一种旋流井行车取料模型控制算法的制作方法
1.本发明涉及一种计算方法,特别是一种适用于旋流井行车的取料模型控制算法。
背景技术:
2.钢铁冶金连铸和轧钢过程中产生并冲刷到旋流井的氧化铁皮,通过行车抓斗抓取并存放在料池中。当料池中的氧化铁皮料堆对外运输时,还需要通过行车对物料进行装车。由于缺乏氧化铁皮料池物料自动装车控制系统,因此装车控制一般采用人工操作实现。
3.物料装车自动化程度低的核心原因在于难以建立适应工业实际的氧化铁皮料池堆取料料堆模型。通过采用激光扫描辅助图像识别,复杂的计算机建模,对料堆进行分析,获取最佳取料位置,可以实现对料堆的自动取料,但这一过程控制复杂,开发周期长,成本成本高,故国内还未有成功的工业应用案例。
4.因此,本领域急需一种摆脱激光扫描辅助图像识别技术,相对简单使用的取料模型应用。
技术实现要素:
5.本发明的技术任务是针对以上现有技术的不足,提供一种的旋流井行车取料模型控制算法,实现料堆的自动取料控制和料堆模型重构,然后通过行车自动控制抓斗实现对氧化铁皮料堆的自动抓取。
6.本发明解决其技术问题的技术方案是:一种旋流井行车取料模型控制算法,其特征在于:包括料堆模型建立和取料模型控制;
7.(1)所述的料堆模型建立包括料堆三维模型规划设定和塌方斜率设定,
8.所述的料堆三维模型规划设定:将料池划分为n
×
m个点阵,每个点阵均记录物料高度,将料池构建为一个三维区域的数学模型,模型精度为点阵间距离;
9.所述的料堆模型满足塌方斜率,即相邻点阵的斜率(高度差/点阵距离)≤tag(α);α大小在30
°
~70
°
之间;
10.(2)取料模型控制包括:抓斗状态判断、抓斗取料影响区域、抓斗范围内点阵高度修正、抓斗范围外围一圈点阵高度修正。
11.上述的抓斗状态判断中,支撑缆和闭合缆高度一致,作为抓斗闭合的判断依据;支撑缆和闭合缆的高度差作为抓斗张开的判断依据。
12.上述的抓斗取料影响区域:抓斗张开区域进行取料,抓斗一次取料后,不考虑塌方因素,其对料堆的影响区域为抓斗张开区域内;如果料面不平,抓料影响区域大部分在高料位侧,低料位侧影响较小。
13.上述的抓斗范围内点阵高度修正中,点阵高度修正公式为:修正点阵高度h=抓料后抓斗中心点高度h0+距离系数df
×
高度差hb
×
(1
‑
抓斗面积占比sp);其中,所述的抓料后抓斗中心点高度h0为抓斗重量减轻为0时的高度;所述的距离系数df根据抓斗中心点与点阵中心点距离d确定,函数关系式为指数函数,距离越近越趋近于0,表示该点阵高度与抓料
后高度一致;所述的高度差hb,hb=点阵原高度
‑
抓料后抓斗中心点高度h0;所述的抓斗面积占比sp是指抓料时,抓点影响区域在该点阵中面积占比;根据点阵高度修正公式计算修正点阵高度后,还需要对点阵高度根据塌方斜率进行一次修正:斜率k=|h
‑
h0|/d;若k≤tag(α),则:接收修正点阵高度;若k>tag(α),则:修正后的点阵高度为:抓料后抓斗中心点高度h0+d
×
tag(α)。
14.上述的抓斗范围外围一圈点阵高度修正为:取料完成后,根据取料中心点位置和高度计算取料中心点到外围一圈各点阵物料高度斜率,对超过塌方斜率的点阵进行修正:外围点阵与抓斗中心点高度进行斜率比较,当斜率小于塌方斜率时,外围点高度将不进行修改,否则按塌方斜率进行修正。
15.与现有技术相比较,本发明具有以下突出的有益效果:
16.1、将氧化铁皮料堆进行有限的物料空间网格化,当物料取料时,根据本发明取料模型控制算法,实现了对料堆的自动取料选点、取料控制及料堆模型更新,保证取料后料堆模型的一致性,即使在驾驶室手动操作模式下,模型也能自动修正点阵模型,确保了料堆模型的实时性和准确性;
17.2、本系统是一种不依赖激光扫描和图像识别的采用plc实现的一种取料模型控制算法,开发成本和运营成本低。
附图说明
18.图1是本发明的平面取料抓斗控制状态图。
19.图2本发明的斜面取料过程及物料分布。
20.图3是本发明的一次抓斗取料影响点阵分布图。
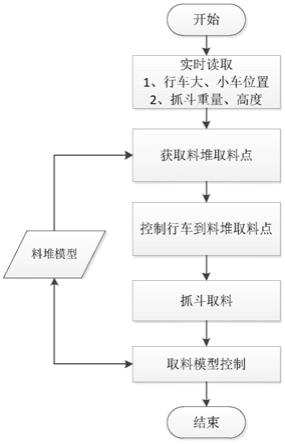
21.图4是本发明的取料控制过程。
具体实施方式
22.下面结合说明书附图和具体实施方式对本发明进一步说明。
23.本发明包括通过建立料堆模型,并设计一种取料模型控制算法,实现料池物料的自动取料控制。
24.1、料堆模型建立
25.(1)料堆三维模型规划设定
26.将料池划分为n
×
m个点阵。每个点阵均记录物料高度,这样将料池构建为一个三维区域的数学模型,模型精度为点阵间距离,点阵数量越多,越能反应料池中料堆模型,料堆模型越精确。但是抓斗在对物料进行堆、取料控制时,抓斗控制范围内的物料高度基本相同,过多数量的三维点阵增加了plc计算量和存储空间,故点阵宽度,也即点阵距离,一般取抓斗张开宽度为宜。
27.(2)塌方斜率设定
28.氧化铁皮料堆模型与沙堆模型一致,在取料过程中当氧化铁皮堆的高度达到一定程度以后,一小点的氧化铁皮落下可能引发整个料堆的崩塌,并向四周扩散。料堆崩塌时料堆坡面斜角α就是取料最大坡度,根据氧化铁皮特性,选取α大小在30
°
~70
°
之间,优化方案中为35
°
~50
°
,料堆坡面斜率为tag(α)。
29.料堆模型满足塌方斜率,即相邻点阵的斜率(高度差/点阵距离)≤tag(α)。
30.2、取料模型控制
31.(1)抓斗状态判断
32.抓斗的控制通过由支撑缆1和闭合缆2实现。抓斗控制状态见图1,图1
‑
a为张开状态,图1
‑
b为中间状态,图1
‑
c为闭合状态。
33.抓斗闭合时,支撑缆1和闭合缆2高度一致,这作为抓斗闭合的判断依据。
34.抓斗在闭合状态下,当闭合缆2向下降时,抓斗因重力作用,抓斗逐渐张开,直至最大张开位置,这时支撑缆1和闭合缆2的高度差作为抓斗张开的判断依据。
35.抓斗闭合过程与之相反。
36.抓斗整体升降时(不对抓斗进行开合动作),则支撑缆1和闭合缆2同时执行同一动作,即同升或同降。
37.(2)抓斗取料影响区域
38.抓斗在取料时,按抓斗张开区域进行取料,抓斗一次取料后,不考虑塌方因素,其对料堆的影响区域为抓斗张开区域内。
39.如果料面不平,其过程如图2所示。在抓料过程中,闭合缆2提升,导致抓斗在高料位侧向下抓料,而低料位侧抓斗提升,抓料能力减弱,最终抓料影响区域大部分在高料位侧,低料位侧影响较小。
40.(3)抓斗范围内点阵高度修正
41.一次抓料后,影响区域以抓斗中心四周四个点阵,影响的点阵为图3右下标有h11、h12、h21、h22的四个点阵。抓斗中心点高度为h,影响四个点的原高度为h11、h12、h21、h22。抓斗中心点到4个点阵中心点距离分别为d11、d12、d21、d22。当然存在中心点位于料池的边缘或4个角落的情况,这是影响区域为2个或单个点阵(在角落是为单个),需要对这种特殊情况进行考虑,其取料高度模型计算方法与四个点是一致的。
42.点阵高度修正公式为:
43.修正点阵高度h=抓料后抓斗中心点高度h0+距离系数df
×
高度差hb
×
(1
‑
抓斗面积占比sp)。
44.a)抓料后抓斗中心点高度h0
45.抓斗抓料时,抓斗降落,当重量减轻为0时,表示抓斗已落到位,这时闭合缆2提升,开始抓料,直至抓斗闭合,取这时支撑缆1的高度即为取料后的物料高度。
46.b)距离系数df
47.距离系数根据抓斗中心点与点阵中心点距离d(四个点阵分别为:d11、d12、d21、d22)确定,函数关系式为指数函数,距离越近越趋近于0,表示该点阵高度与抓料后高度一致。
48.c)高度差hb
49.hb=点阵原高度
‑
抓料后抓斗中心点高度h0
50.d)抓斗面积占比sp
51.抓斗面积占比是指抓料时,抓点影响区域在该点阵中面积占比。等于1表示完全覆盖。
52.根据上述公式计算修正点阵高度后,还需要对点阵高度根据塌方斜率进行一次修
正,即修正后的点阵高度h与抓料后抓斗中心点高度h0满足塌方斜率。
53.首先计算斜率k=|h
‑
h0|/d。再根据k进行分析:
54.若,k≤tag(α),则:接收修正点阵高度。
55.若,k>tag(α),则:修正后的点阵高度为:抓料后抓斗中心点高度h0+d
×
tag(α)
56.(4)抓斗范围外围一圈点阵高度修正
57.取料完成后,即可获得了取料中心点位置和高度,计算取料中心点到外围一圈各点阵物料高度斜率,对超过塌方斜率的点阵进行修正。
58.外围点阵与抓斗中心点高度进行斜率比较,当斜率小于塌方斜率时,外围点高度将不进行修改,否则按塌方斜率进行修正。
59.具体实施方式如下:
60.行车在进行一次取料动作后,系统自动根据抓斗的位置、高度、重量,自动对点阵进行高度修正,以确保取料点阵高度的准确性。过程控制见图4,过程详细描述如下:
61.(1)实时数据获取
62.实时读取行车大小车位置、抓斗高度、抓斗重量、抓斗高度数据。
63.(2)获取取料点
64.取料点为点阵中,位置最高的点阵。
65.(3)控制行车到取料点位置
66.获取到取料点后,控制行车大小车到点阵位置。
67.(4)抓斗取料
68.行车运行到取料点后,抓斗张开,抓斗张开后,开始下降,当抓斗重量减到0时,表示抓斗完全触碰到物料,抓斗停止下降,这时抓斗闭合缆2动作,开始抓料,当抓斗闭合到位,闭合缆2停止动作,表示抓斗抓料成功,这时抓斗高度,即为抓料后抓斗中心点高度h0。
69.(5)料堆的取料模型更新
70.抓斗闭合后,表示抓料成功,立即对料堆模型,根据取料模型控制算法对点阵高度进行修正,完成一次取料后的料堆模型更新。
71.需要说明的是,本实施例中未作详细说明之处,为本领域公知的技术。在上文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明申请实施例的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。
72.本发明的特定实施方案已经对本发明进行了详细描述,对于本领域的技术人员来说,在不背离本发明的精神和范围的情况下对它进行的各种显而易见的改变都在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1