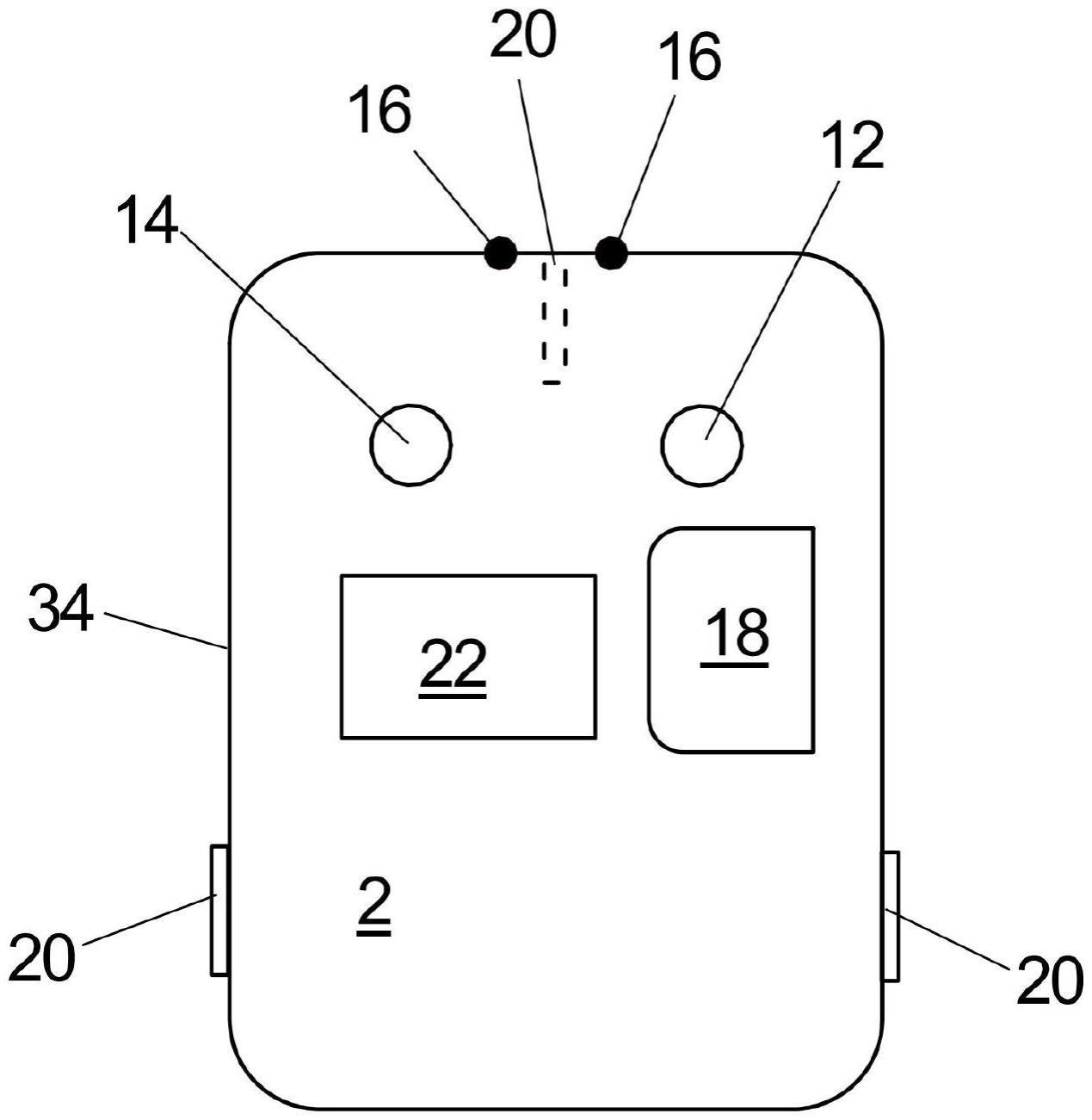
15、根据一个实施例,所述至少两个传感器包括第一传感器和第二传感器。可选地,第一传感器和第二传感器中的一个或每一个用于感测磁场。
16、根据一个实施例,所述设备包括主体,并且所述第一传感器和所述第二传感器布置在主体处并相对于彼此移位。通过这种布置,干扰源在特定时间点对第一传感器和第二传感器检测到的信号的干扰可以是不同的。
17、根据一个实施例,干扰源包括可绕旋转轴线旋转的可旋转部件。可选地,第一传感器和第二传感器被布置为使得旋转轴线以及第一传感器和第二传感器限定以旋转轴线为圆心的四分之一圆或小于四分之一的圆。更一般地,第一传感器和第二传感器可以一起描述相对于旋转轴线的角度α。第二时间偏移除以第一时间偏移的比值t2/t1可以等于该角度α与一个完整圆的比值,α/360°。这允许特别有效地滤除噪声中常规噪声的部分。
18、例如,干扰源包括电机和可通过电机旋转的刀片。
19、可选地,所述刀片包括磁性材料。使用上述方法,可以容易地过滤掉由这种磁性刀片感应的信号部分。由于所使用的合金和/或由于制造条件,刀片可能是磁性的,避免刀片具有磁性可能会明显增加制造复杂性并限制材料的选择。因此,通过软件过滤掉干扰,可以简化制造,并允许在刀片的材料方面有更广泛的选择。
20、根据一个实施例,该设备是机器人割草机。
21、可选地,本文所述的任何实施例的设备适于执行本文所述任何实施例中的方法。反过来,本文描述的任何实施例的方法可以使用本文描述的任意实施例的设备。
22、根据一个目的,提供了一种系统,该系统包括根据本文所述的任何实施例的设备和作为信号源的导线。其中,导线可以是布置在由边界线或边界线限定的区域内的引导线。
23、该系统还可以包括适于通过信号源发送突发信号的信号发生器。
24、由此,提供了一种允许改进的信号干扰抑制的方法、设备和系统。
- 还没有人留言评论。精彩留言会获得点赞!