一种基于障碍检测的移动机器人自适应速度调节方法与流程
[0001]
本发明涉及机器人技术领域,尤其涉及一种基于障碍检测的移动机器人自适应速度调节方法。
背景技术:
[0002]
随着移动机器人越来越多的应用到各个场景,包括室内场景,如何在保证在无碰撞风险的情况下提升机器人的移动效率是移动机器人应用的难点问题。目前常用的方法为,当机器人在一定范围内没有感知到障碍物时,则提升机器人的行驶速度;当检测到机器人附件有障碍物时,则降低机器人的行使速度。该方法的弊端在于无差别对待感知到的机器人周围的障碍物,当机器人靠近墙体、建筑物等环境中固有非变动的障碍时,仍会降低行驶速度,使其移动效率受限,但如果降低感知范围进行提速时又难以保证其行驶时的无碰撞安全性。
技术实现要素:
[0003]
本发明的目的是克服上述现有技术的缺点,提供一种在保证机器人行驶安全性的前提下提高机器人行驶效率的基于障碍检测的移动机器人自适应速度调节方法。
[0004]
本发明是通过以下技术方案来实现的:一种基于障碍检测的移动机器人自适应速度调节方法,包括下列步骤:s1、机器人行走过程中遍历环境中障碍物上的障碍点,得到有效障碍点信息;环境中的障碍物以离散的障碍点来描述。
[0005]
s2、将有效障碍点映射到环境地图上,通过与环境地图上预设的障碍点匹配,将有效障碍点分为固有障碍点和非固有障碍点;环境地图上预设的障碍点为环境固有障碍物信息,环境固有障碍物以离散数据点来描述。
[0006]
s3、根据非固有障碍点的位置得到机器人的最大允许速度,机器人基于最大允许速度控制行走。
[0007]
进一步优化的技术方案是,s1步骤中机器人得到有效障碍点信息的方法为:s1-1、机器人遍历环境中障碍物上的所有障碍点,根据障碍点坐标计算障碍点到机器人中心的距离,记为 d1;s1-2、若d1小于机器人的感知设定距离a,则该障碍点为有效障碍点,将其加入到有效障碍物数据集中;s1-3、遍历有效障碍物数据集中的有效障碍点,如距离有效障碍点周围设定值b内没有其它有效障碍点,则将该有效障碍点为离群点,将其从有效障碍物数据集中剔除。
[0008]
进一步优化的技术方案是,所述移动机器人为室内移动机器人,s1-2中感知设定距离α=3.0m。
[0009]
进一步优化的技术方案是,s1-3中设定值b=0.3m。
[0010]
进一步优化的技术方案是,s2步骤中将有效障碍点分为固有障碍点和非固有障碍
点的方法为:s2-1、基于机器人的实时位姿,将有效障碍点映射到已构建的环境地图上;s2-2、遍历环境地图上的有效障碍点,计算各个有效障碍点为固有障碍的置信度p,若有效障碍点为固有障碍的置信度p大于设定值c,则认为该有效障碍点为环境中的固有障碍点,否则为非固有障碍点。
[0011]
进一步优化的技术方案是,s2-2步骤中某个有效障碍点为固有障碍的置信度p的计算方法为:计算该有效障碍点与环境地图上预设的各个障碍点之间的距离,选择其中的最小距离,记为d2;由以下公式得到该有效障碍点为固有障碍的置信度p:,其中σ为常数,表示标准差;0≤p≤1。
[0012]
进一步优化的技术方案是,所述σ=0.1。
[0013]
进一步优化的技术方案是,设定值c=0.6。
[0014]
进一步优化的技术方案是,所述环境地图上预设的各个障碍点为距离所述有效障碍点周围设定值h内的预设障碍点。设定值h可设定为1.0m。
[0015]
进一步优化的技术方案是,当距离所述有效障碍点周围设定值h(如1.0m)内没有预设障碍点,则该有效障碍点为固有障碍的置信度p=0。
[0016]
进一步优化的技术方案是,s3步骤中根据非固有障碍点的位置得到机器人的最大允许速度的方法为:s3-1、计算环境地图上所有非固有障碍点到机器人中心的距离,选取其中的最小距离,记为 d3;s3-2、计算机器人的最大允许速度v
max
,计算公式如下:,其中a为机器人的感知设定距离,单位为m;0≤d3≤a,单位为m;v
max
的单位为m/s。
[0017]
进一步优化的技术方案是,a=3.0m。
[0018]
本发明首先以机器人行驶过程的一定范围内的障碍点(障碍物由若干障碍点组成)建立有效障碍物数据集,并剔除离群点数据,保证有效障碍点的可靠性,提高机器人行驶的效率;再将有效障碍点映射到环境地图上,通过将有效障碍点信息与已构建的环境地图上的障碍点信息进行匹配,根据匹配度来区分障碍物是否为环境中的固有障碍物,从而将环境中的固有障碍物剔除出影响机器人行驶速度的有效障碍物数据集中,通过置信度公式判断有效障碍点是固有障碍点还是非固有障碍点,可适应不同的场景和不同的传感器设备,准确度更高;最后根据非固有障碍点与机器人之间的距离来决定机器人行驶的最大速度,使机器人可自适应调节速度,最大允许速度的计算方法可保证更高的平均速度,提高行驶效率的基础上保证了机器人行驶的安全性。
附图说明
[0019]
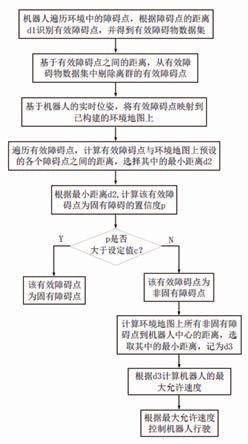
图1为本发明的流程框架图。
[0020]
图2为本发明中置信度函数曲线图。
具体实施方式
[0021]
一种基于障碍检测的移动机器人自适应速度调节方法,如图1,包括下列步骤:1、机器人遍历环境中障碍物上的障碍点,得到有效障碍点信息。
[0022]
环境中的障碍物以离散的障碍点来描述,有效的障碍点才能表示真实的障碍物,因而需要对有效障碍点进行认定和处理。有效障碍点的认定和划分可有不同的标准和方法,作为其中一种实施方式,具体方法如下:s1-1、机器人遍历环境中障碍物上的所有障碍点,根据障碍点坐标计算障碍点到机器人中心的距离,记为d1。
[0023]
机器人可通过激光雷达、双目视觉传感器等识别障碍点,若干个障碍点构成一个或多个障碍物,同时通过上述传感器计算测量各障碍点到机器人中心的距离。
[0024]
s1-2、若d1小于机器人的感知设定距离a,则该障碍点为有效障碍点,将其加入到有效障碍物数据集中。
[0025]
为简化计算以及提高数据的准确性,本发明在机器人行走时只考虑其实时位置周围一定范围内的障碍物,其它障碍物暂时不予考虑,机器人行走过程中,随着其坐标位置的移动,不断有新的障碍点进入有效障碍物数据集中,也不断有障碍点从有效障碍物数据集中移出。一个障碍物由若干个障碍点组成,若干个障碍物的数据点组成障碍物数据集。
[0026]
s1-3、过滤上述有效障碍物数据集中的离群点,具体方法为:遍历有效障碍物数据集中的有效障碍点,如距离有效障碍点设定值b内没有其它有效障碍点,表明该数据点为离群点,则将该有效障碍点从有效障碍物数据集中剔除。
[0027]
通常一个障碍物不会由一个数据点(即障碍点)组成,因此一个离群的数据点不会是障碍物数据点,为了降低数据噪声,故剔除离群的数据点。
[0028]
本发明的方法可适用于各种机器人的行走控制,包括室内机器人,如扫地机器人、消毒机器人、配送机器人等。当移动机器人为室内移动机器人时,s1-2中感知设定距离a可设定为3.0m,即障碍点到机器人中心的距离d1<3.0m时,则该障碍点认定为有效障碍点。同时,s1-3中距离有效障碍点设定值b可设定为0.3m,即当有效障碍点0.3m内没有其它有效障碍点时,则将该有效障碍点从有效障碍物数据集中剔除。当然,感知设定距离a、距离有效障碍点设定值b也可为其它数值,根据移动机器人具体的工作场景来灵活设定。
[0029]
2、将有效障碍点映射到环境地图上,通过与环境地图上预设的障碍点匹配,将有效障碍点分为固有障碍点和非固有障碍点,并由此区分障碍物为固有障碍物,还是非固有障碍物。
[0030]
固有障碍物一般为环境中固定设置固定不动的障碍物,如墙壁、固定设施等,而非固定障碍物一般为不固定的静止或移动的障碍物,其可变动性大,如被搬动至环境中的物品、静止或移动的其它机器人等。创建环境地图时,将墙壁、设备等区域标记为障碍区域。
[0031]
对于固有障碍物和非固有障碍物的认定和划分可参照现有的技术,如视觉传感技术,预先存储固有障碍物的图像信息,机器人行走中当障碍物图像信息与预先存储的固有
障碍物的图像信息相匹配,则该障碍物认定为固有障碍物。
[0032]
作为其中一种实施方式,上述固有障碍物和非固有障碍物的认定方法具体如下:s2-1、基于机器人的实时位姿,将有效障碍点映射到已构建的环境地图上。
[0033]
地图映射的方法可参考现有技术,障碍物以环境地图上离散的坐标点(对应障碍点)来描述。环境地图中预设的固有障碍物也以离散点来描述,对应本申请中的固有障碍点。
[0034]
s2-2、遍历环境地图上的有效障碍点,计算各个有效障碍点为固有障碍的置信度p,若有效障碍点为固有障碍的置信度p大于设定值c,则认为该有效障碍点为环境中固有障碍物上的点,否则为非固有障碍物上的点。有效障碍点为固有障碍的置信度p即有效障碍点为固有障碍物上点的概率,p越大,表示有效障碍点为固有障碍物上点的概率就越大。本实施例中,设定值c优选0.6。
[0035]
本实施例中,某个有效障碍点为固有障碍的置信度p的计算方法为:(1)计算该有效障碍点与环境地图上预设的各个障碍点(表示固有障碍物的点)之间的距离,选取其中的最小距离,记为d2。
[0036]
本发明基于二维平面地图,预先将环境地图分为未知区域、障碍区域和可行驶区域三个部分,墙壁、固定的设备设施等均为障碍区域,各个区域在地图上以离散的点来描述(可将每个离散点间距设置为0.05m)。当进行有效障碍点计算时,只考虑障碍区域上的点,计算映射到环境地图上的有效障碍点与环境地图上障碍点之间的距离(在地图二维平面上的距离),得到有效障碍点与环境地图上各障碍点之间的距离值,d2为其中最小的距离值。
[0037]
具体操作中,为简化计算,可仅计算有效数据点周围一定范围内(如1.0m)的环境地图上预设的各障碍点,取最小距离值,如有效障碍点周围一定范围内(如1.0m)没有预设的障碍点,则该有效障碍点为固有障碍点的几率很小,大概率为非固有障碍点,p值趋近于零,对应的是非固有障碍物。
[0038]
(2)由以下公式得到该有效障碍点为固有障碍的置信度p:其中σ为一常数,表示标准差,可根据传感器的精度来设置;0≤p≤1。当移动机器人为室内机器人时,所述σ可设定为0.1。d2的计算是基于映射的环境地图。置信度函数曲线如图2所示。
[0039]
上述方法通过计算障碍点为固有障碍物上点的概率来判断该点是否为固有障碍物上点,可根据不同场景、不同设备情况调整标准差来满足应用要求,而通常通过距离值的偏差范围来匹配的方法,需要根据不同场景、不同设备情况调节距离值,相比而言,本发明的方法更易量化,准确度更高。
[0040]
3、根据非固有障碍点的位置得到机器人的最大允许速度,机器人基于最大允许速度控制行走。
[0041]
由前述方法可在环境地图上得到固有障碍点集合,固有障碍物不会对机器人的行驶产生影响,机器人无需降低行驶速度。有效障碍物数据集中其余的则为非固有障碍点,对应非固有障碍物,当机器人周围有非固有障碍物时,需要降低速度避免碰撞,由非固有障碍
物的位置远近决定机器人的行走速度,因此,机器人速度的控制可根据障碍物的距离来决定,如机器人的速度与障碍物的距离可成线性关系,距离越近,速度越低;或者,机器人速度的降低速度(加速度的绝对值)与障碍物的距离成线性关系,距离越低,降低越快。
[0042]
作为其中一种实施方式,本实施例中,根据非固有障碍点的位置得到机器人的最大行驶速度,并由此控制机器人的行走速度。得到机器人的最大行驶速度的方法为:s3-1、计算环境地图上所有非固有障碍点到机器人中心的距离值,选取其中的最小距离,记为 d3;同上,非固有障碍物对应多个非固有障碍点,以距离机器人中心最近的非固有障碍点为依据来限制机器人的行驶速度。
[0043]
s3-2、计算机器人的最大允许速度v
max
,计算公式如下:,其中a为机器人的感知设定距离,单位为m;0≤d3≤a,单位为m;v
max
的单位为m/s。
[0044]
当移动机器人为室内机器人时,a可设定为3.0m。
[0045]
相比于采用最大行驶速度与障碍物距离成线性关系的计算方法,本计算方法在实际运行中平均速度要更高,而在障碍物较为接近时能做到低速行驶,提高机器人的行驶速度。得出机器人的最大允许速度后,可以以该速度行驶,也可以以小于该速度的任何速度行驶,随着机器人与非固有障碍物之间距离的变化,最大允许速度也实时变化,相应地,机器人的实际行驶速度也在最大允许速度范围内实时变化,避免以同一趋势降低速度而导致行驶效率低下。
[0046]
上列详细说明是针对本发明可行实施例的具体说明,该实施例并非用以限制本发明的专利范围,凡未脱离本发明所为的等效实施或变更,均应包含于本案的专利范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1