面向宽域飞行的多模态精确划分方法
1.本发明属于航空航天技术领域,特别是涉及一种面向宽域飞行的多模态精确划分方法。
背景技术:
2.随着航空航天技术的快速发展,飞行器的包线越来越宽,使得飞行器从地面水平起飞并进行宽域飞行成为了可能。飞行器在宽域爬升过程中,速度不断增加至高超声速,将在远程快速运输、太空旅行、全球快速打击等方面发挥重要作用。
3.宽域飞行过程中,飞行器可能面临不同的动力模式、气动构型和飞行任务,导致存在多种飞行模态。多模态是飞行器宽域爬升过程的普遍特性,需要针对不同模态建立不同的模型并设计不同的控制器,因此飞行器宽域爬升过程是多模态飞行控制器的切换过程,多模态的精确划分和识别对飞行器切换控制系统设计至关重要。宽域飞行过程包含多个稳定飞行模态,不同的稳定模态之间存在不同的过渡模态,已有工作多根据经验进行宽域飞行模态划分且忽略过渡模态,无法实现多模态的精确划分识别和相邻稳定模态间的平稳转换,安全性较差,不利于工程实现。因此研究面向宽域飞行的多模态精确划分方法对于飞行多模态切换控制研究意义重大且有着迫切需求。
技术实现要素:
4.要解决的技术问题
5.为了克服现有飞行多模态划分方法实用性差的不足,本发明提供一种面向宽域飞行的多模态精确划分方法。
6.技术方案
7.一种面向宽域飞行的多模态精确划分方法,其特征在于步骤如下:
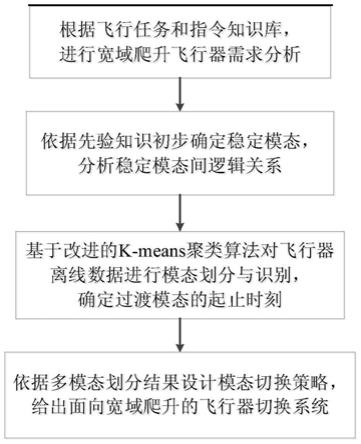
8.步骤1:基于飞行任务和指令知识库,对飞行器宽域爬升过程中的需求进行分析,确定影响飞行多模态划分的关键因素,作为模态指示变量;
9.步骤2:充分考虑模态识别的经验风险,依据先验知识进行稳定模态的初步确定,给出飞行器宽域爬升的稳定模态个数n0和每个稳定模态的运行时间s
n
,n=1,2,
…
,n0,进一步分析多模态间逻辑关系,保证模态按照实际的时序排列;
10.步骤3:基于改进的k
‑
means聚类算法对飞行器离线数据进行模态划分与识别,实现稳定模态和过渡模态的准确划分;
11.步骤4:基于划分的多个稳定模态建立多模态模型集,基于过渡模态设计模态切换策略,结合多模态模型集和模态切换策略构建面向宽域爬升的飞行器切换系统;
12.将面向宽域爬升的飞行器系统写成如下所示的多输入多输出切换系统
13.14.其中,x
i
,i=1,2,
…
,n为状态变量,f
i,σ(t)
和g
i,σ(t)
为非线性函数,u
σ(t)
为控制输入,σ(t):[0,∞)
→
m={1,2,
…
,m}为切换信号;
[0015]
对于切换信号而言,其个数m等于划分的稳定模态个数n0,其切换策略具体描述为:切换信号依据多模态过程时序进行切换,在稳定模态内,调用相应的模态模型并设计控制器;在过渡模态内,由于过渡模态时间很短,如果过渡模态起始时刻在前序稳定模态的最后一个窗口内,则调用前序稳定模态对应的模型,如果过渡模态起始时刻在过渡模态的第一个窗口内,则调用后序稳定模态对应的模型,同时设计软切换控制。
[0016]
本发明进一步的技术方案为:步骤3具体过程如下所示:
[0017]
(a)窗口切割
[0018]
选取长度为h的切割窗口对二维飞行数据矩阵x沿采样方向进行切割,则有
[0019]
n=k
×
h+d
ꢀꢀꢀ
(1)
[0020]
其中,n为采样数据个数,k为切割窗口个数,d为未被切割的采样数据且有0≤d≤h;
[0021]
将切割得到的窗口数据二维矩阵记为求取这些二维矩阵的均值向量作为模态划分的基本单元;
[0022]
(b)聚类处理
[0023]
利用改进的k
‑
means聚类算法对窗口均值向量进行聚类,算法的输入是窗口均值向量集合和两个子类聚类中心的最小距离阈值θ,算法的输出是每个窗口属于不同子类的隶属关系和子类个数c
st
;
[0024]
因此,通过该算法可将整个多模态过程聚类成个c
st
子类;
[0025]
(c)时段划分
[0026]
按照窗口均值向量排列的时间顺序,将时间上连续且属于同一个子类的窗口单元划分到同一个时段中;
[0027]
将划分后的子时段记为其中m0为划分的时段个数。则每个子时段属于不同子类的隶属关系为
[0028][0029]
其中,c为聚类出的子类;
[0030]
将子时段的时间长度记为用于飞行器稳定模态的确定;
[0031]
(d)稳定模态确定
[0032]
基于步骤2中各模态的运行时间确定稳定模态最短运行时间为
[0033]
s
min
=min{s1,s2,
…
,s
n
}
ꢀꢀꢀ
(3)
[0034]
通过对比子时段时间长度和稳定模态最短运行时间s
min
来确定稳定模态
[0035][0036]
其中将隶属于同一子类的稳定模态定义为同一种稳定模态;
[0037]
进一步引入步骤2中的稳定模态时间区间对识别出的稳定模态进行分析,如果识别出的稳定模态在相应的时间区间内,则归属为该特定的稳定模态;
[0038]
(e)模态精准划分
[0039]
深入分析稳定模态与过渡模态相邻的窗口,判断过渡模态的起始时刻发生在前序稳定模态的最后一个窗口后半段或过渡模态的第一个窗口前半段,过渡模态的结束时刻发生在过渡模态的最后一个窗口后半段或后序稳定模态的第一个窗口前半段;
[0040]
对于过渡模态起始时刻的确认,假设模态从第k1个窗口开始转变,需要从前序稳定模态最后一个窗口即第k1‑
1个窗口开始用较短的滑动窗口l重新分析判断,滑动步长为h;
[0041]
进一步对两个窗口分析得到的小滑动窗口求取均值,将小滑动窗口的均值记为
[0042]
定义滑动窗口与前序稳定模态的相似度为
[0043][0044]
其中,为前序稳定模态的变量均值,j为多模态过程变量个数;
[0045]
引入相似度阈值α作为边界参数,分析每个相似度和阈值关系,过渡模态起始时刻的认定规则为
[0046][0047]
上述规则表述为当从第t1个小窗口开始连续有r个小窗口都满足γ
t
<α,则认为多模态过程从第t1个小窗口进入到过渡模态;
[0048]
因此将第t1个小窗口的起始位置作为过渡模态的开始,则此过渡模态的起始时刻为(k1‑
2)
×
h+(t1‑
1)
×
h+1;
[0049]
对于过渡模态结束时刻的确认,假设模态从第k2个窗口开始转变,需要从过渡模态最后一个窗口即第k2‑
1个窗口开始用较短的滑动窗口l重新分析判断,滑动步长为h;
[0050]
进一步对两个窗口分析得到的小滑动窗口求取均值,将小滑动窗口的均值记为
[0051]
定义滑动窗口与后序稳定模态的相似度为
[0052][0053]
其中,为后序稳定模态的变量均值;
[0054]
分析每个相似度和阈值关系,过渡模态结束时刻的认定规则为
[0055][0056]
上述规则表述为当从第t2个小窗口开始连续有r个小窗口都满足γ
t
≥α,则认为多
模态过程从第t2个小窗口进入到后序稳定模态;
[0057]
因此将第t2个小窗口的起始位置作为过渡模态的结束,则此过渡模态的结束时刻为(k2‑
2)
×
h+(t2‑
1)
×
h+1。
[0058]
有益效果
[0059]
本发明提出的一种面向宽域飞行的多模态精确划分方法。该方法分析飞行器宽域爬升过程需求,依据先验知识进行稳定模态的初步确定,进一步基于改进的k
‑
means聚类算法实现稳定模态和过渡模态的准确划分,最后结合多模态模型集和模态切换策略构建面向宽域飞行的多模态切换系统,便于工程实现。有益效果具体如下:
[0060]
(1)在经验确定飞行器稳定模态基础上引入了基于飞行数据的聚类算法,减小了模态划分的经验风险;
[0061]
(2)利用经验划分的稳定模态时间区间对聚类出的稳定模态进行了比照处理,实现了稳定模态的类别归属;
[0062]
(3)将宽域爬升飞行器转化为切换系统,通过多模态精确划分给出了切换信号的切换策略,保证了多模态间平滑切换。
附图说明
[0063]
图1为本发明实施流程图。
具体实施方式
[0064]
现结合实施例、附图对本发明作进一步描述:
[0065]
参照图1,本发明面向宽域飞行的多模态精确划分方法具体步骤如下:
[0066]
步骤1:考虑一类火箭基组合循环(rocket based combined cycle,rbcc)空天飞行器,该飞行器的主要飞行任务是水平起飞爬升到30km以上的高度,同时速度达到20马赫左右;
[0067]
空天飞行器在爬升过程中历经稠密大气、临近空间的极宽空域,不同飞行区间的环境差异较大,对动力系统提出了适应宽域工作、综合油耗低、推重比高等极高要求,单一动力无法满足,因此需要采取组合动力的方式接力爬升,保证飞行器在各个飞行区间都能达到最佳的推力性能;不同的动力系统对应不同的工作模态、引发不同的飞行模态,因此空天飞行器宽域爬升过程是多模态过程;
[0068]
通过上述需求分析确定空天飞行器组合动力工作方式为多模态划分的关键影响因素,可作为模态指示变量;
[0069]
步骤2:rbcc空天飞行器将火箭发动机和冲压发动机组合在同一流道内,利用火箭射流和冲压流道形成了新的热力循环方式;基于已有研究将rbcc空天飞行器宽域爬升过程划分为引射模态、亚燃冲压模态、超燃冲压模态和火箭模态共4个稳定模态,每个稳定模态的运行时间为s
n
,n=1,2,3,4。这4个稳定模态依次工作,其中0~2.5马赫时为引射模态、2.5~6马赫时为亚燃冲压模态、6~10马赫时为超燃冲压模态、10~20马赫时为火箭模态,可依据飞行样本数据刻画出速度
‑
时间曲线,进而确定各稳定模态的时间区间;
[0070]
步骤3:基于改进的k
‑
means聚类算法对rbcc空天飞行器离线数据进行模态划分与识别,实现稳定模态和过渡模态的准确划分,具体过程如下所示
[0071]
(a)窗口切割
[0072]
选取长度为h的切割窗口对二维飞行数据矩阵x沿采样方向进行切割,则有
[0073]
n=k
×
h+d
ꢀꢀꢀ
(1)
[0074]
其中,n为采样数据个数,k为切割窗口个数,d为未被切割的采样数据且有0≤d≤h;
[0075]
将切割得到的窗口数据二维矩阵记为k=1,2,
…
,k,求取这些二维矩阵的均值向量x
k
作为模态划分的基本单元;
[0076]
(b)聚类处理
[0077]
利用改进的k
‑
means聚类算法对窗口均值向量进行聚类,算法的输入是窗口均值向量集合和两个子类聚类中心的最小距离阈值θ,算法的输出是每个窗口属于不同子类的隶属关系和子类个数c
st
;
[0078]
因此,通过该算法可将整个多模态过程聚类成个c
st
子类;
[0079]
(c)时段划分
[0080]
按照窗口均值向量排列的时间顺序,将时间上连续且属于同一个子类的窗口单元划分到同一个时段中;
[0081]
将划分后的子时段记为其中m0为划分的时段个数;则每个子时段属于不同子类的隶属关系为
[0082][0083]
其中,c为聚类出的子类;
[0084]
将子时段的时间长度记为用于飞行器稳定模态的确定;
[0085]
(d)稳定模态确定
[0086]
基于步骤2中各模态的运行时间确定稳定模态最短运行时间为
[0087]
s
min
=min{s1,s2,s3,s4}
ꢀꢀꢀ
(3)
[0088]
通过对比子时段时间长度和稳定模态最短运行时间s
min
来确定稳定模态
[0089][0090]
其中将隶属于同一子类的稳定模态定义为同一种稳定模态;
[0091]
进一步引入步骤2中的稳定模态时间区间对识别出的稳定模态进行分析,如果识别出的稳定模态在相应的时间区间内,则归属为该特定的稳定模态;
[0092]
(e)模态精准划分
[0093]
深入分析稳定模态与过渡模态相邻的窗口,判断过渡模态的起始时刻发生在前序稳定模态的最后一个窗口后半段或过渡模态的第一个窗口前半段,过渡模态的结束时刻发生在过渡模态的最后一个窗口后半段或后序稳定模态的第一个窗口前半段;
[0094]
对于过渡模态起始时刻的确认,假设模态从第k1个窗口开始转变,需要从前序稳定模态最后一个窗口即第k1‑
1个窗口开始用较短的滑动窗口l重新分析判断,滑动步长为h;
[0095]
进一步对两个窗口分析得到的小滑动窗口求取均值,将小滑动窗口的均值记为
[0096]
定义滑动窗口与前序稳定模态的相似度为
[0097][0098]
其中,为前序稳定模态的变量均值,j为多模态过程变量个数;
[0099]
引入相似度阈值α作为边界参数,分析每个相似度和阈值关系,过渡模态起始时刻的认定规则为
[0100][0101]
上述规则表述为当从第t1个小窗口开始连续有r个小窗口都满足γ
t
<α,则认为多模态过程从第t1个小窗口进入到过渡模态;
[0102]
因此将第t1个小窗口的起始位置作为过渡模态的开始,则此过渡模态的起始时刻为(k1‑
2)
×
h+(t1‑
1)
×
h+1;
[0103]
对于过渡模态结束时刻的确认,假设模态从第k2个窗口开始转变,需要从过渡模态最后一个窗口即第k2‑
1个窗口开始用较短的滑动窗口l重新分析判断,滑动步长为h;
[0104]
进一步对两个窗口分析得到的小滑动窗口求取均值,将小滑动窗口的均值记为
[0105]
定义滑动窗口与后序稳定模态的相似度为
[0106][0107]
其中,为后序稳定模态的变量均值;
[0108]
分析每个相似度和阈值关系,过渡模态结束时刻的认定规则为
[0109][0110]
上述规则表述为当从第t2个小窗口开始连续有r个小窗口都满足γ
t
≥α,则认为多模态过程从第t2个小窗口进入到后序稳定模态;
[0111]
因此将第t2个小窗口的起始位置作为过渡模态的结束,则此过渡模态的结束时刻为(k2‑
2)
×
h+(t2‑
1)
×
h+1;
[0112]
步骤4:基于划分的4个稳定模态建立多模态模型集,基于过渡模态设计模态切换策略,结合多模态模型集和模态切换策略构建rbcc空天飞行器切换系统;
[0113]
将rbcc空天飞行器系统写成如下所示的多输入多输出切换系统
[0114]
[0115]
其中,三通道姿态角x1=[θ ψ φ]
τ
和姿态角速度x2=[ω
x ω
y ω
z
]
τ
为状态变量,θ,ψ,φ,ω
x
,ω
y
和ω
z
分别为俯仰角、偏航角、滚转角、滚转角速度、偏航角速度和俯仰角速度;u
σ(t)
=[δ
x,σ(t) δ
y,σ(t) δ
z,σ(t)
]
τ
为控制输入,δ
i,σ(t)
,i=x,y,z分别为滚转舵偏、偏航舵偏和俯仰舵偏;σ(t)∈{1,2,3,4}为切换信号,依次对应引射模态、亚燃冲压模态、超燃冲压模态和火箭模态;
[0116]
非线性函数如下所示:
[0117]
f
1,σ(t)
=0
[0118][0119][0120][0121]
其中,j
i
,i=x,y,z分别为x,y和z方向转动惯量;q为动压,s=334.73m2为参考面积;l
b
=18.288m分别为侧向,l
c
=24.384m为纵向参考长度;α为攻角,β为侧滑角;为气动力系数,δ项包括了参数、模型不确定性以及线性化误差;
[0122]
该切换信号对应划分的4个稳定模态,其切换策略具体描述为:切换信号依据多模态过程时序进行切换,在稳定模态内,调用相应的模态模型并设计控制器;在过渡模态内,由于过渡模态时间很短,如果过渡模态起始时刻在前序稳定模态的最后一个窗口内,则调用前序稳定模态对应的模型,如果过渡模态起始时刻在过渡模态的第一个窗口内,则调用后序稳定模态对应的模型,同时设计软切换控制。
[0123]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1