一种面向数字孪生仿真的无人机集群传感器模型校正方法
1.本发明属于系统建模与仿真领域,特别涉及一种面向数字孪生仿真的无人机集群传感器模型虚实结合校正方法。
背景技术:
2.随着电子机械系统、传感器和通信技术的快速发展,无人机(unmanned aerial vehicle, uav)系统因其通用、灵活、易安装和低成本,为军事和民用应用提供了新的途径,如目标搜索和摧毁、边境监视、野火管理、灾害监测和遥感监测。无人机集群是由大量小型无人机组成的群体化、智能化和功能分布化的高抗毁飞行体系,在数量规模、协同效能、敌我对抗交换成本等方面具有巨大的优势,成为了军事科技领域研究的热点。
3.无人机集群作战效能很大程度上取决于高效的网络架构和集群智能协同控制水平。面对日益复杂的战场电磁环境,空域、时域、频域上种类繁杂、密集重叠、动态多变、功率分布参差不齐的电磁信号对集群协同能力和电磁作战效能的发挥以及战场生存等造成了重要影响和制约作用。如何有效验证无人机集群的组网性能和协同控制能力,提供真实可靠的验证结果,是研究智能化战术战法、规划新型作战力量编制体制、把握未来战争演进趋势的重要手段。
4.对于无人机集群的组网和协同性能测试,常用的测试方法为测试床试验、数值模拟和半实物仿真。测试床试验通过研制与实际系统相似的实体模型,对其性能测试以评估原系统工作性能,测试结果真实可信,但测试过程风险大,成本高,场景难以再现。数值模拟通过严格的数学模型,利用数值计算软件进行计算分析,测试时间少,测试成本小,利于进行变量控制试验,但难以对非线性行为和不确定因素进行准确建模。半实物仿真在计算机实现仿真模型的基础上,通过加载实际的设备,实现仿真模型与实际设备联合仿真,仿真系统的部分是实际系统的组成部分,其他部分则采用计算机模拟的仿真模型。
5.近年来,数字孪生(digitaltwin)备受学术界和企业界关注,尤其是数字孪生的落地应用更是关注热点。数字孪生以数字化方式创建物理实体的虚拟模型,借助数据模拟物理实体在现实环境中的行为,通过虚实交互反馈、数据融合分析、决策迭代优化等手段,为物理实体增加或扩展新的能力。数字孪生充分利用模型、数据、智能并集成多学科的技术,发挥连接物理世界和信息世界的桥梁和纽带作用,提供更加实时、高效、智能的服务。
6.数字孪生仿真系统实现了真实物理试验与虚拟仿真试验之间的互利共生和深度结合,真实物理试验可以对虚拟仿真试验的预测分析和评估功能进行利用,而虚拟仿真试验利用真实物理试验的数据来提高自身准确性和可信度,同时为真实物理试验提供试验设计、状态预测、结果分析、效能评估、过程控制、和辅助决策等功能支持。数字孪生落地应用的首要任务是创建应用对象的数字孪生模型。无人机通常搭载多种传感器,如三轴加速度计、三轴陀螺仪、三轴磁力计、全球定位系统(globalpositioningsystem, gps)、气压计,利用这些传感器,无人机可以感知自身的位置和姿态,是进一步完成分布式组网与协同任务的前提。因此,如何利用真实无人机传感器的测量数据,构建精确和可信的传感器数字孪生
模型,是构建无人机集群数字孪生仿真系统的重要基础。
技术实现要素:
7.本发明的目的是针对无人机集群数字孪生仿真系统,提出一种虚实结合的传感器模型校正方法。为了实现该目的,本发明公开了一种面向数字孪生仿真的无人机集群传感器模型校正方法,所采用的步骤是:步骤1:建立面向数字孪生仿真的无人机集群传感器虚实结合校正模型;该模型包含真实无人机传感器、传感器数字孪生仿真模型、数字孪生数据库、无人机集群任务四个模块及其连接;地面站通过无线链路向集群无人机发布任务指令和航点信息,无人机传感器实时采集自身的位置和姿态测量数据,并通过无线链路回传至地面站;地面站通过数据报套接字将测量数据发给仿真引擎,并存储在仿真引擎负责维护的数字孪生数据库,得到测量空间z;仿真引擎运行传感器数字孪生仿真模型和虚实结合校正模型,运行仿真模型得到传感器状态空间x并存储在数字孪生数据库,然后将测量空间中的测量数据和状态空间中的状态数据输入虚实结合校正模型;在该模型中:(1)、所有无人机的同类传感器数字孪生模型在k时刻状态的状态集为x
s,k
={x
s
(1), x
s
(2),
ꢀ…
, x
s
(n
k
)},其中s代表单架无人机传感器系统中的第s个传感器,n
k
为无人机数量,x
s
(n
k
)表示第n
k
架无人机、第s个传感器在k时刻的状态矢量,n
k
和x
s
(n
k
)均为随机变量;不失一般性,针对无人机集群中同一类型传感器进行建模,将传感器s的状态集x
s,k
简记为x
k
={x(1), x(2),
ꢀ…
, x(n
k
)}={x(i) | i =1, 2,
…
, n
k
},状态空间x ={x
k | k = 1, 2,
…
};(2)、每个测量数据最多由一架无人机生成,每架无人机的传感器要么生成一个测量数据,要么不产生测量数据;考虑虚警过程,即杂波过程,与无人机传感器生成测量数据过程独立,并且所有测量数据都条件独立于无人机的状态;k时刻传感器测量数据的测量集为z
k
={z(0), z(1),
ꢀ…
, z(m
k
)}={z(j) | j = 0, 1, 2,
…
, m
k
},m
k
为测量数据集合在k时刻的元素个数,m
k
=0时表示空观测,m
k
和z(m
k
)均为随机变量,测量空间z={z
k
|k=1,2,
…
};步骤2:建立无人机集群传感器数字孪生测量模型,考虑检测概率为p
d
(x(i),θ)的伯努利测量模型和独立同分布的泊松杂波模型c
k
,求解传感器在k时刻的似然函数g
k
(z
k
|x
k
, θ),其中θ为数字孪生仿真传感器模型的参数矢量θ,x
k
为状态集,z
k
为测量集,x(i)是x
k
中第i个元素;步骤3:建立无人机集群数字孪生仿真模型,考虑集群中无人机的动态加入、离开、衍生和被击毁,求解传感器在k时刻的马尔科夫状态转移密度函数f
k|k
‑1(x
k
|x
k
‑1,θ);步骤4:基于贝叶斯估计方法,通过传感器测量集和状态集,并结合测量模型和数字孪生仿真模型,求解状态集依条件于测量集的预测和校正的后验概率密度函数,然后求解参数矢量的后验概率密度函数,并通过最大后验估计方法计算参数矢量θ的校正值。
8.进一步,建立基于随机有限集的传感器测量模型,求解传感器的似然函数的具体方法为:(1)、一个传感器测量模型对应一个似然函数g
k
(z(j)|x(i),θ),该传感器对无人
机的位置和姿态状态进行观测,不同无人机的传感器将测量数据将经过地面站转发汇总到数字孪生数据库;θ表示参数矢量,包含传感器偏差和噪声的参数;(2)、对于单架无人机的状态x(i),传感器的检测概率为p
d
(x(i),θ),生成一个测量数据;漏检概率为1
‑
p
d
(x(i),θ),即不产生测量数据;(3)、杂波过程c
k
在时间上服从期望值为λ
c
的泊松分布,其空间分布服从概率密度函数c(z(j),θ);时间和空间分布表示在一段时间内、一定区域内杂波数量的分布情况;考虑传感器测量过程中的漏检和杂波,则传感器的随机观测数据集合z
k
表示为(1)其中,t
k
(x
k
)为状态x
k
生成的测量数据,t
k
(x(i))为状态x(i)对应的无人机传感器生成的测量数据集;假设一个无人机实体或者生成一个测量数据,或者没有生成测量数据,t
k
(x(i))具有如下形式
ꢀꢀ
(2)其中,集合a∈z,z(x(i))为与x(i)有关的传感器测量模型的输出状态;传感器测量过程的不确定性p
b
(a=g),a、g∈z,用伯努利测量模型描述为(3)假设杂波过程c
k
为{c1,
…
,c
m
},m=|c
k
|为随机非负整数,若c
k
为泊松过程,则m的概率分布为(4)对于状态集合x
k
,它生成测量数据集合z
k
的概率密度函数通过似然函数g
k
(z
k
|x
k
, θ)描述;综合考虑传感器输出、杂波和噪声的影响,似然函数g
k
(z
k
|x
k
, θ)计算为
ꢀꢀꢀꢀꢀꢀ
(5)其中φ(i)是状态集x
k
元素下标{1, 2,
…
, n
k
}到测量集z
k
元素下标{0, 1, 2,
…
, m
k
}的关联函数,φ={φ(i)}表示所有关联函数的集合。
9.进一步,建立基于随机有限集的无人机集群数字孪生仿真模型,求解传感器的马尔科夫状态转移密度函数的具体方法为:在无人机集群执行任务过程中,无人机动态加入和离开,以及受到火力打击而被击毁,使得无人机的数目在不断变化;无人机实体的动态演化可以通过基于随机有限集的
无人机集群数字孪生仿真模型来描述:(1)、单个传感器的数字孪生仿真模型采用加性模型:x
k
=h(x
k
‑1)+u
k
‑1+v
k
‑1,u
k
‑1和v
k
‑1分别表示k
‑
1时刻传感器偏差和噪声,对应的马尔科夫状态转移密度函数为f
k|k
‑1(x(n
k
)|x(n
k
‑1),θ),表示k
‑
1时刻状态为x(n
k
‑1)的传感器在k时刻状态为x(n
k
)的可能性;θ表示参数矢量,包含传感器偏差和噪声的参数;(2)、k
‑
1时刻状态为x(n
k
‑1)的传感器所在无人机存活至k时刻的概率简记为p
s
(x(n
k
),θ);(3)、k
‑
1时刻状态为x(n
k
‑1)的传感器所在无人机在k时刻衍生出新的无人机的概率为y
k|k
‑1(y
k|k
‑1(x
k
‑1)|x(n
k
‑1),θ),其中y
k|k
‑1(x
k
‑1)为衍生无人机传感器的状态集合;k时刻的新生无人机对应传感器的状态集合等于y
k
的概率密度函数为y
k
(y
k
,θ);(4)、k时刻无人机实体持续存在的状态集合为s
k|k
‑1(x
k
‑1),其中x
k
‑1={x
′
(1),x
′
(2),
…
,x
′
(n
k
‑1)};无人机集群传感器数字孪生仿真模型的马尔科夫状态转移密度函数f
k|k
‑1(x
k
|x
k
‑1,θ)可以表示为(6)式(6)中
ꢀꢀꢀꢀꢀꢀꢀ
(7)其中,u0(θ)是初始时刻无人机的期望数目,y0(x(i),θ)是其状态分布,u(x
′
(i),θ)是由状态x
′
(i)衍生出的新无人机的期望数目,y(x(i)|x
′
(i),θ)是其状态分布;是k
‑
1时刻状态矢量x
′
(i)的元素下标{1, 2,
…
, n
k
‑1}到k时刻状态矢量x(i)的元素下标{1, 2,
…
, n
k
}的关联函数,表示所有关联函数的集合。
10.进一步,求解参数矢量的后验概率密度函数,并计算参数矢量的校正值的具体方法为:令z
1:k
={z1,
…
,z
k
}表示传感器测量数据的时间序列,用l
k|k
(x
k
|z
1:k
,θ)表示无人机集群在k时刻状态的后验概率密度函数;假设k
‑
1时刻的后验概率密度函数l
k
‑
1|k
‑1(x
k
‑1|z
1:k
‑1,θ)已知,并得到k时刻累积的测量数据z
1:k
,则根据贝叶斯估计方法,得到预测和校正
的后验概率密度函数分别为
ꢀꢀꢀꢀ
(8)(9)面向数字孪生仿真的无人机集群传感器校正的目的是得到后验概率密度函数p(θ|z
1:k
),在拥有先验信息p0(θ)的前提下,应用贝叶斯推理方法得到
ꢀꢀꢀꢀꢀ
(10)其中概率密度函数p(z
1:k
|θ)计算为
ꢀꢀꢀꢀꢀꢀ
(11)最后,使用后验概率密度函数p(θ|z
1:k
)的均值,并通过最大后验估计方法计算参数矢量θ的校正值为
ꢀꢀꢀ
(12)。
附图说明
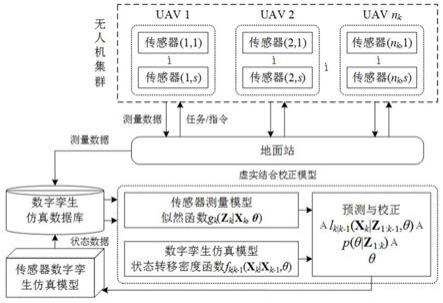
11.图1是本发明的面向数字孪生仿真的无人机集群传感器校正模型;图2是本发明的无人机集群传感器数字孪生测量模型;图3是本发明的无人机集群数字孪生仿真模型。
具体实施方式
12.下面结合附图和实施例对本发明作进一步详细描述。
13.本发明提出了一种面向数字孪生仿真的无人机集群传感器模型校正方法,具体实施步骤为:步骤1:建立面向数字孪生仿真的无人机集群传感器虚实结合校正模型。
14.如附图1所示,该模型包含真实无人机传感器、传感器数字孪生仿真模型、数字孪生数据库、无人机集群任务四个模块及其连接;地面站通过无线链路向集群无人机发布任务指令和航点信息,无人机传感器实时采集自身的位置和姿态测量数据,并通过无线链路回传至地面站;地面站通过数据报套接字将测量数据发给仿真引擎,并存储在仿真引擎负责维护的数字孪生数据库,得到测量空间z;仿真引擎运行传感器数字孪生仿真模型和虚实结合校正模型,运行仿真模型得到传感器状态空间x并存储在数字孪生数据库,然后将测量
空间中的测量数据和状态空间中的状态数据输入虚实结合校正模型。
15.在该模型中:(1)所有无人机的同类传感器数字孪生模型在k时刻状态的状态集为x
s,k
={x
s
(1), x
s
(2),
ꢀ…
, x
s
(n
k
)},其中s代表单架无人机传感器系统中的第s个传感器,n
k
为无人机数量,x
s
(n
k
)表示第n
k
架无人机、第s个传感器在k时刻的状态矢量,n
k
和x
s
(n
k
)均为随机变量。状态x
s
(n
k
)的具体含义根据传感器s而定,表1列举了旋翼无人机基本的位置和姿态传感器,其中x、y、z表示三维坐标轴,每架无人机根据自身位置和姿态传感器的输出,通过飞控算法解算出无人机最终的飞行位置和姿态。
16.表1 旋翼无人机位置和姿态传感器输出状态不失一般性,针对无人机集群中同一类型传感器进行建模,将传感器s的状态集x
s,k
简记为x
k
={x(1), x(2),
ꢀ…
, x(n
k
)}={x(i) | i =1, 2,
…
, n
k
},状态空间x ={x
k | k = 1, 2,
…
}。
17.(2)每个测量数据最多由一架无人机生成,每架无人机的传感器要么生成一个测量数据,要么不产生测量数据。考虑虚警过程,即杂波过程,与无人机传感器生成测量数据过程独立,并且所有测量数据都条件独立于无人机的状态。k时刻传感器测量数据的测量集为z
k
={z(0), z(1),
ꢀ…
, z(m
k
)}={z(j) | j = 0, 1, 2,
…
, m
k
},m
k
为测量数据集合在k时刻的元素个数,m
k
=0时表示空观测,m
k
和z(m
k
)均为随机变量,测量空间z={z
k
|k=1,2,
…
}。
18.步骤2:建立无人机集群传感器数字孪生测量模型,考虑检测概率为p
d
(x(i),θ)的伯努利测量模型和独立同分布的泊松杂波模型c
k
,求解传感器在k时刻的似然函数g
k
(z
k
|x
k
, θ),其中θ为数字孪生仿真传感器模型的参数矢量θ,x
k
为状态集,z
k
为测量集,x(i)是x
k
中第i个元素。
19.(1)一个传感器测量模型对应一个似然函数g
k
(z(j)|x(i),θ),该传感器对无人机的位置和姿态状态进行观测,不同无人机的传感器将测量数据将经过地面站转发汇总到数字孪生数据库。θ表示参数矢量,包含传感器偏差和噪声的参数。
20.(2)对于单架无人机的状态x(i),传感器的检测概率为p
d
(x(i),θ),生成一个测量数据;漏检概率为1
‑
p
d
(x(i),θ),即不产生测量数据。
21.(3)杂波过程c
k
在时间上服从期望值为λ
c
的泊松分布,其空间分布服从概率密度函数c(z(j),θ)。时间和空间分布表示在一段时间内、一定区域内杂波数量的分布情况。
22.考虑传感器测量过程中的漏检、虚警或杂波,建立如附图2所示的无人机集群传感器数字孪生测量模型。该模型集成了传感器的噪声模型,而且还可以描述传感器的检测概率、杂波和数据传输噪声,则传感器的随机观测数据集合z
k
表示为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)其中,t
k
(x
k
)为状态x
k
生成的测量数据,t
k
(x(i))为状态x(i)对应的无人机传感器生成的测量数据集。
23.假设一个无人机实体或者生成一个测量数据,或者没有生成测量数据,t
k
(x(i))具有如下形式
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)其中,集合a∈z,z(x(i))为与x(i)有关的传感器测量模型的输出状态。
24.传感器测量过程的不确定性p
b
(a=g),a、g∈z,用伯努利测量模型描述为
ꢀꢀꢀꢀꢀꢀ
(3)假设杂波过程c
k
为{c1,
…
,c
m
},m=|c
k
|为随机非负整数,若c
k
为泊松过程,则m的概率分布为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)对于状态集合x
k
,它生成测量数据集合z
k
的概率密度函数通过似然函数g
k
(z
k
|x
k
, θ)描述。综合考虑传感器输出、杂波和噪声的影响,似然函数g
k
(z
k
|x
k
, θ)计算为
ꢀꢀꢀꢀꢀꢀꢀꢀ
(5)其中φ(i)是状态集x
k
元素下标{1, 2,
…
, n
k
}到测量集z
k
元素下标{0,1, 2,
…
, m
k
}的关联函数,φ={φ(i)}表示所有关联函数的集合。
25.步骤3:建立无人机集群数字孪生仿真模型,考虑集群中无人机的动态加入、离开、衍生和被击毁,求解传感器在k时刻的马尔科夫状态转移密度函数f
k|k
‑1(x
k
|x
k
‑1,θ)。
26.在无人机集群执行任务过程中,无人机动态加入和离开,以及受到火力打击而被击毁,使得无人机的数目在不断变化。如附图3所示,无人机实体的动态演化可以通过无人机集群数字孪生仿真模型来描述。
27.(1)单个传感器的数字孪生仿真模型采用加性模型:x
k
=h(x
k
‑1)+u
k
‑1+v
k
‑1,u
k
‑1和v
k
‑1分别表示k
‑
1时刻传感器偏差和噪声,对应的马尔科夫状态转移密度函数为f
k|k
‑1(x(n
k
)|x(n
k
‑1),θ),表示k
‑
1时刻状态为x(n
k
‑1)的传感器在k时刻状态为x(n
k
)的可能性。θ表示参数矢量,包含传感器偏差和噪声的参数。
28.(2)k
‑
1时刻状态为x(n
k
‑1)的传感器所在无人机存活至k时刻的概率简记为p
s
(x(n
k
),θ)。
29.(3)k
‑
1时刻状态为x(n
k
‑1)的传感器所在无人机在k时刻衍生出新的无人机的概率为y
k|k
‑1(y
k|k
‑1(x
k
‑1)|x(n
k
‑1),θ),其中y
k|k
‑1(x
k
‑1)为衍生无人机传感器的状态集合。k时刻的新生无人机对应传感器的状态集合等于y
k
的概率密度函数为y
k
(y
k
,θ)。
30.(4)k时刻无人机实体持续存在的状态集合为s
k|k
‑1(x
k
‑1),其中x
k
‑1={x
′
(1),x
′
(2),
…
,x
′
(n
k
‑1)}。
31.无人机集群传感器数字孪生仿真模型的马尔科夫状态转移密度函数f
k|k
‑1(x
k
|x
k
‑1,θ)可以表示为
ꢀꢀꢀ
(6)式(6)中
ꢀꢀꢀꢀꢀꢀꢀ
(7)其中,u0(θ)是初始时刻无人机的期望数目,y0(x(i),θ)是其状态分布,u(x
′
(i),θ)是由状态x
′
(i)衍生出的新无人机的期望数目,y(x(i)|x
′
(i),θ)是其状态分布。是k
‑
1时刻状态矢量x
′
(i)的元素下标{1, 2,
…
, n
k
‑1}到k时刻状态矢量x(i)的元素下标{1, 2,
…
, n
k
}的关联函数,表示所有关联函数的集合。
32.步骤4:基于贝叶斯估计方法,通过传感器测量集和状态集,并结合测量模型和数字孪生仿真模型,求解状态集依条件于测量集的预测和校正的后验概率密度函数l
k|k
‑1(x
k
|z
1:k
‑1,θ)和l
k|k
(x
k
|z
1:k
,θ),然后求解参数矢量的后验概率密度函数p(θ|z
1:k
),并通过最大后验估计方法计算参数矢量θ的校正值。
33.令z
1:k
={z1,
…
,z
k
}表示传感器测量数据的时间序列,用l
k|k
(x
k
|z
1:k
,θ)表示无人机集群在k时刻状态的后验概率密度函数。假设k
‑
1时刻的后验概率密度函数l
k
‑
1|k
‑1(x
k
‑1|z
1:k
‑1,θ)已知,并得到k时刻累积的测量数据z
1:k
,则根据贝叶斯估计方法,并结合步骤2和步骤3得到的传感器测量模型和无人机数字孪生仿真模型,得到预测和校正的后验概率密度函数分别为
ꢀꢀꢀ
(8)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(9)面向数字孪生仿真的无人机集群传感器校正的目的是得到后验概率密度函数p(θ|z
1:k
),在拥有先验信息p0(θ)的前提下,应用贝叶斯推理方法得到
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)其中概率密度函数p(z
1:k
|θ)计算为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)最后,使用后验概率密度函数p(θ|z
1:k
)的均值,并通过最大后验估计方法计算参数矢量θ的校正值为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)本发明中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1