一种基于CPG-Hopf网络耦合算法的水下六足机器人步态生成与转换方法
一种基于cpg-hopf网络耦合算法的水下六足机器人步态生成与转换方法
技术领域
1.本发明设计属于足式仿生机器人控制领域,具体涉及针对水下六足机器人的一种基于cpg-hopf网络耦合算法的步态生成与步态转换算法研究。
背景技术:
2.水下环境充满了不确定性因素,对水下环境的探索需要借助特定的工具,例如rov、auv、uuv等水下航行器。但是由于此类水下航行器很难具备海底附近低速作业的能力,使得大量海底作业存在众多困难。随着机器人仿生技术的不断发展,足式机器人被用于众多领域,而足式机器人的运动特性符合海底作业的要求。因此,对于水下足式机器人的研究具有重要意义。
3.不同于履带式机器人和轮式机器人,水下足式机器人利用行走机构以非连续的点接触形式在地面行走,具备在非结构环境中稳定行走的能力。为了丰富水下足式机器人的运动步态和特种环境下的越障功能,水下六足机器人成为最优的选择。与普通的水下六足机器人相比,基于弧形腿的六足机器人以滚动代替转动,以面接触代替点接触,使得水下六足机器人具备更强的越障能力。
4.由于水下六足机器人具有较多的关节,因此多关节机器人的稳定运动需要关节间的相互协调,广大学者对此进行了大量的研究。如唐开强提出了一种基于深度强化学习的六足机器人步态规划方法,包括:获取环境信息、进行环境建模、落脚点筛选、制定上层运动策略、下层执行策略以及机器人运动驱动六个步骤。该六足机器人步态规划方法让六足机器人利用深度学习和强化学习算法,能够在走由环境抽象而来的梅花桩迷宫问题中求解最优路径,并且能够根据最优路径选择合适的落脚点,从而实现在非结构环境的高效行走。高海波提出了一种降低液压驱动六足机器人功率和流量消耗的运动规划方法,涉及足式机器人运动规划领域,针对六足机器人采用现有运动规划方法导致六足机器人的功率和流量需求过大的问题。
5.由此可见,设计一种实用可靠,协调度高,转换顺滑的水下六足机器人步态生成与转换算法有着重要的意义。
技术实现要素:
6.为了解决水下六足机器人步态生成时存在步态耦合困难,步态转换过程中弧形腿的关节角度发生突变,对机器人的机械与控制系统造成冲击,本发明提供了一种基于cpg-hopf网络耦合算法的步态生成方法和基于插值算法的步态转换方法。
7.本发明为了解决上述问题,采取的技术方案如下:
8.研究了一种基于拓扑网络结构的耦合关系,水下六足机器人的关节间的协调通过建立6个髋关节cpg-hopf振荡器之间的相位耦合关系来实现,称为cpg-hopf网络耦合振荡器。其中,每个髋关节之间采用了全对称连接的网络拓扑结构,cpg-hopf网络耦合振荡器的
输出的无量纲信号映射到髋关节的关节角度信号。同时,通过连续改变负载因子和权重矩阵的值,来实现各个步态之间的平滑转换。具体算法步骤如下:
9.步骤1:采用一种基于cpg-hopf网络耦合算法对步态进行数值解析;
10.步骤1.1:初始化算法所要用到的参数;
11.步骤1.2:定义cpg-hopf网络耦合算法的数学模型;
12.步骤1.3:定义旋转矩阵计算函数;
13.步骤1.4:计算cpg-hopf网络耦合算法的连接权重矩阵和相位相关系数;
14.步骤1.5:定义读取当地时间函数;
15.步骤1.6:定义用于求解非线性常微分方程的四阶runge-kutta函数;
16.步骤2:将cpg-hopf网络耦合算法得到的无量纲值映射到水下六足机器人髋部角度;
17.步骤2.1:获取cpg-hopf网络耦合算法当前解算得到的无量纲值data0与上一次循环得到的无量纲值data1;
18.步骤2.2:对比两次得到的无量纲值;
19.步骤2.3:若data0>data1,则判断为水下六足机器人的腿部处于支撑状态;
20.步骤2.4:若data0≤data1,则判断为水下六足机器人的腿部处于摆动状态;
21.步骤2.5:确定水下六足机器人腿部的状态位置后,根据当前基于cpg-hopf网络耦合算法得到的无量纲值data0进行角度映射;
22.步骤3:根据步态变化的需求,进行水下六足机器人的步态转换;
23.步骤3.1:对负载因子和权重矩阵的值进行线性插值操作;
24.步骤3.2:重复步骤1和步骤2。
25.本发明能产生的有益结果是:
26.1)本发明提出了一种步态生成方法,即一种cpg-hopf网络耦合算法,实现了水下六足机器人各个步态下运动过程中动作的协调一致性。
27.2)本发明提出了一种步态切换方法,实现了水下六足机器人步态之间切换的稳定性、平滑性。
28.3)利用一种cpg-hopf网络耦合算法,同时实现了水下六足机器人步态切换过程中各个髋关节角度间的协调一致,避免机器人出现步态紊乱,机身失稳等状况发生。
附图说明
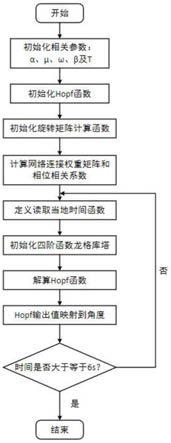
29.图1为水下六足机器人cpg-hopf网络耦合算法的流程图
30.图2为水下六足机器人步态转换流程图
31.图3为cpg-hopf网络耦合算法控制拟合信号图
32.图4为cpg-hopf网络耦合算法拟合角度控制信号图
33.图5为步态转换下cpg-hopf网络耦合算法控制拟合信号图
34.图6为步态转换下cpg-hopf网络耦合算法拟合角度控制信号图
具体实施方案
35.为了使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参
照附图,对本发明进一步详细说明。
36.本文所考虑的cpg-hopf网络耦合算法的水下六足机器人步态生成与切换方法是针对水下六足机器人,在水下行走过程中需要以某种或多种步态方式运动,为了使得机器人在行走过程中动作协调、姿态稳定。针对这一需求,水下六足机器人的步态生成和步态转换方案应该是合理的、最优的。
37.本发明所提出的一种基于cpg-hopf网络耦合算法的水下六足机器人步态生成与切换方法,包括以下步骤:
38.步骤1:采用cpg-hopf网络耦合算法对步态进行数值解析
39.首先,我们对cpg-hopf振荡单元进行数学描述:
40.cpg-hopf振荡器模型的主要任务是产生稳定的周期性振荡信号,由于cpg-hopf振荡器模型形式简单、参数较少、计算量小、便于分析、易于实现,因此种基于cpg-hopf振荡单元是最优的选择。其数学表达式如下:
[0041][0042]
式中,x、y为状态量,μ决定振荡器的幅值,ω为振荡器的频率,α用于控制振荡器收敛到极限环的速度。
[0043]
cpg-hopf振荡单元是一个生成稳定的周期信号的振荡器,实现起来相对简单,具有很好的周期性效果,并且可调节性强。因此本发明基于cpg-hopf振荡单元设计了网络耦合算法,即基于cpg-hopf网络耦合算法来实现水下六足机器人运动步态的生成。
[0044]
图1为cpg-hopf网络耦合算法的流程图。
[0045]
步骤1.1:初始化算法所要用到的参数,包括仿真时间步长t、收敛速度α、幅值系数μ、频率系数ω、负载因子β、转换速度b和状态量初值x0、y0;
[0046]
步骤1.2:定义cpg-hopf网络耦合算法的数学模型;
[0047][0048]
式中,xi、yi是振荡器的输出;θ
ij
是指i和j振荡器之间的相位关系;为旋转矩阵,它描述了各个振荡器之间的相位耦合关系。
[0049]
步骤1.3:定义旋转矩阵计算函数;
[0050][0051]
步骤1.4:计算cpg-hopf网络耦合算法的连接权重矩阵和相位相关系数;
[0052]
相位相关系数为:
[0053]
q=[x
1 y
1 x
2 y
2 x
3 y
3 x
4 y
4 x
5 y
5 x
6 y6]
ꢀꢀꢀ
(4)
[0054]
在式(3)中,令令计算权重矩阵:
[0055][0056]
步骤1.5:读取当地时间函数;
[0057]
步骤1.6:定义用于求解非线性常微分方程的四阶runge-kutta函数;
[0058]
对于微分方程,
[0059][0060]
采用四阶runge-kutta算法:
[0061][0062]
给定步骤1.1的状态量初值x0、y0,解算cpg-hopf网络耦合算法。
[0063]
步骤2:将解算cpg-hopf网络耦合算法后得到的无量纲值映射到水下六足机器人髋部角度;
[0064]
图2为水下六足机器人步态转换流程图。如图2所示。包括以下步骤:
[0065]
步骤2.1:获取cpg-hopf网络耦合算法当前解算得到的无量纲值data0与上一次循环得到的无量纲值data1;
[0066]
步骤2.2:对比两次得到的无量纲值;
[0067]
步骤2.3:若data0>data1,则判断为水下六足机器人的腿部处于支撑状态;
[0068]
角度映射方式如下:
[0069][0070]
步骤2.4:若data0≤data1,则判断为水下六足机器人的腿部处于摆动状态;
[0071]
角度映射方式如下:
[0072]
[0073]
步骤2.5:确定水下六足机器人腿部的状态位置后,根据当前解算cpg-hopf网络耦合算法后得到的无量纲值data0进行角度映射;
[0074]
步骤3:根据步态变化的需求,进行水下六足机器人的步态转换;
[0075]
步骤3.1:对负载因子和权重矩阵的值进行线性插值操作;
[0076]
其中i为当地时间,m、n为线性插值系数。
[0077]
步态相位关系系数其中ui为插值系数。
[0078]
步骤3.2:重复步骤1和步骤2。
[0079]
具体实施例程:
[0080]
步骤1:以三角步态为例,给定初始值;
[0081]
α=20000,b=100,μ=0.0225,ω=4π,t=0.01s,
[0082]
q=[x
1 y
1 x
2 y
2 x
3 y
3 x
4 y
4 x
5 y
5 x
6 y6]=[0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.100.11 0.12]
[0083]
λ=[0,0.5,0.5,0,0,0.5]
[0084]
步骤2:输出cpg-hopf网络耦合算法控制拟合信号如图3,角度控制信号如图4;
[0085]
步骤3:以三角步态向四足步态转换为例;
[0086]
四足步态下的线性插值系数m=12,n=6,其余系数与步骤1相同。
[0087]
cpg-hopf网络耦合算法控制拟合信号如图5,角度控制信号如图6。
[0088]
以上所述实施例仅表达了本发明的优选实施方式,其描述虽具体且详细,但并不能因此而理解为对本发明的专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形,改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1