一种移动机巢候选起飞点获取方法与流程
1.本发明涉及移动机巢候的选起飞点选取技术领域,具体涉及一种移动机巢候选起飞点获取方法。
背景技术:
2.现有的移动机巢规划任务主要通过人工方式实现,即预先针对巡检线路环境,获取当前线路环境下的地形数据、道路数据以及巡检线路等信息,通过目视和经验方法通过人工规划和圈定起飞位置,经多次规划获得合适的起飞点位置或区域,因此一般得到的起飞点位置都只能对应巡检一个目标巡检杆塔。因此选出的起飞点位置的无法将无人机巢的无人机数量合理利用,导致巡检效率低。
技术实现要素:
3.本发明的目的在于克服现有技术中的缺点与不足,提供一种移动机巢候选起飞点获取方法,可以快速获得对应至少两个目标巡检杆塔的目标起飞点,使用户在一个目标起飞点使用多架无人机对多个目标巡检杆塔进行巡检,提高巡检效率。
4.本发明的一个实施例提供一种移动机巢候选起飞点获取方法,其中,所述移动机巢包括至少一个无人机,包括以下步骤:
5.获取若干个目标巡检杆塔的位置信息以及所述目标巡检杆塔对应的巡检耗时;
6.根据所述无人机的最大飞行时长、平均飞行速度以及所述目标巡检杆的巡检耗时,得到所述无人机相对于各个所述目标巡检杆塔的剩余可飞行距离;
7.根据所述无人机相对于各个所述目标巡检杆塔的剩余可飞行距离以及预设的剩余可飞行距离与候选起飞区的关系,确定各个所述目标巡检杆塔对应的候选起飞区;
8.根据各个所述候选起飞区与道路网的交集,获得各个所述目标巡检杆塔对应的第一候选起飞点集合;
9.若各个所述第一候选起飞点集合之间存在交集,将各个所述第一候选起飞点集合之间的交集作为第二候选起飞点集合;
10.将所述第二候选起飞点集合中的各个第二起飞点确定为对应的所述目标巡检杆塔的目标起飞点。
11.相对于现有技术,本发明的移动机巢候选起飞点获取方法根据所述无人机的飞行参数和所述目标巡检杆的巡检耗时得到候选起飞去,然后通过各个所述候选起飞区与道路网的交集得到多个方便运输使用所述无人机的第一候选起飞点集合,再将各个所述第一候选起飞点集合之间的交集作为第二候选起飞点集合,以得到对应至少两个目标巡检杆塔的目标起飞点。实现了快速获得对应至少两个目标巡检杆塔的目标起飞点,使用户在一个目标起飞点使用多架无人机对多个目标巡检杆塔进行巡检,从而提高巡检效率的效果。
12.进一步,所述将所述第二候选起飞点集合中的各个第二起飞点确定为对应的所述目标巡检杆塔的目标起飞点后,还包括以下步骤:
13.获取所述移动机巢搭载的无人机数量;
14.根据所述目标起飞点对应的所述目标巡检杆塔的数量和所述移动机巢搭载的无人机数量,确定以所述目标起飞点作为所述移动机巢的起飞位置时,巡检所有目标巡检杆塔对应的所述移动机巢的需求量。可以让用户知道以所述目标起飞点作为所述移动机巢的起飞位置时需要的所述移动机巢的需求量,有利于用户安排足够的所述移动机巢以实现同时巡检所述目标起飞点对应的所有所述目标巡检塔,从而提高巡检效率。
15.进一步,所述根据所述目标起飞点对应的所述目标巡检杆塔的数量和所述移动机巢搭载的无人机数量,确定以所述目标起飞点作为所述移动机巢的起飞位置时,巡检所有目标巡检杆塔对应的所述移动机巢的需求量,包括以下步骤:
16.将所述目标起飞点对应的所述目标巡检杆塔的数量除以所述无人机数量,若相除结果为整数,将所述相除结果的数值确定为所述移动机巢的需求量;否则,将所述相除结果的整数部分加一后的数值确定为所述移动机巢的需求量。使确定的所述移动机巢的需求量和无人机的数量足以一次性对所述目标起飞点对应的所有所述目标巡检杆塔进行性巡检。
17.进一步,根据所述目标起飞点对应的目标巡检杆塔的数量,对所述目标起飞点进行排序,并显示排序后的所述目标起飞点以及所述目标起飞点对应的目标巡检杆塔的数量。有利于用户根据所述目标起飞点的排序情况进行巡检计划的安排。
18.进一步,所述根据各个所述候选起飞区与道路网的交集,获得多个第一候选起飞点集合后,还包括以下步骤:
19.获取所述第一候选起飞点集合中各个第一候选起飞点到所述目标巡检杆塔的线性路径;
20.检测所述线性路径上高度高于预设的第一高度值的阻碍物的交集,将与所述阻碍物存在交集的所述线性路径确定为第一受阻路径;将与所述第一受阻路径对应的第一候选起飞点确定为无效起飞点并从所述第一候选起飞点集合中删除所述无效起飞点。防止无人机在飞行过程中遇到无法跨越的障碍物而导致巡检失败。
21.进一步,所述根据各个所述候选起飞区与道路网的交集,获得多个第一候选起飞点集合后,还包括以下步骤:
22.获取所述第一候选起飞点集合中各个第一候选起飞点到所述目标巡检杆塔的线性路径;
23.检测所述线性路径上高度高于预设的第二高度值但低于所述第一高度值的阻碍物的交集,将与所述阻碍物存在交集的所述线性路径确定为第二受阻路径;其中,所述第二高度值低于所述第一高度值;
24.获取所述无人机在所述第二受阻路径上的往返路程;
25.将所述往返路程与所述可飞行距离比对,若所述往返路程大于所述可飞行距离,将与所述往返路程对应的所述受阻起飞点确定为无效起飞点并从所述第一候选起飞点集合中删除所述无效起飞点。防止无人机在完成在巡检后无法顺利返回。
26.进一步,若各个所述第一候选起飞点集合之间不存在交集,执行以下步骤:
27.获取所述第一候选起飞点集合中各个第一候选起飞点到所述目标巡检杆塔的直线距离;
28.根据所述直线距离由小到大对所述第一候选起飞点进行排序。有利于用户根据所
述第一候选起飞点到所述目标巡检杆塔的直线距离安排巡检计划。
29.进一步,所述根据所述无人机的最大飞行时长、平均飞行速度以及所述目标巡检杆的巡检耗时,得到所述无人机相对于各个所述目标巡检杆塔的剩余可飞行距离,包括以下步骤:
30.将所述无人机的最大飞行时长减去所述目标巡检杆塔的巡检耗时,获得所述无人机的剩余可飞行时长;
31.获取所述无人机的平均飞行速度与所述剩余可飞行时长的乘积,并确定为所述无人机的剩余可飞行距离。
32.进一步,根据所述无人机相对于各个所述目标巡检杆塔的剩余可飞行距离以及预设的剩余可飞行距离与候选起飞区的关系,确定各个所述目标巡检杆塔对应的候选起飞区,包括:
33.将以所述目标巡检杆塔所在的位置为圆心,以小于或等于对应的所述剩余可飞行距离的一半为半径确定的圆形区域,确定为候选起飞区。
34.本发明还提供一种计算机设备包括储存器、处理器以及储存在所述储存器中并可被所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的移动机巢候选起飞点获取方法的步骤。
35.为了能更清晰的理解本发明,以下将结合附图说明阐述本发明的具体实施方式。
附图说明
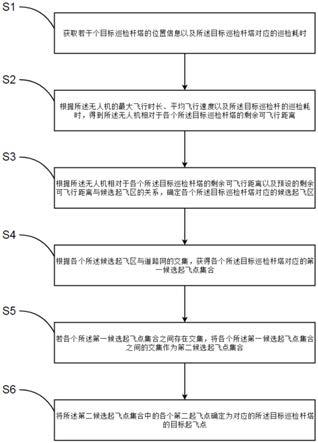
36.图1为本发明一个实施例的移动机巢候选起飞点获取方法的流程图。
37.图2为本发明一个实施例的移动机巢候选起飞点获取方法的步骤s21
‑
s22的流程图。
38.图3为本发明一个实施例的移动机巢候选起飞点获取方法的候选起飞区示意图。
39.图4为本发明一个实施例的移动机巢候选起飞点获取方法的步骤s71
‑
s72的流程图。
40.100、目标巡检杆塔;200、候选起飞区;300、道路网。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.请参阅图1,其是本发明一个实施例的移动机巢候选起飞点获取方法的流程图,包括以下步骤:
43.s1:获取若干个目标巡检杆塔的位置信息以及所述目标巡检杆塔对应的巡检耗时;
44.所述巡检耗时和所述目标巡检杆塔的设备种类和数量相关,可以根据所述目标巡检杆塔的设备种类和数量计算出所述巡检耗时,也可以将所述目标巡检杆塔的历史巡检记录中记录的耗时作为所述巡检耗时。
45.s2:根据所述无人机的最大飞行时长、平均飞行速度以及所述目标巡检杆的巡检耗时,得到所述无人机相对于各个所述目标巡检杆塔的剩余可飞行距离;
46.请参阅图2,其中,所述步骤s2包括以下步骤:
47.s21:将所述无人机的最大飞行时长减去所述目标巡检杆塔的巡检耗时,获得所述无人机的剩余可飞行时长:
48.tres=tairborne
‑
tpatrol;
49.其中,tres表示所述剩余可飞行时长,tairborne表示所述无人机的最大飞行时长,tpatrol表示所述目标巡检杆塔的巡检耗时;
50.s22:获取所述无人机的平均飞行速度与所述剩余可飞行时长的乘积,并确定为所述无人机的剩余可飞行距离:
51.diatance=vairborne
×
tres;
52.其中,diatance表示所述无人机的剩余可飞行距离,vairborne表示所述无人机的平均飞行速度。
53.s3:根据所述无人机相对于各个所述目标巡检杆塔的剩余可飞行距离以及预设的剩余可飞行距离与候选起飞区的关系,确定各个所述目标巡检杆塔对应的候选起飞区;
54.所述步骤s3包括以下步骤:将以所述目标巡检杆塔所在的位置为圆心,以小于或等于对应的所述剩余可飞行距离的一半为半径确定的圆形区域,确定为候选起飞区。由于整个过程中,所述移动机巢需要放置在某一地点,然后所述无人机才所述移动机巢飞行到所述目标巡检杆塔,然后在巡检完所述目标巡检杆塔后再原路返回到所述移动机巢,因此所述无人机的剩余可飞行距离要足以支撑所述无人机的往返路程,因此,以小于或等于对应的所述剩余可飞行距离的一半为半径以确定所述候选起飞区,可以获得所述无人机可以在所述移动机巢和所述目标巡检杆塔之间顺利往返的范围。并且由于不同的所述目标巡检杆塔的巡检时耗可能不相等,因此与所述目标巡检杆塔对应的所述候选起飞区的范围大小也可能不同。
55.s4:根据各个所述候选起飞区与道路网的交集,获得各个所述目标巡检杆塔对应的第一候选起飞点集合。
56.请参阅图3,结合考虑所述移动机巢的运输便利和放置要求,所述移动机巢应放置于道路上,因此通过所述步骤s4,可以得到多个位于所述道路网300上的第一候选起飞点集合,即所述第一候选起飞点集合中的所有第一候选起飞点都位于道路上。其中,位于同一个所述候选起飞区200的第一候选起飞点属于同一个所述第一候选起飞点集合,每个第一候选起飞点集合只对应一个所述目标巡检杆塔100。例如,图3中的点a、b和c都属于与2号杆塔对应的第一候选起飞点集合,点c和d都属于与4号杆塔对应的第一候选起飞点集合,点c、d和e都属于与1号杆塔对应的第一候选起飞点集合;点d和e都属于与3号杆塔对应的第一候选起飞点集合。
57.s5:若各个所述第一候选起飞点集合之间存在交集,将各个所述第一候选起飞点集合之间的交集作为第二候选起飞点集合;
58.由于所述第一候选起飞点集合之间可能存在交集,而位于所述第一候选起飞点集合之间的交集部分的位置上的所述移动机巢可以同时对应至少2个所述目标巡检杆塔100,例如所述第二候选起飞点位于2个所述第一候选起飞点集合之间的交集部分,表示所述第
二候选起飞点对应2个所述目标巡检杆塔100,如图3中的点e,点e对应的是2个所述目标巡检杆塔100是1好杆塔和3好杆塔,所述第二候选起飞点位于3个所述第一候选起飞点集合之间的交集部分,表示所述第二候选起飞点对应3个所述目标巡检杆塔100,如图3中的点d,点d对应的3个所述目标巡检杆塔100是1号杆塔、3号杆塔和4号杆塔,以此类推。因此通过所述步骤s5将所述第一候选起飞点集合之间的交集作为第二候选起飞点集合,可以让用户获得对应至少2个所述目标巡检杆塔100的第二候选起飞点。
59.s6:将所述第二候选起飞点集合中的各个第二起飞点确定为对应的所述目标巡检杆塔的目标起飞点。
60.相对于所述第一候选起飞点,可以确定所述第二候选起飞点对应的所述目标巡检杆塔的数量至少为2个,因此选取所述第二候选起飞点为对应的所述目标巡检杆塔的目标起飞点可以提高巡检效率,其具体体现为:当所述无人机数量小于所述目标起飞点对应的所述目标巡检杆塔的数量时,可以在所述目标起飞点连续控制所述无人机依次对尚未巡检的所述目标巡检杆塔进行巡检,无需每巡检一个所述目标巡检杆塔就换一个位置,节省了更换位置的时间,从而提高了巡检的效率;当所述无人机数量不小于所述目标起飞点对应的所述目标巡检杆塔的数量时,可以同时驱动所述无人机对所有所述目标起飞点对应的目标巡检杆塔进行巡检,更是大幅度地提高了巡检的效率。
61.相对于现有技术,本发明的移动机巢候选起飞点获取方法根据所述无人机的飞行参数和所述目标巡检杆的巡检耗时得到候选起飞去,然后通过各个所述候选起飞区与道路网的交集得到多个方便运输使用所述无人机的第一候选起飞点集合,再将各个所述第一候选起飞点集合之间的交集作为第二候选起飞点集合,以得到对应至少两个目标巡检杆塔的目标起飞点。实现了快速获得对应至少两个目标巡检杆塔的目标起飞点,使用户在一个目标起飞点使用多架无人机对多个目标巡检杆塔进行巡检,从而提高巡检效率的效果。
62.请参阅图4,在一个可行的实施例中,所述步骤s6后,还包括以下步骤:
63.s71:获取所述移动机巢搭载的无人机数量;
64.s72:根据所述目标起飞点对应的所述目标巡检杆塔的数量和所述移动机巢搭载的无人机数量,确定以所述目标起飞点作为所述移动机巢的起飞位置时,巡检所有目标巡检杆塔对应的所述移动机巢的需求量。
65.在本实施例中,可以让用户知道以所述目标起飞点作为所述移动机巢的起飞位置时需要的所述移动机巢的需求量,有利于用户安排足够的所述移动机巢以实现同时巡检所述目标起飞点对应的所有所述目标巡检塔,从而提高巡检效率。例如,当所述移动机巢搭载的无人机数量为2,而所述目标起飞点对应的所述目标巡检杆塔的数量为4时,所述目标起飞点的移动机巢需求量应为2。
66.在一个可行的实施例中,所述步骤s72包括以下步骤:
67.将所述目标起飞点对应的所述目标巡检杆塔的数量除以所述无人机数量,若相除结果为整数,将所述相除结果的数值确定为所述移动机巢的需求量;否则,将所述相除结果的整数部分加一后的数值确定为所述移动机巢的需求量。例如,当所述移动机巢搭载的无人机数量为2,而所述目标起飞点对应的所述目标巡检杆塔的数量为5时,将所述目标起飞点对应的所述目标巡检杆塔的数量除以所述无人机数量得到的结果是2.5,由于结果不为整数,因此将述相除结果的整数部分加一后的数值确定为所述移动机巢的数量,即目标起
飞点的移动机巢需求量应为3。使确定的所述移动机巢的需求量和无人机的数量足以一次性对所述目标起飞点对应的所有所述目标巡检杆塔进行性巡检。
68.在一个可行的实施例中,根据所述目标起飞点对应的目标巡检杆塔的数量,对所述目标起飞点进行排序,并显示排序后的所述目标起飞点以及所述目标起飞点对应的目标巡检杆塔的数量。有利于用户根据所述目标起飞点的排序情况进行巡检计划的安排。
69.在一个可行的实施例中,所述根据各个所述候选起飞区与道路网的交集,获得多个第一候选起飞点集合后,还包括以下步骤:
70.获取所述第一候选起飞点集合中各个第一候选起飞点到所述目标巡检杆塔的线性路径;
71.检测所述线性路径上高度高于预设的第一高度值的阻碍物的交集,将与所述阻碍物存在交集的所述线性路径确定为第一受阻路径;将与所述第一受阻路径对应的第一候选起飞点确定为无效起飞点并从所述第一候选起飞点集合中删除所述无效起飞点。
72.在本实施例中,所述第一高度值为所述无人机最大可飞行高度,当所述障碍物的高度超过所述无人机最大可飞行高度时,表示所述无人机在对应的所述第一受阻路径上无法跨越所述障碍物,即所述无人机无法经由所述第一受阻路径顺利地往返于所述移动机巢和所述目标巡检杆塔之间,而本实施例通过删除与所述第一受阻路径对应的第一候选起飞点,可以防止无人机在飞行过程中遇到无法跨越的障碍物而导致巡检失败。
73.在一个可行的实施例中,所述根据各个所述候选起飞区与道路网的交集,获得多个第一候选起飞点集合后,还包括以下步骤:
74.获取所述第一候选起飞点集合中各个第一候选起飞点到所述目标巡检杆塔的线性路径;
75.检测所述线性路径上高度高于预设的第二高度值但低于所述第一高度值的阻碍物的交集,将与所述阻碍物存在交集的所述线性路径确定为第二受阻路径;其中,所述第二高度值低于所述第一高度值;
76.获取所述无人机在所述第二受阻路径上的往返路程;
77.将所述往返路程与所述可飞行距离比对,若所述往返路程大于所述可飞行距离,将与所述往返路程对应的所述受阻起飞点确定为无效起飞点并从所述第一候选起飞点集合中删除所述无效起飞点。
78.在本实施例中,所述第二高度值可以是小于所述无人机的最大飞行高度且大于0的任意值,可选地,所述第二高度值是所述无人机的最大飞行高度一半数值,当所述阻碍物的高度值大于所述第二高度值时,表示所述无人机在所述第二受阻路径上移动时可能会受到所述障碍物的影响而无法顺利返回到所述移动机巢,因此需要结合所述第二受阻路径的水平方向上往返长度和跨越所述障碍物耗费的额外路程,从而得到所述无人机在所述第二受阻路径上的往返路程,然后将所述往返路程大于所述可飞行距离的所述第一候选起飞点确定为无效起飞点并删除,从而防止无人机在完成在巡检后无法顺利返回。
79.在一个可行的实施例中,若各个所述第一候选起飞点集合之间不存在交集,执行以下步骤:
80.获取所述第一候选起飞点集合中各个第一候选起飞点到所述目标巡检杆塔的直线距离;
81.根据所述直线距离由小到大对所述第一候选起飞点进行排序。
82.在本实施例中,当各个所述第一候选起飞点集合之间不存在交集,此时为了提高巡检效率并且降低所述无人机在巡检过程中出现意外的几率,根据所述直线距离由小到大对所述第一候选起飞点进行排序,以便于用户根据所述第一候选起飞点到所述目标巡检杆塔的直线距离安排巡检计划,用户可以优先选择所述直线距离小的所述第一候选起飞点作为目标起飞点,因此所述直线距离越小,所述无人机飞行的路程越短,飞行时间也越短,因此所述无人机在飞行过程中遭遇意外的可能性也越小。
83.本发明还提供一种计算机设备包括储存器、处理器以及储存在所述储存器中并可被所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的移动机巢候选起飞点获取方法的步骤。
84.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1