一种移动消毒小车行车机构
1.本发明涉及行车机构控制系统,具体涉及一种移动消毒小车行车机构。
背景技术:
2.随着计算机,微电子技术的快速发展,智能化技术的开发越来越快,智能程度也越来越高,应用的范围也得到了极大的扩展。智能小车系统以迅猛发展的汽车电子技术为背景,涵盖了电子,计算机,机械,传感技术等多个学科。同时,当今机器人技术的发展日新月异,其应用于考古,探测,国防等众多领域。无人飞船,外星探测,智能化生产等等无不得益于机器人技术的发展。一些发达国家已经把机器人设计制作竞赛作为创新教育的战略手段。从某种意义上来说,机器人技术反映的是一个国家综合技术实力的高低。与此同时,随着集成电路的发展,树莓派在图像处理以及机器控制领域发挥重要的作用,结合强大外围电路,用嵌入式编程等手段可以制作拓展性良好的移动机器人.智能小车具备环境感知、路径规划、自主控制运行状态等功能,成为移动机器人领域一个重要研究方向。
3.恰巧2020年全世界因为新冠病毒的影响,学校,商场,医院等各种人员密集性公共场所都更需要消毒杀菌,保持卫生。而“基于机器视觉的自动移动消毒小车”正是符合当下形势应运而生的新型智能化移动小车,对现实中的智能化汽车的开发,发展具有巨大的实际价值。
4.为了给医院商场等大型场所消毒,构建基于机器视觉的自动移动消毒小车模型,小车由避障小车和消毒水喷洒装置结合,可以在既定规划的线路内实现自动喷洒消毒液和陌生环境下躲避简单障碍,和摄像头监控相关的功能。 现有技术中。
技术实现要素:
5.本发明的目的在于针对现有技术中,,提供一种移动消毒小车行车机构。
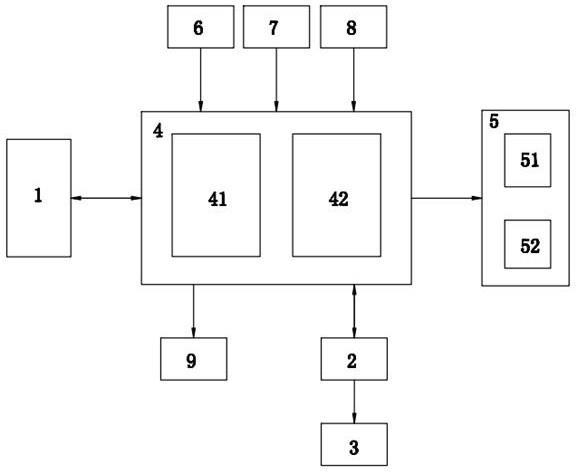
6.为实现上述目的,本发明采用以下技术方案是:一种移动消毒小车行车机构,它包括外接设备端1、电源模块2、led灯3、驱动控制主板4、动力机构5、红外传感器6、超声波传感器7、喷洒消毒模块8、usb摄像头9,所述控制端口1与驱动控制主板4相互连接,led灯3通过电源模块2与驱动控制主板4相连接,驱动控制主板4连接动力机构5,所述红外传感器6、超声波传感器7及喷洒消毒模块8与驱动控制主板4相连接,驱动控制主板4连接usb摄像头9。
7.作为本发明更具体的,所述驱动控制主板4包括了主板控制模块41、电源驱动模块42,所述主板控制模块41与电源驱动模块42电性连接。
8.作为本发明更具体的,所述外接设备端1与主板控制模块41的连接方式包括且不限于wifi连接、gprs连接、蓝牙连接和有线光缆及光纤连接。
9.作为本发明更具体的,所述动力机构5包括了舵机51、电机52,所述舵机51和电机52与电源驱动模块42电性连接。
10.作为本发明更具体的,所述的行车机构的行走判断步骤为:开始;通过外接设备端1进行控制或通过红外传感器6及超声波传感器7自动扫描控制,同时usb摄像头9启动实时
智能识别数据;驱动控制主板4上的主板控制模块41接收红外传感器6及超声波传感器7扫描出的数据和usb摄像头9识别的二维码数据,并主板控制模块41判断与计算路径;主板控制模块41将指令传达到电源驱动模块42,电源驱动模块42通过驱动控制主板4驱动动力机构5,同时启动喷洒消毒模块8和启动led灯;动力机构5并通过内舵机51将通过驱动控制主板4的指令信息调整方向,电机52通过指令信息进行前进与停止,完成指令并结束。
11.作为本发明更具体的,所述驱动控制主板4的超声波感应信息判断步骤为:获取超声波传感器7的信息,启用时间差测距法公式:s=v*
△
t/2计算超声波距离,判断超声波传感器7距离值大于0cm小于25cm;若大于25cm则进行前进;若大于0cm小于25cm则停车等待并左转等待,再次获取超声波传感器7的信息;当距离值大于25cm后继续前进。
12.作为本发明更具体的,所述驱动控制主板4的红外感应信息判断步骤为:获取红外传感器6的信息,驱动并采用颜色分辨判定法,若左右两边都至少有一个传感器扫描到黑线,则判定为停止,若否则接下一个判定。若左边至少有一个传感器扫描到黑线,右边未扫描到黑线,则判定为左转,若否则接下一个判定。若右边至少有一个传感器扫描到黑线,左边未扫描到黑线,则判定为右转,若无以上三种情况,则判定为直行前进,并重新启动采用颜色分辨判定法继续判定。
13.本发明的工作原理:当需要使用设备时,工作人员应当保证电源模块2能够提供足够的电力,在电源模块2电力足够时,工作人员将可以正常使用设备,进行使用时,工作人员可通过外接设备端1进行人为控制,外接设备端1可以为移动端和pc端,通过外接设备端1控制舵机51和电机52,并通过喷洒消毒模块8进行环境的消毒作业,而当设备进行自动化运行时usb摄像头9会自动识别的二维码数据,同时红外传感器6和超声波传感器7获取外界信息,所述驱动控制主板4的红外感应信息判断步骤为:获取红外传感器6的信息,驱动并采用颜色分辨判定法,若左右两边都至少有一个传感器扫描到黑线,则判定为停止,若否则接下一个判定。若左边至少有一个传感器扫描到黑线,右边未扫描到黑线,则判定为左转,若否则接下一个判定。若右边至少有一个传感器扫描到黑线,左边未扫描到黑线,则判定为右转,若无以上三种情况,则判定为直行前进,并重新启动采用颜色分辨判定法继续判定。所述驱动控制主板4的超声波感应信息判断步骤为:获取超声波传感器7的信息,启用时间差测距法公式:s=v*
△
t/2计算超声波距离,判断超声波传感器7距离值大于0cm小于25cm;若大于25cm则进行前进;若大于0cm小于25cm则停车等待并左转等待,再次获取超声波传感器7的信息;当距离值大于25cm后继续前进;驱动控制主板4上的主板控制模块41接收红外传感器6及超声波传感器7扫描出的数据和usb摄像头9识别的二维码数据,并主板控制模块41判断与计算路径,主板控制模块41将指令传达到电源驱动模块42,电源驱动模块42通过驱动控制主板4驱动动力机构5,同时启动喷洒消毒模块8和启动led灯,动力机构5并通过内舵机51将通过驱动控制主板4的指令信息调整方向,电机52通过指令信息进行前进与停止,小车的四轮上均设置了电机52,同时电机52两个为一组并联控制,指令完成后,使用者可以通过外接设备端1查看usb摄像头9传输的实时图像信息,方便使用人员实时处理相关信息。
14.采用上述技术方案后,本发明有益效果为:设备具有自动化运行,能够自行避障、实时图像传输及目标检测等多项功能,能通过外部端口设备进行控制,且行车机构的运行方式合理快捷,同时进行周围环境的消毒作业,更好的帮助人们进行环境的消毒作业,提高小车行驶效率,防止小车受到障碍物碰撞。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
16.图1是本发明的结构示意图。
17.图2是本发明的流程框图。
18.图3是本发明超声波传感器7的判定流程框图。
19.图4是本发明红外传感器6的判定流程框图。
20.附图标记说明:外接设备端1、电源模块2、led灯3、驱动控制主板4、动力机构5、红外传感器6、超声波传感器7、喷洒消毒模块8、usb摄像头9、主板控制模块41、电源驱动模块42、舵机51、电机52。
具体实施方式
21.参看图1
‑
图4所示,本具体实施方式采用的技术方案是:它包括外接设备端1、电源模块2、led灯3、驱动控制主板4、动力机构5、红外传感器6、超声波传感器7、喷洒消毒模块8、usb摄像头9,所述控制端口1与驱动控制主板4相互连接,led灯3通过电源模块2与驱动控制主板4相连接,驱动控制主板4连接动力机构5,所述红外传感器6、超声波传感器7及喷洒消毒模块8与驱动控制主板4相连接,驱动控制主板4连接usb摄像头9,所述外接设备端1与主板控制模块41的连接方式包括且不限于wifi连接、gprs连接、蓝牙连接和有线光缆及光纤连接。所述驱动控制主板4包括了主板控制模块41、电源驱动模块42,所述主板控制模块41与电源驱动模块42电性连接,所述动力机构5包括了舵机51、电机52,所述舵机51和电机52与电源驱动模块42电性连接。
22.所述的行车机构的行走判断步骤为:开始;通过外接设备端1进行控制或通过红外传感器6及超声波传感器7自动扫描控制,同时usb摄像头9启动实时智能识别数据;驱动控制主板4上的主板控制模块41接收红外传感器6及超声波传感器7扫描出的数据和usb摄像头9识别的二维码数据,并主板控制模块41判断与计算路径;主板控制模块41将指令传达到电源驱动模块42,电源驱动模块42通过驱动控制主板4驱动动力机构5,同时启动喷洒消毒模块8和启动led灯;动力机构5并通过内舵机51将通过驱动控制主板4的指令信息调整方向,电机52通过指令信息进行前进与停止;完成指令并结束。
23.所述驱动控制主板4的超声波感应信息判断步骤为:获取超声波传感器7的信息;启用时间差测距法公式:s=v*
△
t/2计算超声波距离;判断超声波传感器7距离值大于0cm小于25cm;若大于25cm则进行前进;若大于0cm小于25cm则停车等待并左转等待,再次获取超声波传感器7的信息;当距离值大于25cm后继续前进。
24.所述驱动控制主板4的红外感应信息判断步骤为:获取红外传感器6的信息,驱动并采用颜色分辨判定法,若左右两边都至少有一个传感器扫描到黑线,则判定为停止,若否则接下一个判定。若左边至少有一个传感器扫描到黑线,右边未扫描到黑线,则判定为左转,若否则接下一个判定。若右边至少有一个传感器扫描到黑线,左边未扫描到黑线,则判
定为右转,若无以上三种情况,则判定为直行前进,并重新启动采用颜色分辨判定法继续判定。
25.本发明工作原理:当需要使用设备时,工作人员应当保证电源模块2能够提供足够的电力,在电源模块2电力足够时,工作人员将可以正常使用设备,进行使用时,工作人员可通过外接设备端1进行人为控制,外接设备端1可以为移动端和pc端,通过外接设备端1控制舵机51和电机52,并通过喷洒消毒模块8进行环境的消毒作业,而当设备进行自动化运行时usb摄像头9会自动识别的二维码数据,同时红外传感器6和超声波传感器7获取外界信息,所述驱动控制主板4的红外感应信息判断步骤为:获取红外传感器6的信息,驱动并采用颜色分辨判定法,若左右两边都至少有一个传感器扫描到黑线,则判定为停止,若否则接下一个判定。若左边至少有一个传感器扫描到黑线,右边未扫描到黑线,则判定为左转,若否则接下一个判定。若右边至少有一个传感器扫描到黑线,左边未扫描到黑线,则判定为右转,若无以上三种情况,则判定为直行前进,并重新启动采用颜色分辨判定法继续判定。所述驱动控制主板4的超声波感应信息判断步骤为:获取超声波传感器7的信息,启用时间差测距法公式:s=v*
△
t/2计算超声波距离,判断超声波传感器7距离值大于0cm小于25cm;若大于25cm则进行前进;若大于0cm小于25cm则停车等待并左转等待,再次获取超声波传感器7的信息;当距离值大于25cm后继续前进;驱动控制主板4上的主板控制模块41接收红外传感器6及超声波传感器7扫描出的数据和usb摄像头9识别的二维码数据,并主板控制模块41判断与计算路径,主板控制模块41将指令传达到电源驱动模块42,电源驱动模块42通过驱动控制主板4驱动动力机构5,同时启动喷洒消毒模块8和启动led灯,动力机构5并通过内舵机51将通过驱动控制主板4的指令信息调整方向,电机52通过指令信息进行前进与停止,小车的四轮上均设置了电机52,同时电机52两个为一组并联控制,指令完成后,使用者可以通过外接设备端1查看usb摄像头9传输的实时图像信息,方便使用人员实时处理相关信息。
26.以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1