一种对集群无人机的网式捕捉系统及方法与流程
1.本发明涉及随行防御技术领域,更为具体的,涉及一种对集群无人机的网式捕捉系统及方法。
背景技术:
2.由于微小型无人机成本低,隐蔽性好,可以利用无人机群携带各种类型的设备、武器弹药等对敌实施侦察跟踪、电子干扰、饱和攻击,或者作为诱饵吸引敌方的防空火力,诱骗敌方的防空系统,因此无人机群作战可以较小的代价突破敌方的防空网,使其成为继精确制导弹药后的又一重要攻击手段,必将引领新的作战模式。
3.目前,高价值的机动性武器平台、军事目标等,由于其装备特征明显、编队目标大,处在对空暴露状态,并且缺少必要的防护措施,容易遭受精确制导武器、常规弹药、无人机等的攻击,所以其战场生存能力差,因此伴随防御技术以及武器装备已经成为研究热点。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种对集群无人机的网式捕捉系统及方法,以实现对无人机群的反制,适用于对重要机动目标的伴随防护;机动性强,可以实现对无人机群的网式抓捕,从而保护重要的机动性武器平台、军事目标等;可以有效减少弹药消耗,实现大面积大范围捕获,同时还可以完成对捕捉到的无人机群的回收。
5.本发明的目的是通过以下方案实现的:
6.一种对集群无人机的网式捕捉系统,包括指挥控制车,在所述指挥控制车上安装有导弹发射模块,用于装载导弹和抓捕网,并用于对无人机群进行探测跟踪和对导弹的发射制导进行控制;所述导弹发射模块包括导弹发射箱,在导弹发射箱内安装有捕捉网包,在捕捉网包内设置有捕捉网,发射箱内放置有多枚导弹,导弹内部安装有导航定位装置和编队控制器,导弹与导弹之间信息交互以及互定位,每枚导弹上均系有牵引绳,通过牵引绳与捕捉网连接,在导弹发射箱设置有导弹用的发射孔和捕捉网弹出用的孔洞。
7.进一步地,所述捕捉网用孔洞包括中间孔,所述中间孔设置在导弹发射箱的中间位置。
8.进一步地,所述多枚导弹的数量为四个。四枚导弹采用主弹-从弹编队飞行模式,其内部装有导航定位装置以及编队控制器,弹与弹之间可以实现信息交互以及互定位,该方式具有较好的鲁棒性。在初始飞行阶段,四枚导弹牵引抓捕网采用密集编队构型飞行;当抵近无人机群时,四枚导弹朝不同方向飞行,使得抓捕网在空中大面积张开,实现对无人机群的抓捕。
9.进一步地,所述导弹发射箱为四联装导弹发射箱。
10.进一步地,所述发射孔的数量为四个,四枚导弹分别安装在导弹发射箱的四个发射孔内。
11.一种基于如上任一所述对集群无人机的网式捕捉系统的方法,包括步骤:
12.s1,指挥控制车探测识别到无人机群后进入跟踪瞄准状态,并发出指令给导弹发射模块,多枚导弹同时发射,拖拽出捕捉网包,导弹与捕捉网包之间通过牵引绳连接,由于此时捕捉网尚未展开,多枚导弹采用密集编队构型飞行;
13.s2,当接近无人机群时,在编队控制器的作用下,多枚导弹分别朝不同的方向飞行,使得捕捉网包内的捕捉网受力弹出,当捕捉网完全展开后,多枚导弹恢复成初始的编队构型;
14.s3,捕捉网碰触到无人机群后,多枚导弹拖拽牵引绳向中心靠拢,使得捕捉网收拢,从而实现对无人机的捕获,随后多枚导弹在制导指令的控制下飞向操纵人员指定的位置,完成对无人机的回收。
15.本发明的有益效果包括:
16.1)本发明实施例可以实现对无人机群的反制,适用于对重要机动目标的伴随防护;
17.2)本发明实施例采用车载平台搭载导弹发射模块,机动性强,可以实现对无人机群的网式抓捕,从而保护重要的机动性武器平台、军事目标等;
18.3)与传统反无人机方式相比,可以有效减少弹药消耗,实现大面积大范围捕获,同时还可以完成对捕捉到的无人机群的回收。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
20.图1为导弹模型,在其尾部连接有牵引绳
21.图2为导弹发射箱,四枚导弹及捕捉网安装于发射孔内
22.图3为导弹牵引捕捉网包的初始编队飞行状态
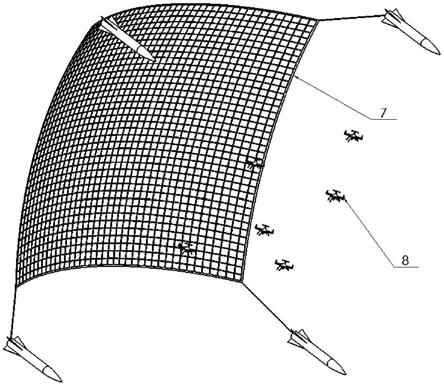
23.图4为导弹飞抵无人机群附近展开捕捉网实施抓捕
24.图中,1-导弹,2-牵引绳,3-导弹发射模块,4-发射孔,5-中间孔,6-捕捉网包,7-捕捉网,8-无人机群。
具体实施方式
25.本说明书中所有实施例公开的所有特征,或隐含公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合和/或扩展、替换。
26.如图1~图4所示,一种对集群无人机的网式捕捉系统,包括指挥控制车,在所述指挥控制车上安装有导弹发射模块3,用于装载导弹和抓捕网,并用于对无人机群8进行探测跟踪和对导弹的发射制导进行控制;所述导弹发射模块3包括导弹发射箱,在导弹发射箱内安装有捕捉网包6,在捕捉网包6内设置有捕捉网7,发射箱内放置有多枚导弹1,导弹1内部安装有导航定位装置和编队控制器,导弹1与导弹1之间信息交互以及互定位;每枚导弹上均系有牵引绳2,通过牵引绳2与捕捉网7连接,在导弹发射箱设置有导弹用的发射孔4和捕捉网7弹出用的孔洞。
27.在可选的实施方式中,捕捉网用孔洞包括中间孔5,所述中间孔5设置在导弹发射箱的中间位置。
28.在可选的实施方式中,多枚导弹1的数量为四个。
29.在可选的实施方式中,导弹发射箱为四联装导弹发射箱。
30.在可选的实施方式中,发射孔4的数量为四个,四枚导弹1分别安装在导弹发射箱的四个发射孔内。
31.在可选的实施方式中,一种基于如上任一所述对集群无人机的网式捕捉系统的方法,包括步骤:
32.s1,指挥控制车探测识别到无人机群后进入跟踪瞄准状态,并发出指令给导弹发射模块3,多枚导弹1同时发射,拖拽出捕捉网包6,导弹1与捕捉网包6之间通过牵引绳2连接,由于此时捕捉网尚未展开,多枚导弹采用密集编队构型飞行;
33.s2,当接近无人机群8时,在编队控制器的作用下,多枚导弹1分别朝不同的方向飞行,使得捕捉网包6内的捕捉网7受力弹出,当捕捉网7完全展开后,多枚导弹1恢复成初始的编队构型;
34.s3,捕捉网7碰触到无人机群8后,多枚导弹1拖拽牵引绳2向中心靠拢,使得捕捉网7收拢,从而实现对无人机的捕获,随后多枚导弹1在制导指令的控制下飞向操纵人员指定的位置,完成对无人机的回收。
35.在可选的实施方式中,如图1~图4所示,本发明实施例提供一种对集群无人机的网式捕捉系统,用于反制无人机群,可应用于随性防御以及固定目标区域防卫。该网式捕捉系统包括指挥控制车和导弹发射模块,其中导弹发射模块如图2所示,四枚导弹安装于发射孔内4,捕捉网安装于发射箱的中间孔洞内5。
36.本发明实施例的具体实施方式是:首先,指挥控制车探测识别到无人机群后进入跟踪瞄准状态,并发出指令给导弹发射模块3。四枚导弹1同时发射,拖拽出捕捉网包6,导弹与网包之间通过牵引绳2连接,由于此时捕捉网尚未展开,所以四枚导弹采用密集编队构型飞行,如图3所示。当接近无人机群8时,在编队控制器的作用下,四枚导弹分别朝不同的方向飞行,使得网包内的捕捉网7受力弹出,当捕捉网7完全展开后,四枚导弹恢复成初始的编队构型,如图4所示。捕捉网碰触到无人机群后,四枚导弹拖拽牵引绳向中心靠拢,使得捕捉网收拢,从而实现对无人机的捕获,随后导弹在制导指令的控制下可以飞向操纵人员指定的位置,完成对无人机的回收。
37.本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
38.上述技术方案只是本发明的一种实施方式,对于本领域内的技术人员而言,在本发明公开了应用方法和原理的基础上,很容易做出各种类型的改进或变形,而不仅限于本发明上述具体实施方式所描述的方法,因此前面描述的方式只是优选的,而并不具有限制性的意义。
39.除以上实例以外,本领域技术人员根据上述公开内容获得启示或利用相关领域的知识或技术进行改动获得其他实施例,各个实施例的特征可以互换或替换,本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1