一种大型飞机垂直速度自动控制方法与流程
1.本技术属于飞机自动飞行控制技术领域,特别涉及一种大型飞机垂直速度自动控制方法。
背景技术:
2.大型飞机在空中飞行或者进近时经常要求高精度的爬升率或者下降率进行飞行。这种情况就要求飞机能够按照目标垂直速度进行爬升或者下降。而且飞机在进行滚转机动的时候,垂直速度会发生改变。这对于高精度的爬升率或者下降率的需求产生了挑战。所以要求垂直速度模态的算法既要兼顾正常情况下的高精度的高度变化率,又要兼顾飞机在做滚转机动情况下的高度变化率能够稳定。
3.现有技术中没有考虑滚转机动的影响,会存在垂直速度产生偏差,超出指标要求。
4.因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现要素:
5.本技术的目的是提供了一种大型飞机垂直速度自动控制方法,以解决现有技术存在的至少一个问题。
6.本技术的技术方案是:
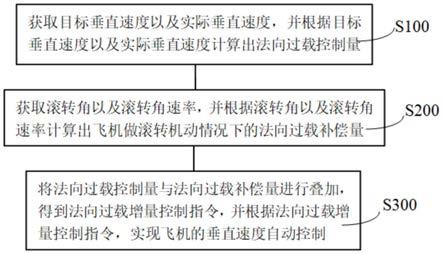
7.一种大型飞机垂直速度自动控制方法,包括:
8.步骤一、获取目标垂直速度以及实际垂直速度,并根据所述目标垂直速度以及所述实际垂直速度计算出法向过载控制量;
9.步骤二、获取滚转角以及滚转角速率,并根据所述滚转角以及所述滚转角速率计算出飞机做滚转机动情况下的法向过载补偿量;
10.步骤三、将所述法向过载控制量与所述法向过载补偿量进行叠加,得到法向过载增量控制指令,并根据所述法向过载增量控制指令,实现飞机的垂直速度自动控制。
11.在本技术的至少一个实施例中,步骤一中,所述获取目标垂直速度以及实际垂直速度,并根据所述目标垂直速度以及所述实际垂直速度计算出法向过载控制量包括:
12.获取目标垂直速度d_vz,所述目标垂直速度d_vz经过目标垂直速度速率限幅器后得到目标垂直速度指令d_vz_c:
[0013][0014]
获取实际垂直速度vz,计算出所述目标垂直速度指令d_vz_c与所述实际垂直速度vz的差值,得到垂直速度差delta_vz:
[0015][0016]
将所述垂直速度差delta_vz乘以增益系数kvz转换为法向过载控制量delta_nz:
[0017][0018]
在本技术的至少一个实施例中,步骤二中,所述获取滚转角以及滚转角速率,并根据所述滚转角以及所述滚转角速率计算出飞机做滚转机动情况下的法向过载补偿量包括:
[0019]
获取滚转角gama以及滚转角速率w_x;
[0020]
根据所述滚转角gama以及所述滚转角速率w_x计算出飞机做滚转机动情况下的法向过载补偿量delta_nz1:
[0021][0022]
在本技术的至少一个实施例中,步骤三中,所述将所述法向过载控制量与所述法向过载补偿量进行叠加,得到法向过载增量控制指令包括:
[0023]
将所述法向过载控制量delta_nz与所述法向过载补偿量delta_nz1进行叠加,得到法向过载增量控制指令delta_nz_base:
[0024]
delta_nz_base=delta_nz+delta_nz1。
[0025]
在本技术的至少一个实施例中,在得到所述法向过载增量控制指令delta_nz_base后,还包括对所述法向过载增量控制指令delta_nz_base进行
±
0.15限幅。
[0026]
发明至少存在以下有益技术效果:
[0027]
本技术的大型飞机垂直速度自动控制方法,根据目标垂直速度和实际垂直速度信号,采用比例控制算法控制飞机按照目标垂直速度飞行,并且针对飞机的滚转机动,进行相应的法向过载补偿,能够保证飞机的在垂直速度模态下准确跟踪上目标垂直速度,且在进行滚转机动时能够稳定的按照目标垂直速度上升和下降,并保证飞机飞行过程中法向过载较小,控制精度高,飞行品质较高。
附图说明
[0028]
图1是本技术一个实施方式的大型飞机垂直速度自动控制方法流程图;
[0029]
图2是本技术一个实施方式的大型飞机垂直速度自动控制方法设计原理图。
具体实施方式
[0030]
为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。下面结合附图对本技术的实施例进行详细说明。
[0031]
在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装
置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。
[0032]
下面结合附图1至图2对本技术做进一步详细说明。
[0033]
本技术提供了一种大型飞机垂直速度自动控制方法,包括以下步骤:
[0034]
s100、获取目标垂直速度以及实际垂直速度,并根据目标垂直速度以及实际垂直速度计算出法向过载控制量;
[0035]
s200、获取滚转角以及滚转角速率,并根据滚转角以及滚转角速率计算出飞机做滚转机动情况下的法向过载补偿量;
[0036]
s300、将法向过载控制量与法向过载补偿量进行叠加,得到法向过载增量控制指令,并根据法向过载增量控制指令,实现飞机的垂直速度自动控制。
[0037]
本技术的大型飞机垂直速度自动控制方法,步骤s100中,获取目标垂直速度以及实际垂直速度,并根据目标垂直速度以及实际垂直速度计算出法向过载控制量包括:
[0038]
获取目标垂直速度d_vz,目标垂直速度d_vz经过目标垂直速度速率限幅器后得到目标垂直速度指令d_vz_c:
[0039][0040]
其中,s为传递函数的一种计算代号;
[0041]
获取实际垂直速度vz,计算出目标垂直速度指令d_vz_c与实际垂直速度vz的差值,得到垂直速度差delta_vz:
[0042][0043]
将垂直速度差delta_vz乘以增益系数kvz转换为法向过载控制量delta_nz:
[0044][0045]
其中,d_vz、vz的单位为m/s,kdvz取值2,kvz取值0.025。
[0046]
进一步,本技术的大型飞机垂直速度自动控制方法,步骤s200中,在获取滚转角gama以及滚转角速率w_x后,根据滚转角gama以及滚转角速率w_x计算出飞机做滚转机动情况下的法向过载补偿量delta_nz1:
[0047][0048]
其中,滚转角速率w_x的单位为deg/s。
[0049]
最后,步骤s300中,将上述方式得到的法向过载控制量delta_nz与法向过载补偿量delta_nz1进行叠加,得到法向过载增量控制指令delta_nz_base:
[0050]
delta_nz_base=delta_nz+delta_nz1。
[0051]
有利的是,本实施例中,在得到法向过载增量控制指令delta_nz_base后,还包括对法向过载增量控制指令经过限幅器(cz_nzbase_u_lim、cz_nzbase_d_lim)进行
±
0.15限幅。
[0052]
本技术的大型飞机垂直速度自动控制方法,将由目标垂直速度d_vz经过垂直速度
速率限幅滤波器后,形成目标垂直速度指令d_vz_c,和实际垂直速度vz进行作差计算,形成垂直速度差delta_vz,然后通过增益系数kvz,折算成法向过载控制量delta_nz,再加上由滚转角gama和滚转角速率w_x确定的法向过载补偿量delta_nz1,经过过载增量输出指令限制器(cz_nzbase_u_lim、cz_nzbase_d_lim)后,形成最终的法向过载增量输出指令delta_nz_base,作为飞机的纵向通道指令,进而控制飞机按照目标垂直速度上升或者下降。本技术是在兼顾自动保持飞机按照目标垂直速度飞行,同时在进行滚转机动时依旧能够保持目标垂直速度,且垂直速度不会出现大波动飞行的自动控制算法。
[0053]
本技术的大型飞机垂直速度自动控制方法,自动飞行控制系统根据目标垂直速度和实际垂直速度信号,采用比例控制算法控制飞机按照目标垂直速度飞行,同时在飞机进行滚转机动时进行法向过载补偿,能够自动控制飞机稳定的按照目标垂直速度上升或者下降飞行,并兼顾滚转机动时,垂直速度能够稳定并满足精度要求。本技术飞机法向过载较小,控制精度高,飞行品质良好。
[0054]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1